

4.4 Программируемый контроллер клавиатуры и индикации кр580вв79
БИС КР58ОВВ79 представляет собой программируемое интерфейсное устройство, предназначенное для ввода и вывода информации в системах на основе микропроцессоров КР580ИК80А и К1810ВМ86 [3, 11]. Микросхема программируемого контроллера клавиатуры и индикации (ПККИ) состоит из двух основных функционально разделимых частей; клавиатурной и дисплейной. Клавиатурная часть предназначена для сопряжения с клавиатурой печатающих устройств и с произвольными наборами переключателей. Дисплейная часть ПККИ позволяет отображать информацию с помощью индикаторов различных типов. Упрощенная структурная схема ПККИ приведена на рисунке 24.
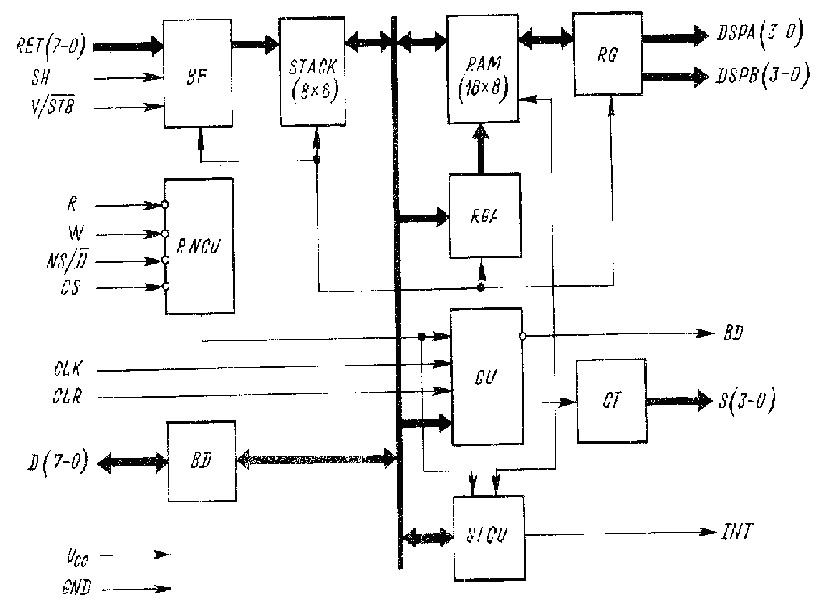
Рисунок 24 — Структурная схема программируемого контроллера клавиатуры и индикации КР580ВВ79
В состав БИС входят: буферы клавиатуры и датчиков (ВF), включающие также схему управления и устранения дребезжания клавиатуры, предназначенные для хранения входной информации в режимах сканирования клавиатуры, наборов датчиков и ввода по стробу; схема управления вводом/выводом (RWCU), вырабатывающая сигналы управления обменом с МП и внутренними пересылками данных и команд; буферы канала данных (ВD), предназначенные для обмена информацией между ПККИ и МП; ОЗУ клавиатуры датчиков (SТАСК), работающее по принципу ПРО и предназначенное для хранения кодов позиций клавиш и состояний ключей датчиков; ОЗУ отображения (RАМ), сохраняющее информацию, отображаемую на дисплее; регистр адреса ОЗУ отображения (RGА), предназначенный для хранения адреса данных, записываемых или считываемых микропроцессором; схема управления и синхронизации (СU), состоящая из регистров хранения команд и счетчика синхронизации и осуществляющая управление работой всей микросхемы; схема анализа состояния ОЗУ-датчиков (STCU) контролирующая число символов в ОЗУ и формирующая сигнал прерывания INТ; регистры ОЗУ отображения (RG), предназначенные для хранения данных отображаемых на выходах каналов А и В; счетчик сканирования (СТ), вырабатывающий сигналы сканирования клавиатуры, датчиков и дисплея.
