

4.8 Разработка уточнённой структурной схемы Проектирование уточнённой схемы микроЭвм на базе заданных микросхем (рисунок - 25).
В процессе проектирования было произведено уточнение представленной упрощенной схемы.
В состав микропроцессорной системы были добавлены, многорежимный буферный регистр К589ИР12, контроллер клавиатуры и дисплея КР580ВВ79, дешифратор К555ИД4.
Многорежимный буферный регистр (МБР), является универсальным 8-разрядиым регистром с выходами, имеющими три состояния. Он имеет встроенную логическую схему и независимый триггер для формирования запроса на прерывание центрального процессора. Одни или несколько МБР могут использоваться для реализации многих типов интерфейсных и вспомогательных устройств, включая: простые регистры данных; буферные регистры со стробированием данных; мультиплексоры; двунаправленные шиииые формирователи; прерываемые каналы ввода/вывода и др.
Контроллер клавиатуры и дисплея, это программируемое устройство, предназначенное для построения систем (подсистем) отображения информации на основе дисплеев (индикаторов) различных типов, а также систем (подсистем) ввода информации из различного типа клавиатур. Эта БИС позволяет автоматически сканировать клавиатуру, определить и выдать код позиции клавиши, нажатой в матрице клавиатуры, подавить помехи дребезга контактов клавиатуры, а также регенерировать изображение на дисплее (индикаторе).
Дешифратор–микросхема средней степени интеграции, предназначенные для преобразования двоичного кода в напряжении логического уровня, появляющаяся в том выходном проводе, десятичный номер которого соответствует двоичному коду. При подаче на входы 3, 6, 7, 4 кода чисел 0-9 на том выходе, номер которого соответствует десятичному эквиваленту входного кода, появляется логический 0, на остальных выходах -логическая 1: при входных кодах, соответствующих числам 10-15, на всех выходах – логическая 1.
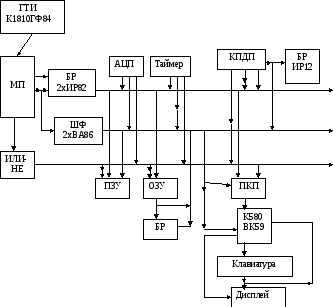
Рисунок 46- Уточнённая структурная схема
5 РАЗРАБОТКА АЛГОРИТМА РАБОТЫ МИКРОПРОЦЕССОРНОЙ
СИСТЕМЫ
Обработка
информации от цифровых датчиков и выдача
управляющего воздействия y1
производится путем ввода значений x1,
x2,
x3,
x4
и вычисления булевой функции f1(x1,
x2,
x3,
x4)=
При единичном значении f1 вырабатывается управляющий сигнал y1=1 длительностью t1=80мкс.
При обработке информации с аналоговых датчиков ПМ принимает коды NU1, NU2 с выходов АЦП и код константы К с регистра пульта управления. Далее вычисляется значение функции NU=f2(NU1,NU2, К)= NU1 – NU2 -К и сравнивается с константой Q, хранящейся в ПЗУ. В зависимости от результатов сравнения вырабатывается (аналогично y1) один из двух двоичных управляющих сигналов y2 или y3 заданной длительности по следующему правилу: если NU<Q, то выдать y2 длительностью t2=75 мкс, иначе выдать y3 длительностью t3=30мкс.
Далее формируется управляющее воздействие Y4, для чего с АЦП вводится значение NU3 и производится вычисление по формуле:

Значение Y4 в виде 8-разрядного кода выдается на вход ЦАП.
Все двоичные переменные и константы, участвующие в вычислениях: NU1, NU2, NU3, К, Q, A0, A1, Y4 рассматриваются как целые без знака.
После выдачи всех управляющих воздействий проверяется состояние тумблера «СТОП» на пульте управления. Если СТОП=0, цикл управления начинается с начала, иначе выполняется процедура останова системы, включающая следующие действия: формируется сигнал установки системы в исходное состояние путем подачи на линию начальной установки интерфейса двух прямоугольных импульсов длительностью 30 мкс интервалом 30 мкс, выполняется команда процессора СТОП.
