

-
Расчет ускорений
Расчет ускорений проводится для двух положений рабочего хода механизма, в которых сила полезного сопротивления не равна нулю. Ускорения определяются подобно скоростям, расчет которых был проделан выше (п. 2.1.2). В данном курсовом проекте рассчитываются линейные и угловые ускорения в положениях механизма №1 и №4.
Первоначально определим ускорение точки А кривошипа. Оно является постоянным и равно произведению квадрата угловой скорости кривошипа на его длину:
![]() .
(2.7)
.
(2.7)
![]() м/с2.
м/с2.
Нахождение ускорений будем производить методом планов, для этого запишем векторное уравнение ускорения точки В:
![]() (2.8)
(2.8)
где
![]() и
и
![]() -
нормальная и тангенциальная составляющие
ускорения звена АВ
соответственно.
-
нормальная и тангенциальная составляющие
ускорения звена АВ
соответственно.
Решим
уравнение (2.10) графически. Для этого
примем масштабный коэффициент плана
ускорений
![]() ,
равный:
,
равный:
![]() ,
,
где
![]() мм.
мм.
![]()
![]() .
.
![]()
![]() .
.
Строим план ускорений согласно направлению векторов:
-
![]() направлено
из точки А
в точку О1;
направлено
из точки А
в точку О1;
-
![]() направлено
из точки В
в точку А;
направлено
из точки В
в точку А;
-
![]() направлено
перпендикулярно звену АВ;
направлено
перпендикулярно звену АВ;
-
направление
![]() задается
направляющей t – t.
задается
направляющей t – t.
Определим нормальную составляющую ускорения звена АВ:
![]() ,
(2.9)
,
(2.9)
![]() м/с2.
м/с2.
Для построения плана ускорений:
-
выбираем полюс ра (рис. 2.1.6);
-
строим вектор ускорения точки А;
-
из конца вектора
 строим луч параллельный звену АВ,
и на этом луче откладываем отрезок an
равный:
строим луч параллельный звену АВ,
и на этом луче откладываем отрезок an
равный:
 ;
; -
через точку n проводим прямую перпендикулярную АВ, отмечаем точку пересечения ее с направляющей t-t – точка b;
-
отрезок раb – ускорение точки В на плане ускорений.
Ускорения центров масс определяем по принципу подобия:
![]() ,
,![]() мм.
мм.
План ускорений для положения №1 представлен на рис. 2.1.6

Рис. 2.1.6 План ускорений для положения №1
Численные значения ускорений вычислим по формулам:
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() 1/с2,
1/с2,
Полученные значения всех ускорений для положений механизма №1 и №4 приведены в таблице 3.
Таблица 3
|
|
aa |
ab |
aAB |
aτAB |
anAB |
as2 |
ε2 |
|
|
м/с2 |
1/с2 |
|||||
|
№1 |
155,23 |
105,6 |
74,5 |
66,7 |
34,1 |
130,4 |
40,5 |
|
№4 |
155,23 |
57,4 |
141,3 |
141,3 |
6,6 |
96,2 |
85,6 |
-
Кинематический анализ методом диаграмм
Метод кинематических диаграмм м позволяет наглядно просмотреть, как изменяются перемещение, скорость и ускорение за цикл работы механизма. В данном курсовом проекте диаграммы позволяют определить крайние точки механизма.
Анализ
методом диаграмм начнем с построения
диаграммы скорости. Первоначально
выбираем масштабный коэффициент
диаграммы
![]() .
Для определения коэффициента необходимо
учесть максимальное значение скорости
выходного звена, которое было определено
выше (п 2.1.2). Примем масштабный коэффициент
равный
.
Для определения коэффициента необходимо
учесть максимальное значение скорости
выходного звена, которое было определено
выше (п 2.1.2). Примем масштабный коэффициент
равный
![]()
 .
.
Для
построения диаграмм нам потребуется
масштабный коэффициент времени
![]() и масштабный коэффициент угла поворота
и масштабный коэффициент угла поворота
![]() .
Эти коэффициенты рассчитаем по формулам:
.
Эти коэффициенты рассчитаем по формулам:
![]() ,
,
где
tц
– время цикла,
![]() ,
,
![]() ;
L=252
мм.
;
L=252
мм.
![]() сек/мм.
сек/мм.
![]() рад/мм.
рад/мм.
Переносим скорости выходного звене на диаграмму скоростей с учетом полученных масштабных коэффициентов. Полученные значения скоростей соединяем линией, и в результате имеем диаграмму для скорости выходного звена в двенадцати положениях механизма .
Диаграмма скорости строится на первом листе графической части.
Для определения крайних положений механизма находим точки пересечения диаграммы с горизонтальной осью. Эти точки и будут соответствовать крайним положениям. Воспользовавшись масштабным коэффициентом угла поворота переносим крайние положения на разметку механизма (п 2.1.1)
После построения диаграммы скорости строим диаграмму перемещений выходного звена, для этого:
-
выбираем масштабный коэффициент
диаграммы перемещения
![]() м/мм;
м/мм;
-
значение
![]() и
и
![]() принимаем
те же, что и для диаграммы скорости;
принимаем
те же, что и для диаграммы скорости;
- переносим значения перемещения с разметки механизма;
- соединяем полученные точки кривой.
Диаграмма ускорений строится методом графического дифференцирования. Для этого:
-
диаграмму скоростей аппроксимируем ломаной линией;
-
с диаграммы скоростей ось абсцисс переносим на диаграмму ускорений и продолжаем её за начало координат (влево);
-
откладываем отрезок Н = 30 мм;
-
на диаграмме скоростей определяем точку 1 /, затем соединяем её с точкой О прямой линией:
-
из точки Р проводим луч, параллельный хорде О1/. Получаем точку 1//;
-
отрезок О1// изображает среднее ускорение на временном интервале (0;1);
-
чтобы найти точку диаграммы ускорений необходимо из середины временного интервала (0;1) восстановить перпендикуляр и на этот перпендикуляр спроецировать точку 1//;
-
эти построения повторяем для всего временного интервала.
Определим масштабный коэффициент диаграммы ускорений:
![]() ;
;
![]()
 .
.
Раздел 3. Кинетостатический анализ механизма
Цели кинетостатического анализа:
-
определение силы полезного сопротивления в рассматриваемых положениях механизма;
-
определение реакций в кинематических парах;
-
определение уравновешивающего момента методом планов;
-
определение уравновешивающего момента методом “жесткого рычага” Н.Е. Жуковского
3.1. Силовой расчет методом планов
Силовой расчет методом планов позволяет определить реакции в кинематических парах и уравновешивающий момент. Этот метод прост, нагляден и достаточно точен для инженерных расчетов.
3.1.1. Определение силы полезного сопротивления
Сила полезного сопротивления определяется по диаграмме сил, данной в задании на курсовой проект.
Для нахождения силы сопротивления перенесем с разметки механизма крайние положения и в масштабе построим диаграмму сил. Значение силы полезного сопротивления равно максимальному значению силы сопротивления. Рпс1 = 1250 Н, Рпс4 = 2000 Н.
3.1.2. Силовой расчет прицепной структурной группы
Прицепная структурная группа состоит из шатуна АВ и ползуна.
Перенесем
звено АВ
с разметки механизма и в точке А
освободим его от связей, отбросив звено
1 и заменив действие этого звена реакцией
![]() ,
которое, в свою очередь, имеет нормальную
,
которое, в свою очередь, имеет нормальную
![]() и тангенциальную
и тангенциальную
![]() составляющие.
составляющие.
К звеньям группы прикладываем силы тяжести, инерции, полезного сопротивления, реакции связей. На схеме нагружения (рис. 3.1.1) силы изображаем отрезками произвольной величины, но строго выдерживая направления этих сил. Силу полезного сопротивления направляем в сторону противоположную скорости. Силы инерции направляем в сторону противоположные ускорению соответствующих точек.

