

РГР / kontrolnaya_rabota_lokalnye_sistemy_upravleniya_variant_50
.docФедеральное агентство по образованию
Московский государственный открытый университет
Чебоксарский политехнический институт
Кафедра
Управления и информатики в технических системах
Специальность 220201
Контрольная работа №1
по курсу «Локальные системы управления»
Вариант № 50
Дата проверки: Выполнила студентка:
Цветкова Н.В.
Результат проверки: Учебный шифр: 607081
Курс: 3 (сокращ.)
Замечания: Проверила: Изосимова Т.А.
2010 год
Задание на контрольную работу.
|
№ варианта |
Закон регулирования |
Критерий качества регулирования |
|
50. |
ПИД |
20%
перерегулирования ( |
-
Для ПИД – закон регулирования
![]()

![]()
-
Выбрать кривую разгона согласно варианту задания (рис.1).
-
Аппроксимировать кривую разгона апериодическим звеном первого порядка с запаздыванием. Определить соотношение угла наклона
 .
. -
Найти оптимальные настройки регулятора (метод Копеловича).
-
Найти передаточную функцию замкнутой системы.
-
Определить выражение замкнутой ВЧХ
 .
. -
Методом трапеций найти переходной процесс соответствующим регулятором.
-
Смоделировать АСР с использованием программы 20-sim.
-
Произвести сравнительный анализ полученной системы.
Решение.
-
Выберем кривую разгона согласно варианту задания.
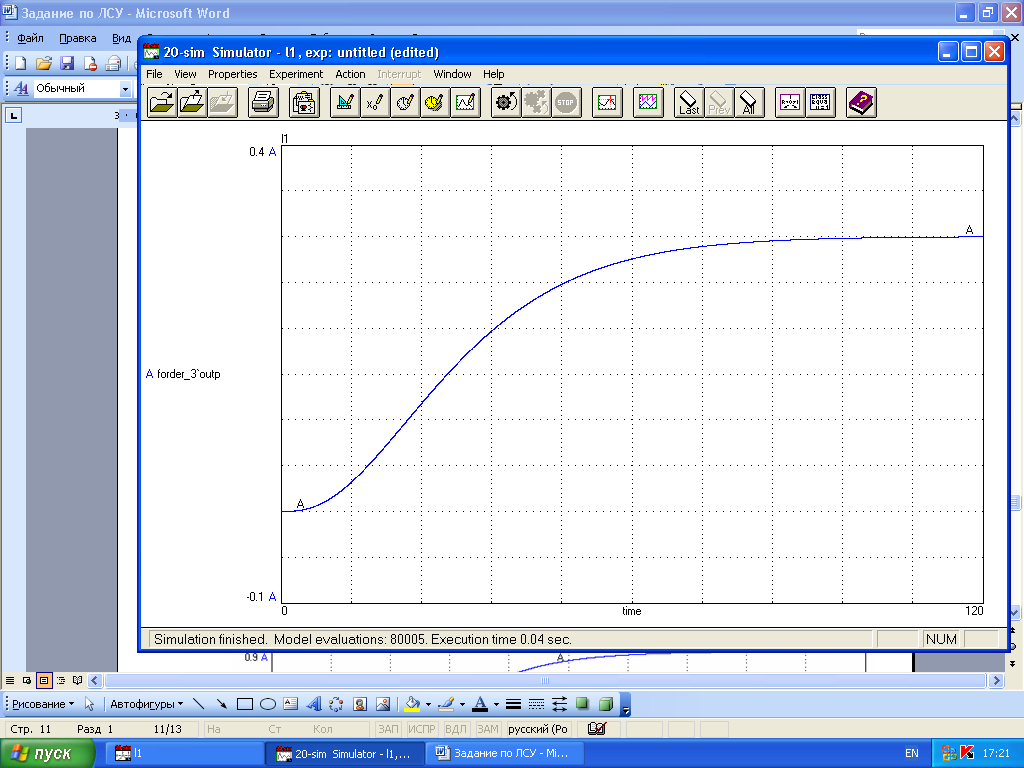
Рис.1.
-
Аппроксимируем кривую разгона апериодическим звеном первого порядка с запаздыванием. Определим соотношение угла наклона
 ,
,
 .
.
Воспользуемся простейшим методом аппроксимации переходных функций.
Проведем к кривой
разгона (рис.2.) через точку перегиба
касательную и обозначим отрезок,
отсекаемый касательной на оси абсцисс,
буквой
![]() ,
а отрезок от точки пересечения касательной
с линией нового установившегося состояния
до
,
а отрезок от точки пересечения касательной
с линией нового установившегося состояния
до
![]() буквой
буквой
![]() .
.
Из рисунка определим:
![]()
![]()
![]()
Соотношение угла наклона:
![]()
 Рис.2.
Рис.2.
-
Найдем оптимальные настройки регулятора с помощью метода Копеловича.
Для нахождения динамических настроек регулятора воспользуемся приближенными формулами, приведенными А.П. Копеловичем для объектов с самовыравниваем:
Для ПИД-регулятора с 20% перерегулирования:
![]()
![]()
![]()
где
![]() - коэффициент усиления объекта,
- коэффициент усиления объекта,
![]() - транспортное
запаздывание,
- транспортное
запаздывание,
![]() - постоянная времени
объекта регулирования.
- постоянная времени
объекта регулирования.
![]()
![]()
![]()
-
Найдем передаточную функцию замкнутой системы
 .
.
Передаточная функция ПИД-регулятора имеет вид:
![]() ,
,
тогда передаточная функция разомкнутой системы:
 и тогда передаточная
функция замкнутой системы:
и тогда передаточная
функция замкнутой системы:

или
![]()
Произведем замену
![]() ,
тогда передаточная функция примет вид:
,
тогда передаточная функция примет вид:
![]()
5. Определим
выражение замкнутой ВЧХ
![]() .
.
По условию для ПИД - закона регулирования

![]()
![]()
Подставим наши
найденные значения и вычислим выражение
замкнутой ВЧХ
![]() :
:

![]()
6. Методом трапеций найдем переходный процесс соответствующего регулятора.
6.1. С помощью
программы Maple
7 построим график ВЧХ
![]() .
.


Рис. 3.
6.2. График Р(w) разобьем на трапеции 1, 2, 3, 4, для каждой из которых определим ее параметры Рi(0), wdi, wki (рис. 4.).
Значения Рi(0) вычислим с помощью пакета Maple 7 (см. ниже).
|
Трапеция 1 |
Трапеция 2 |
Трапеция 3 |
Трапеция 4 |
||||
|
Р1(0) |
1,0533 |
Р2(0) |
0,7991 |
Р3(0) |
0,2287 |
Р4(0) |
0,0795 |
|
ωd1 |
0,1710 |
ωd2 |
0,1830 |
ωd3 |
0,2100 |
ωd4 |
0,2370 |
|
ωk1 |
0,1800 |
ωk2 |
0,2030 |
ωk3 |
0,2260 |
ωk4 |
0,2730 |
|
χ1= ωd1/ωk1 |
0,9500 |
χ 2= ωd2/ωk2 |
0,9015 |
χ 3= ωd3/ωk3 |
0,9292 |
χ 4= ωd4/ωk4 |
0,8681 |

Рис. 4.