Назначение входных, выходных и управляющих сигналов ПККИ при-ведено при описании выводов микросхемы в таблице 15.
Таблица 15 — Описание выводов программируемого контроллера клавиатуры и индикации КР580ВВ79
-
Обозначение вывода
Номер контакта
Назначение вывода
1
2
3
RET (7-0)
8;7;6;5;2;
1; 39; 38
Входы линий возврата, служащие для подачи сигналов от датчиков через контакты клавиш или ключа
SH
36
Вход сигнала сдвига, используемого для ска-нирования клавиатуры
V/ STB
37
Вход сигнала управления для режима сканирования клавиатуры или стробирующего сигнала для режима ввода по стробу
R
10
Вход сигнала чтения L-уровня, разрешающего передачу информации из ПККИ в канал данных МП
INT
4
Выход сигнала прерывания
CLR
9
Вход сигнала установки ПККИ в исходное состояние
Продолжение таблицы 15
-
1
2
3
W
11
Вход сигнала записи L-уровня, разрешающего передачу информации из канала данных МП в ПККИ

21
Вход для управления записью/чтением данных или команд; при сигнале Н-уровня происходит запись команды или чтения состояния ПККИ, при сигнале L-уровня — запись или чтение данных
CS
22
Вход сигнала выбора микросхемы; L-уровень сигнала разрешает работу схемы
CLK
3
Вход сигнала синхронизации микросхемы
D(7~0)
19;18;17;16;
15;14;13;12
Входы/выходы канала данных
DSP A( 3-0)
24-27
Выходы канала А
DSP B( 3-0)
28-31
Выходы канала В
BD
23
Выход сигнала гашения отображения L-уровня
S(3-0)
35;34;33;32
Выходы сигналов сканирования клавиш клавиатуры или набора датчиков и дисплея
Ucc
40
Вход напряжения питания ( + 5 В)
GND
20
Вход напряжения питания (0 В)
На рисунке 25 показано включение микросхемы в микропроцессорную систему, управляющую работой клавиатуры и дисплея.
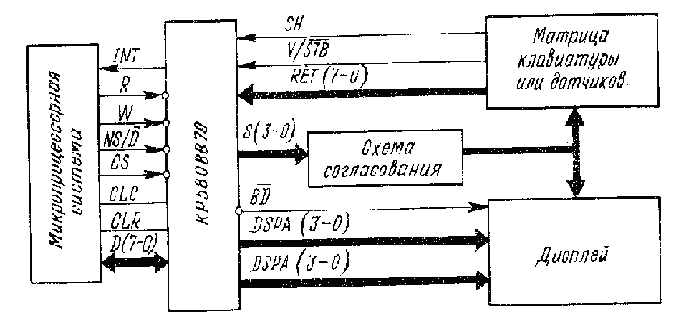
Рисунок 25 — Схема включения программируемого контроллера клавиатуры и индикации КР580ВВ79 в микропроцессорную систему
Клавиатурная часть ПККИ имеет три режима работы: режим сканирования клавиатуры, режим определения состояния набора датчиков и режим ввода по стробу.
В режиме сканирования клавиатуры байт информации, вводимой в SТАСК, содержит код позиции нажатой клавиши и два бита сигналов управления. Разряду D7 соответствует состояние сигнала V/STB, а разряду D6 — сигнала SH. Разряды D3 - D5 определяют номер строки нажатой клавиши, а разряды D0 - D2 — номер столбца. После записи кода позиции клавиши в SТАСК на выходе INT устанавливается напряжение Н-уровня. В этом режиме с помощью схемы управления и устранения дребезжания клавиатуры осуществляется также отработка ситуаций, возникающих при одновременном нажатии клавиш.
