

5 Разработка алгоритма работы мпс
Обработка
информации от цифровых датчиков и выдача
управляющего воздействия y1 производится
путем ввода значений x1, x2, x3, x4 и вычисления
булевой функции f1(Х1, Х2, Х3, Х4)=
![]() .
.
При единичном значении f1 вырабатывается управляющий сигнал y1=1 длительностью t1=200мкс.
При обработке информации с аналоговых датчиков ПМ принимает коды NU1, NU2 с выходов АЦП и код константы К с регистра пульта управления. Далее вычисляется значение функции NU=f2(NU1,NU2, К)=min(NU1,NU2+K) и сравнивается с константой Q, хранящейся в ПЗУ. В зависимости от результатов сравнения вырабатывается (аналогично y1) один из двух двоичных управляющих сигналов y2 или y3 заданной длительности по следующему правилу: если NU<Q, то выдать y2 длительностью t2=30 мкс, иначе выдать y3 длительностью t3=40мкс.
Далее формируется управляющее воздействие Y4, для чего с АЦП вводится значение NU3 и производится вычисление по формуле:
![]()
Значение Y4 в виде 8-разрядного кода выдается на вход ЦАП.
Все двоичные переменные и константы, участвующие в вычислениях: NU1, NU2, NU3, К, Q, A0, A1, Y4 рассматриваются как целые без знака.
После выдачи всех управляющих воздействий проверяется состояние тумблера «СТОП» на пульте управления. Если СТОП=0, цикл управления начинается с начала, иначе выполняется процедура останова системы, включающая следующие действия: формируется сигнал установки системы в исходное состояние путем подачи на линию начальной установки интерфейса двух прямоугольных импульсов длительностью 30 мкс интервалом 30 мкс, выполняется команда процессора СТОП.
Блок-схема заданного цикла управления представлена на рисунке 28.
y1
длительностью t1=200
мкс
нет
да![]()










- ввод в ЦП двоичных кодов с выходов
АЦП и констант К и Q.

- вычисление значения функции
f2(NU1,
NU2,
К)
- условие на
результат вычисления.
- выдача управляющего сигнала.
NU= min(NU1;
NU2+K)
y2
длительностью t2=30
мкс
y3
длительностью t3=60мкс
нет
да
- ввод в ЦП двоичных кодов с выходов
АЦП и констант К и Q.![]()
















- вычисление значения функции
f2(NU1,
NU2,
К)
- условие на
результат вычисления.
- выдача управляющих
сигналов
Выдача управляющих
воздействий на индикацию