Рис. 3.1.1. Схема нагружения прицепной группы
Определим силу инерции ползуна:
![]() ,
(3.1)
,
(3.1)
![]() Н.
Н.
Силы инерции звена АВ:
![]() ,
(3.2)
,
(3.2)
![]() Н.
Н.
Определим силу веса ползуна:
![]() (3.3)
(3.3)
![]() Н.
Н.
Определим силу веса звена АВ:
![]() (3.4)
(3.4)
![]() Н.
Н.
Момент
![]() (3.5) – направлен в сторону противоположную
угловому ускорению.
(3.5) – направлен в сторону противоположную
угловому ускорению.
![]() Н*м.
Н*м.
Запишем сумму моментов относительно точки В2:
![]() (3.5)
(3.5)
Из
уравнения (3.3) выразим![]() :
:
![]() (3.6)
(3.6)
![]()
Плечи моментов определим по формулам:
![]() ,
,
![]() м;
м;
![]() ,
,
![]() м.
м.
Запишем сумму всех сил, действующих на группу:
![]() .
(3.7)
.
(3.7)
Решим
уравнение (3.7) графически (рис. 3.1.4).
Выберем масштабный коэффициент
![]() .
Последовательно строим вектора всех
сил в соответствии с уравнением (3.7) так,
чтобы неизвестные реакции
.
Последовательно строим вектора всех
сил в соответствии с уравнением (3.7) так,
чтобы неизвестные реакции
![]() и
и
![]() строились в последнюю очередь. Пересечение
линий действия этих двух векторов дадут
решение данного уравнения. На рис. 3.1.4
представлен план сил для прицепной
группы в положении №1 механизма.
строились в последнюю очередь. Пересечение
линий действия этих двух векторов дадут
решение данного уравнения. На рис. 3.1.4
представлен план сил для прицепной
группы в положении №1 механизма.
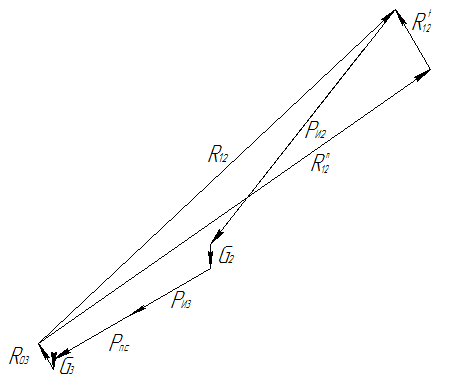
Рис. 3.1.4. План сил для прицепной группы
Определим численные значения неизвестных реакций:
![]() ,
,
![]() Н.
Н.
![]() ,
,
![]() Н.
Н.
![]() ,
,
![]() Н.
Н.
Полученные значения вычислений и построений заносим в таблицу4.
Таблица 4
|
|
|
|
|
|
|
|
|
|
|
|
№1 |
1250 |
4200 |
-980 |
4350 |
123 |
322 |
4290 |
1330 |
600 |
|
№4 |
2000 |
280 |
-1580 |
1600 |
123 |
322 |
3170 |
724 |
1320 |