Режим сканирования клавиатуры может выполняться с обнаружением двух нажатых клавиши. В этой разновидности режима вводится код только одной нажатой клавиши. Одновременное нажатие двух клавиш не воспринимается до тех пор, пока одна из них не будет отпущена. Другая разновидность режима разрешает одновременное нажатие N клавиш (не более восьми), распознает их и вводит коды позиций в SТАСК в соответствии с порядком обнаружения. В последнем варианте с помощью специальной команды можно задать режим обнаружения ошибок, в котором наличие двух нажатых клавиш рассматривается как одновременное нажатие и вызывает установку в слове состояния ПККИ флага ошибки.
В
режиме определения состояния набора
датчиков по входам RЕТ (7 — 0) производится
построчный ввод в SТАСК состояний
ключей датчиков. При этом SТАСК работает
как обычное ОЗУ, каждая ячейка которого
загружается состоянием соответствующей
строки набора датчиков. В этом режиме
не используются входы
![]() и SН и схема устранения дребезжания
клавиатуры. При обнаружении изменения
состояний датчиков на выходе INТ в
конце интервала сканирования
устанавливается, как правило, напряжение
H-уровня.
и SН и схема устранения дребезжания
клавиатуры. При обнаружении изменения
состояний датчиков на выходе INТ в
конце интервала сканирования
устанавливается, как правило, напряжение
H-уровня.
В
режиме ввода по стробу ввод в SТАСК со
входов RЕТ(7 — 0) происходит при переходе
стробирующего сигнала на входе
![]() из состояния L-уровня
в состояние H-уровня.
Вход SН и схема устранения дребезжания
клавиатуры в этом режиме не используются,
а длительность стробирующего сигнала
должна быть не меньше периода частоты
синхронизации микросхемы.
из состояния L-уровня
в состояние H-уровня.
Вход SН и схема устранения дребезжания
клавиатуры в этом режиме не используются,
а длительность стробирующего сигнала
должна быть не меньше периода частоты
синхронизации микросхемы.
Дисплейная часть ПККИ имеет два режима работы: режим ввода слева и режим ввода справа со сдвигом.
В режиме ввода слева каждой позиции дисплея соответствует определенная строка в ОЗУ отображения (RАМ). Нулевому адресу в RАМ соответствует крайний левый символ. Ввод символов, начиная с нулевого адреса, вызывает построчное отображение информации слева направо.
Ввод справа со сдвигом используется в электронных калькуляторах. Здесь ввод первого символа производится в крайнюю справа позицию дисплея. Следующий ввод также производится в крайнюю правую позицию, а все отображение сдвигается на один символ влево. В этом режиме нет прямого соответствия между позицией отображаемого символа и адресом строки RАМ, поэтому рекомендуется использовать последовательный ввод, начиная с нулевого адреса.
Информация на выходах DSРА (3 - 0) канала А соответствует разрядам D7 - D4 канала данных, а на выходах DSРВ(3-0) — разрядам D3 - D0.
Сигналы сканирования на выходах S(3 — 0) вырабатываются счетчиком сканирования (СТ), обеспечивающим два вида сигналов сканирования: кодированные сигналы и дешифрированные. Кодированные сигналы сканирования являются выходами четырех последних разрядов счетчика синхронизации и должны дешифрироваться внешним дешифратором для получения сигналов сканирования клавиатуры и индикаторов.
Режимы работы ПККИ устанавливаются программно с помощью записи в него команд по каналу данных. Перед программированием режима микросхема должна быть установлена в исходное состояние подачей на вход СLR напряжения H-уровня длительностью не менее шести тактовых импульсов.
Для контроля состояния ПККИ микропроцессор может считывать слово-состояние БИС из внутреннего 8-разрядного регистра слова-состояния.
Разряды D3 — D0 слова-состояния определяют число символов в ОЗУ клавиатуры и датчиков. Разряды D4 и D5 представляют флаги ошибок и используются в клавиатурном режиме и режиме ввода по стробу. Разряд D4 устанавливается при чтении символа из пустого ОЗУ, а разряд D6— при записи в заполненное ОЗУ. Разряд D6 в режиме набора датчиков устанавливается в том случае, если происходит замыкание хотя бы одного ключа датчиков. В режиме сканирования клавиатуры при записи команды «сброс прерывания — установка режима обнаружения ошибок» разряд D6 выполняет функцию флага ошибки. Он устанавливается при обнаружении одновременного нажатия нескольких клавиш. Разряд D7 слова состояния информирует о прекращении доступа к ОЗУ.