Блок-схема заданного цикла управления разбита на две части (рисунок 37 и 38), общая блок-схема представлена на рисунке 39.
В общем виде управляющая программа состоит из двух циклов, по результатам выполнения которых осуществляется выдача управляющих воздействий на индикацию. Управляющая программа выполняется до тех пор, пока на пульте управления не будет включен тумблер «СТОП».
Цикл
1 управляющей программы заключается в
вводе в центральный процессор значений
сигналов из цифровых датчиков, вычислении
булевой функции y
=
 .
Если по результатам вычисления получилось,
что управляющий сигнал стал равен 1, то
выдается управляющий сигнал длительностьюt1=80
мкс. Если же управляющий сигнал принял
значение 0, то булевая функция y
=
.
Если по результатам вычисления получилось,
что управляющий сигнал стал равен 1, то
выдается управляющий сигнал длительностьюt1=80
мкс. Если же управляющий сигнал принял
значение 0, то булевая функция y
=
 вычисляется
вновь.
вычисляется
вновь.
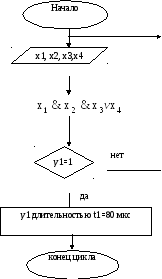
Рисунок 47– Цикл 1 управляющей программы
Цикл
2 управляющей программы заключается в
воде в центральный процессор двоичных
кодов с выходов АЦП и констант К и Q,
вычислении значения функции f2(NU1,
NU2,
К), по выражению NU=
NU1
– NU2
-К. Если по
результатам вычисления получилось, что
NU<Q,
то вырабатывается управляющий сигнал
длительность t2=75
мкс, если же получилось что NU>Q,
то вырабатывается управляющий сигнал,
длительностью t3=75мкс.
Далее осуществляется ввод в центральный
процессор двоичного кода с выхода АЦП
NU3
и производиться вычисление функции
 .
.
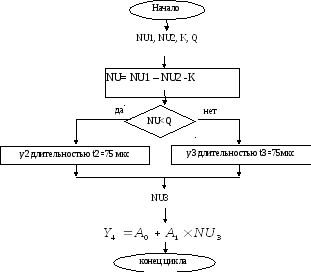
Рисунок 48 – Цикл 2 управляющей программы
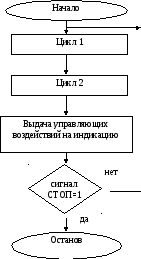
Рисунок 49– Общая блок-схема программы
ЗАКЛЮЧЕНИЕ
В ходе курсовой работы разработан автомат-регулятор угла опережения зажигания на микроЭВМ. В процессе работы разработана электрическая схема устройства, проведен анализ критериев выбора микропроцессора, анализ структуры микропроцессора, а также анализ аналогов МП. Из этого анализа следует, что используемый в разработанной системе микропроцессор (К1810ВМ86), является наиболее предпочтительным для разработанного устройства.
СПИСОК ЛИТЕРАТУРЫ
Микропроцессорные БИС и микроЭВМ / А.А. Васенков, Н.М. Воробьев, В.Л. Дшхунян и др.; Под ред. А.А. Васенкова. – М.: Советское радио, 1980. – 280с.
Бирюков А. Цифровой автомат-регулятор угла ОЗ. – Радио, 1999, №1, с.46-48; №2, с. 40,41.
Банников В. Усовершенствованный блок управления экономайзером. – Радио, 1991, №8, с. 28-31.
Бирюков А. Цифровой октан-регулятор. – Радио. 1987, №10. с.34-37.
Микропроцессоры / Под ред. Преснухина Л.Н. – М.: Высш. школа, 1986.
Горбунов В.П., Панфилов Д.И., Преснухин Л.Н. Справочное пособие по МП и микроЭВМ. – Ленинград.: Энергоатомиздат, 1983.
Напрасник М.В. Микропроцессоры и микроЭВМ: Учебное пособие для техн. – М.: Высш. шк., 1989. – 192с.: ил.
Калабеков Б.А. Микропроцессоры и их применение в системах передачи и обработки сигналов: Учеб. Пособие для вузов. – М.: Радио и связь, 1988. – 368с.: ил.