6.3. Для каждой из этих трапеций при помощи таблицы h-функций построим график hi(t), при этом относительное время τ пересчитаем в натуральное ti = τ / wki.
-
Трапеция 1
Трапеция 2
Трапеция 3
τ
h(τ)
t = τ/ωk1
h(t) = P1(0)∙h(τ)
τ
h(τ)
t = τ/ωk2
h(t) = P2(0)∙h(τ)
τ
h(τ)
t = τ/ωk3
h(t) = P3(0)∙h(τ)
0
0
0,000
0,000
0
0
0,000
0,000
0
0
0,000
0,000
0,5
0,314
2,778
0,331
0,5
0,297
2,463
0,237
0,5
0,297
2,212
0,068
1
0,603
5,556
0,635
1
0,575
4,926
0,459
1
0,575
4,425
0,132
1,5
0,844
8,333
0,889
1,5
0,813
7,389
0,650
1,5
0,813
6,637
0,186
2
1,02
11,111
1,074
2
0,986
9,852
0,788
2
0,986
8,850
0,225
2,5
1,133
13,889
1,193
2,5
1,105
12,315
0,883
2,5
1,105
11,062
0,253
3
1,178
16,667
1,241
3
1,172
14,778
0,937
3
1,172
13,274
0,268
3,5
1,175
19,444
1,238
3,5
1,175
17,241
0,939
3,5
1,175
15,487
0,269
4
1,118
22,222
1,178
4
1,141
19,704
0,912
4
1,141
17,699
0,261
4,5
1,053
25,000
1,109
4,5
1,085
22,167
0,867
4,5
1,085
19,912
0,248
5
0,986
27,778
1,039
5
1,019
24,631
0,814
5
1,019
22,124
0,233
5,5
0,932
30,556
0,982
5,5
0,962
27,094
0,769
5,5
0,962
24,336
0,220
6
0,906
33,333
0,954
6
0,922
29,557
0,737
6
0,922
26,549
0,211
6,5
0,905
36,111
0,953
6,5
0,903
32,020
0,722
6,5
0,903
28,761
0,207
7
0,925
38,889
0,974
7
0,909
34,483
0,726
7
0,909
30,973
0,208
7,5
0,958
41,667
1,009
7,5
0,934
36,946
0,746
7,5
0,934
33,186
0,214
8
1,004
44,444
1,058
8
0,97
39,409
0,775
8
0,97
35,398
0,222
8,5
1,041
47,222
1,096
8,5
1,006
41,872
0,804
8,5
1,006
37,611
0,230
9
1,061
50,000
1,118
9
1,039
44,335
0,830
9
1,039
39,823
0,238
9,5
1,066
52,778
1,123
9,5
1,059
46,798
0,846
9,5
1,059
42,035
0,242
10
1,056
55,556
1,112
10
1,063
49,261
0,849
10
1,063
44,248
0,243
10,5
1,033
58,333
1,088
10,5
1,055
51,724
0,843
10,5
1,055
46,460
0,241
11
1,005
61,111
1,059
11
1,034
54,187
0,826
11
1,034
48,673
0,236
11,5
0,977
63,889
1,029
11,5
1,01
56,650
0,807
11,5
1,01
50,885
0,231
12
0,958
66,667
1,009
12
0,984
59,113
0,786
12
0,984
53,097
0,225
12,5
0,949
69,444
1,000
12,5
0,965
61,576
0,771
12,5
0,965
55,310
0,221
13
0,955
72,222
1,006
13
0,955
64,039
0,763
13
0,955
57,522
0,218
13,5
0,97
75,000
1,022
13,5
0,954
66,502
0,762
13,5
0,954
59,735
0,218
14
0,99
77,778
1,043
14
0,965
68,966
0,771
14
0,965
61,947
0,221
14,5
1,01
80,556
1,064
14,5
0,981
71,429
0,784
14,5
0,981
64,159
0,224
15
1,03
83,333
1,085
15
1,001
73,892
0,800
15
1,001
66,372
0,229
15,5
1,04
86,111
1,095
15,5
1,019
76,355
0,814
15,5
1,019
68,584
0,233
16
1,039
88,889
1,094
16
1,031
78,818
0,824
16
1,031
70,796
0,236
16,5
1,028
91,667
1,083
16,5
1,036
81,281
0,828
16,5
1,036
73,009
0,237
17
1,012
94,444
1,066
17
1,032
83,744
0,825
17
1,032
75,221
0,236
17,5
0,988
97,222
1,041
17,5
1,023
86,207
0,817
17,5
1,023
77,434
0,234
18
0,979
100,000
1,031
18
1,008
88,670
0,805
18
1,008
79,646
0,231
18,5
0,969
102,778
1,021
18,5
0,933
91,133
0,746
18,5
0,933
81,858
0,213
19
0,956
105,556
1,007
19
0,981
93,596
0,784
19
0,981
84,071
0,224
19,5
0,973
108,333
1,025
19,5
0,973
96,059
0,778
19,5
0,973
86,283
0,223
20
0,985
111,111
1,038
20
0,972
98,522
0,777
20
0,972
88,496
0,222
20,5
1,001
113,889
1,054
20,5
0,974
100,985
0,778
20,5
0,974
90,708
0,223
21
1,01
116,667
1,064
21
0,981
103,448
0,784
21
0,981
92,920
0,224
21,5
1,024
119,444
1,079
21,5
0,997
105,911
0,797
21,5
0,997
95,133
0,228
22
1,029
122,222
1,084
22
1,012
108,374
0,809
22
1,012
97,345
0,231
22,5
1,026
125,000
1,081
22,5
1,022
110,837
0,817
22,5
1,022
99,558
0,234
23
1,016
127,778
1,070
23
1,025
113,300
0,819
23
1,025
101,770
0,234
23,5
1,002
130,556
1,055
23,5
1,023
115,764
0,817
23,5
1,023
103,982
0,234
24
0,988
133,333
1,041
24
1,015
118,227
0,811
24
1,015
106,195
0,232
24,5
0,979
136,111
1,031
24,5
1,005
120,690
0,803
24,5
1,005
108,407
0,230
25
0,975
138,889
1,027
25
0,991
123,153
0,792
25
0,991
110,619
0,227
25,5
0,977
141,667
1,029
25,5
0,986
125,616
0,788
25,5
0,986
112,832
0,225
26
0,983
144,444
1,035
26
0,984
128,079
0,786
26
0,984
115,044
0,225