Основные электрические параметры микросхемы КР580ВВ79 в диапазоне от -10 до +70°С таковы:
Входное напряжение логической единицы UIH, В:
на входах REТ (7-0) . . . . > 2,2
на всех остальных входах > 2,0
Входное напряжение логического нуля UIL, В:
на входах RЕТ (7-0) .... < 1,4
на всех остальных входах . . . < 0,8
Выходное напряжение логической единицы UOH, В:
на выходе ШТ > 3,5
на всех остальных выходах. < 2,4
Выходное напряжение логического нуля UOL, В < 0,45
Выходной ток логической единицы IOH, мА < 0,15
Выходной ток логического нуля IOL мА < 1,9
Период
тактового импульса
![]() ,
нс > 500
,
нс > 500
Время сканирования одной клавиши tSK , мкс > 80
Время сканирования клавиатуры tSKA, мс > 5,12
Время сканирования дисплея tSDSP, мс > 10,24
Время задержки для устранения
дребезжания клавиатуры tWAIT , мс > 10,24
4.5 Разработка уточненной структурной схемы
4.5.1 Подключение программируемого контроллера приоритетных прерываний KI810BH59A. Микросхема К1810ВН59А является расширенным функциональным аналогом БИС КР580ВН59 и может использоваться в блоках приоритетных прерываний (БПП) микроЭВМ, построенных на основе МПК серий КР580 и К1810.
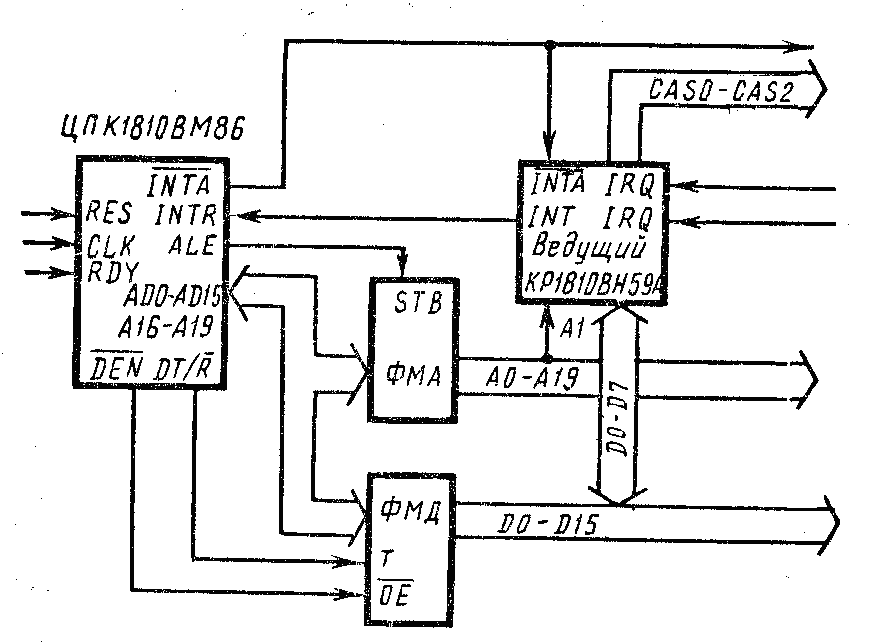
Рисунок 26 — Первый вариант подключения ведущей и ведомых БИС контроллеров прерываний К1810ВН59А к ЦП К1810ВМ86, включенному в минимальный режим
При
работе с процессором К1810ВМ86 БПП
программируется на формирование
однобайтового вектора прерываний в
ответ на поступление 2-го сигнала
![]() с шины управления микроЭВМ. Схема имеет
8 уровней запросов прерывания
IRQ0—IRQ7, однако возможно расширение
уровней до 64 за счет подключения
дополнительных 8 ведомых микросхем
К1810ВН59А.
