

Методи регулювання рівня та закони регулювання автоматичних регуляторів в сар рівня
В залежності від заданої точності регулювання рівня застосовують:
а) позиційне регулювання, при якому рівень в апараті підтримується в заданих межах LНLLВ, де LН, LВ - задані нижнє і верхнє значення рівня. Позиційні системи регулювання застосовуються в збірниках рідин, в проміжних ємностях та ін. При досягненні граничного значення рівня відбувається автоматичне перемикання потоку на запасну ємність (рис.5).

Рис. 5. Приклад позиційного регулювання рівня: 1 - насос; 2 - технологічний апарат; 3 - давач рівня; 4 - регулятор рівня; 5, 6 - регулюючі клапани
б) неперервне регулювання, яке забезпечує стабілізацію рівня на заданому значенні L=L0.
Вибір законів регулювання в САР рівня залежить від заданих показників якості регулювання.
Рівень рідини схильний до коливань при наявності зовнішніх збурень. В промислових апаратах рівень рідини, як правило, коливається з амплітудою, яка в деяких випадках може досягати 20-30% від номінального значення рівня. В більшості випадків контури регулювання рівня швидкодіючі, бо період коливань складає декілька секунд. Введення Д - складової в закон регулювання недоцільно, бо це приводить до збільшення амплітуди коливань.
В неперервних системах регулювання можуть застосовуватись П - регулятори, якщо за умовами роботи ОР допустима статична похибка регулювання і збурення, що діють на ОР, не мають постійної складової. Теоретично САР рівня з П - регулятором є стійкою при будь-яких збуреннях і коефіцієнтах передачі регулятора. Для зменшення статичної похибки регулювання необхідно збільшувати коефіцієнт передачі регулятора. Для реальних ОР під оптимальним значенням коефіцієнта передачі П - регулятора приймають таке, при якому ще відсутній коливний перехідний процес. Для забезпечення стійкості контуру достатньо встановити невеликий діапазон пропорційності регулятора.
ПІ-регулятори застосовуються в ОР, де рівень впливає не тільки на гідродинамічну рівновагу в об’єкті, а й на теплові процеси. Так, наприклад, в парових теплообмінниках, рівень конденсату визначає поверхню теплообміну. Вимоги до точності регулювання рівня в таких апаратах є достатньо високі.
До найбільш розповсюджених (99% від існуючих) систем регулювання рівня відносять одноімпульсні системи (регулювання рівня безпосередньо за значенням лише рівня).
При відсутності фазових перетворень в технологічному апараті рівень у ньому регулюють одним із двох способів (рис. 6):
а) зміною витрати рідини на вході в апарат (регулювання на „притоку”);
б) зміною витрати рідини на виході з апарата (регулювання на „стоку”);

Рис. 6. Спрощені ФСА неперервного регулювання рівня: а) регулювання „на притоку”;
Б) регулювання „на стоку”; 1- регулятор рівня; 2 - регулюючий орган
В деяких
випадках для регулювання рівня
використовують каскадні САР (регулювання
співвідношення витрат на вході в
технологічний апарат і на виході із
нього з корекцією за рівнем). Для прикладу
розглянемо систему регулювання рівня
у барабані котла, який працює у регулюючому
режимі (рис. 7). При зміні витрати пари
регулятор 2 автоматично змінює витрату
живильної води
![]() до тих пір, поки
до тих пір, поки
![]() не
стане рівним
не
стане рівним
![]() внаслідок чого матеріальна рівновага
у барабані котла відновиться. Регулятор
2 реагує як на зовнішнє збурення за
відбором пари
внаслідок чого матеріальна рівновага
у барабані котла відновиться. Регулятор
2 реагує як на зовнішнє збурення за
відбором пари
![]() ,
так і на збурення
,
так і на збурення
![]() .
Цей регулятор реалізує рівняння
матеріального балансу у системі, тому
рівень L
у барабані котла змінюється повільно.
У випадку відхилення рівня L
від
заданого
значення
.
Цей регулятор реалізує рівняння
матеріального балансу у системі, тому
рівень L
у барабані котла змінюється повільно.
У випадку відхилення рівня L
від
заданого
значення
![]() регулятор 1 коректує роботу регулятора
2 у напрямку виконання умов:
регулятор 1 коректує роботу регулятора
2 у напрямку виконання умов:
![]() =
=![]() і L=
і L=![]() .
.
Характерною
особливістю такої САР є можливість
швидко реагувати на зовнішні збурення
(в даному випадку витрата пари
![]() ),
ще до зміни основної регульованої
величини (рівня L
в барабані парового котлоагрегату).
),
ще до зміни основної регульованої
величини (рівня L
в барабані парового котлоагрегату).
Ці системи значно складніші від одноконтурних САР, але враховуючи широкі можливості комп’ютерної техніки вони все ширше впроваджуються у практику сучасних систем автоматизації.

Рис. 7. Каскадна САР рівня в барабані парового котлоагрегату:
1 -
регулятор рівня; 2 - регулятор співвідношення
![]() :
:![]() ;
3 - первинні перетворювачі витрати
;
3 - первинні перетворювачі витрати
![]() ,
,
![]() ;
;
![]() ,
,
![]() - витрата пари та живильної води,
відповідно.
- витрата пари та живильної води,
відповідно.
У випадку коли гідродинамічні процеси в апараті супроводжуються фазовими перетвореннями, рівень можна регулювати шляхом зміни подачі теплоносія (або холодагента) (рис.8) або витрати конденсату. В таких апаратах рівень взаємопов’язаний з іншими параметрами, (наприклад, тиском PS) тому вибір способу регулювання рівня в кожному випадку повинен виконуватися з врахуванням решти контурів регулювання.
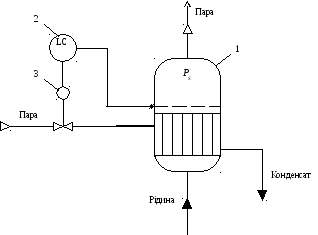
Рис.8. Спрощена ФСА рівня у випарнику:
1 - випарник; 2 - регулятор рівня; 3 – регулюючий орган