с шины управления микроЭВМ. Схема имеет
8 уровней запросов прерывания
IRQ0—IRQ7, однако возможно расширение
уровней до 64 за счет подключения
дополнительных 8 ведомых микросхем
К1810ВН59А.
На рисунок 26 показан наиболее простой способ подключения ведущей и ведомых микросхем К1810ВН59А к МП К1810ВМ86, работающему в минимальном режиме. Недостаток этого способа подключения — низкая нагрузочная способность магистрали данных из-за непосредственного подключения к ней выводов данных всех контроллеров прерываний.
4.5.2 Организация обмена данными по каналу прямого доступа к памяти (ПДП) микроЭВМ. В МПК серии К1810 для организации обмена данными по каналу ПДП применяют программируемый 4-канальный контроллер прямого доступа КПДП БИС К1810ВТ37. Эта микросхема является расширенным функциональным аналогом БИС КПДП КР58ОВТ57 и отличается более широкими возможностями программирования режимов работы всех четырех каналов ПДП.

Рисунок 27 — Подключение контроллера прямого доступа к памяти БИС К1810ВТ37
При работе в минимальном режиме МП К1810ВМ86, аналогично МП БИС КР580ВМ80А, обрабатывает сигнал запроса захвата магистралей HOLD и вырабатывает ответный сигнал подтверждения и захвата HLDA, переводя локальную магистраль в третье состояние. Поэтому подключение КПДП К1810ВТ37 к МП К1810ВМ86, работающему в минимальном режиме, незначительно отличается от подключения БИС КПДП КР580ВТ57 к процессору КР580ВМ80А. Вариант включения КПДП К1810ВТ37 показан на рисунке 27.
Магистраль данных DB0—DB7 контроллера ПДП подключена непосредственно к разрядам AD8—AD15 локальной магистрали МП БИС К1810ВМ86. Такое включение позволяет использовать регистр магистрали адреса для фиксации разрядов А8—А15 адреса ПДП, выдаваемых БИС КПДП на шину данных на первом такте циклов ПДП. Разряды адреса А16—А19 в циклах обмена по каналу ПДП выдаются с дополнительного регистра с тремя состояниями на выходе. Информация в него может быть задана как программно, так и схемотехнически.
Для формирования шины управления МП БИС К1810ВМ86 используют мультиплексор К555КП11 с тремя состояниями на выходе, позволяющий отключать сигналы управления МП в циклах ПДП, когда управление микропроцессорной системой берет на себя КПДП К1810ВТ37.
В данной схеме по каналу ПДП можно передавать информацию только побайтно, поэтому сигнал ВНЕ можно получить инверсией сигнала адреса А0. Для передачи по КПДП 16-разрядных слов за один цикл необходимо подключить разряды А0—А7 БИС КПДП к разрядам А0—А7 магистрали адреса соответственно и использовать отдельный регистр фиксации разрядов А8—А15 адреса ПДП, подключенный выходом к шине адреса А9-А16 также со смещением. При этом сигналы А0 и ВНЕ должны быть равны 0.
В
максимальном режиме захват магистралей
МП БИС К1810ВМ86 производится под управлением
двунаправленных сигналов запроса
—подтверждения захвата
![]() и
и
![]() .
Поэтому для подключения КПДП к МП,
работающему в максимальном режиме,
необходимо использование спе-циальной
схемы, преобразующей сигналы HOLD/HLDA
в
.
Поэтому для подключения КПДП к МП,
работающему в максимальном режиме,
необходимо использование спе-циальной
схемы, преобразующей сигналы HOLD/HLDA
в
![]() .
.