- ввод в ЦП двоичного кода с выхода АЦП
NU3
- вычисление функции Y4
- выдача управляющих воздействий
по результатам 2 циклов на светодиодную
индикацию
нет
да
- проверка состояния тумблера «СТОП»
на пульте управления.
Рисунок 28 — Блок-схема управляющей программы
6 Реализация одноплатной микроэвм пмв02 на базе мп к1810вм86
Для магистрально-модульных микросредств управляющей вычисли-тельной техники серии В9, применяемых в промышленных системах автоматизации, была разработана высокопроизводительная 16-разрядная одноплатная микроЭВМ типа ПМВ02 на база МПК БИС К1810. МикроЭВМ, представленная на рисунке 29, конструктивно выполнена на одной печатной плате площадью 9 дм2.
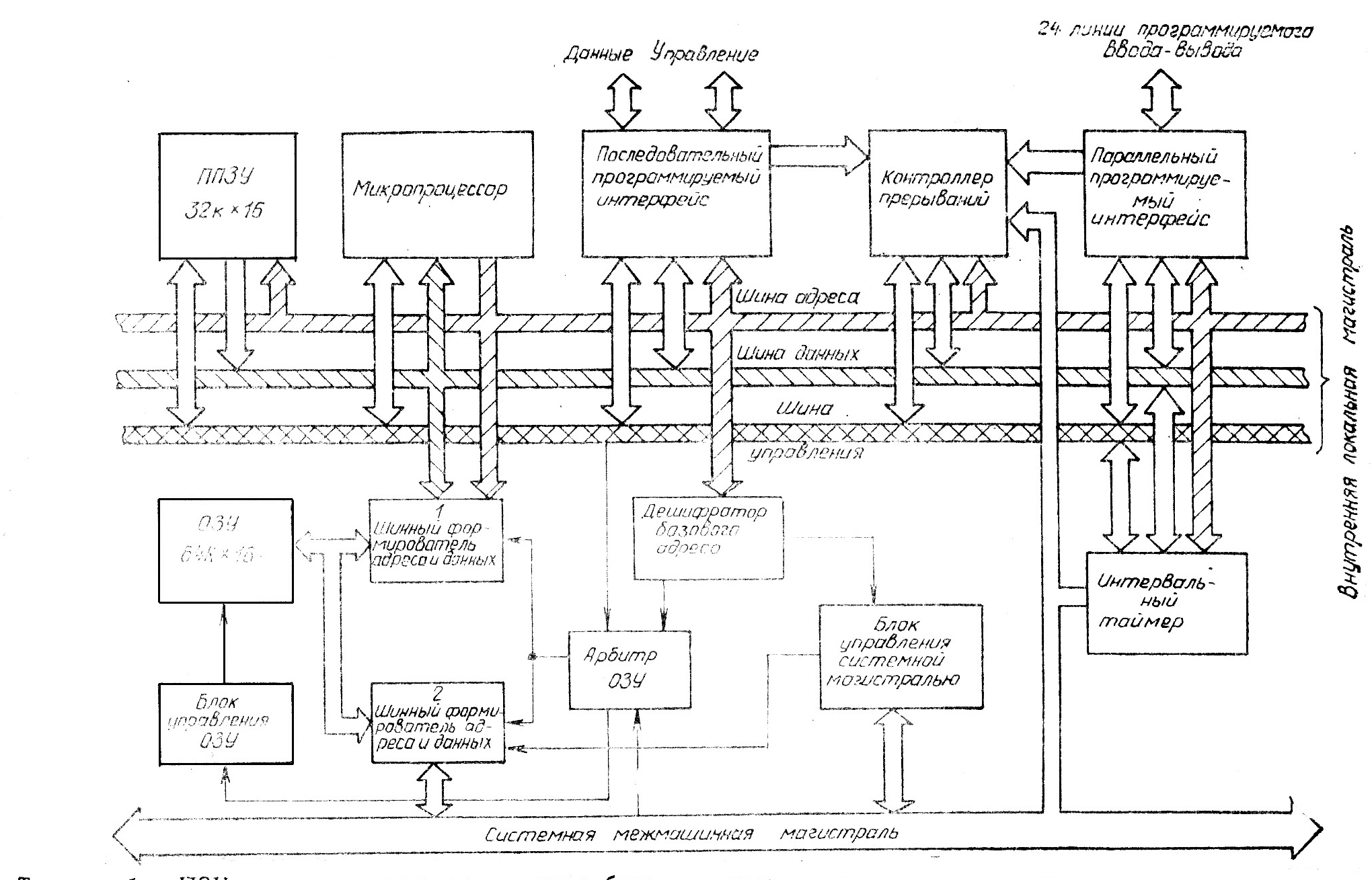
Рисунок 29 — Структурная схема микроЭВМ ПМВ02
В микросхеме, собираемой из набора плат МСУВТ В7/В9, совместная работа ведущих одноплатных микроЭВМ и ведомых плат ЗУ, УВВ, УСО и т.д. осуществляется через системную межмашинную магистраль (ММ), совместимую с международной системной магистралью IEEE 796. Это позволяет организовать объединенную симметричную мультипроцессорную вычислительную систему, в которой МП с собственной локальной памятью могут связываться через общее разделяемое пространство системной памяти.
Внутренняя локальная магистраль (ВМ) содержит ША, ШД, ШУ и связывает внутриплатные ресурсы микроЭВМ.
Центральный процессорный узел (ЦПУ), представленный на рисунке 30, одноплатной микроЭВМ использует микросхемы 16-разрядного МП КМ1810ВМ86, генератора тактовых импульсов КР1810ГФ84 и системного контроллера КР1810ВГ88.
Выход OSC генератора КР1810ГФ84 управляет контроллеров динамического ОЗУ. Таким образом, все внутренние ресурсы микроЭВМ работают синхронно с генератором КР1810ГФ84 и внутренний сигнал «Готовность» подается непосредственно на вход генератора.
Сигналы «готовность», получаемые из системной магистрали ММ при работе микроЭВМ с ведомыми платами (расширителями памяти и ввода-вывода, контроллерами дисков и т.д.), асинхронны с импульсами генератора КР1810ГФ84.
Системный контроллер КР1810ВГ88 декодирует сигналы состояния МП и вырабатывает сигналы работы с памятью, вводом-выводом и контроллером прерывания, которые выдает на ШУ.
ПЗУ (16К или 64Кбайт) включает в себя специальную микросхему, содержащую контрольные разряды каждого байта, дополняя число единиц байта до нечетного. Все обращения к ПЗУ контролируются по честности. Триггер сбоя ПЗУ имеет сигнализацию и может быть отсоединен контроллером прерывания соей или другой одноплатной микроЭВМ, используемой в микросхеме.
В ПЗУ содержатся постоянные программы: пользователя, монитор и тесты платы.
Для проверки работы контрольного оборудования один из байтов ПЗУ имеет неправильную четность. Обращение к этой ячейке должно вызвать установку триггера сбоя ПЗУ.
ОЗУ (128 Кбайт) реализовано на микросхемах динамической памяти К565РУ5. Каждый байт имеет контрольный разряд. При записи в него идет информация, дополняющая число единиц до нечетного. При чтении контролируется четность. Триггер сбоя ОЗУ имеет сигнализацию и может быть подсоединен к контроллеру прерывания своей или другой микроЭВМ. После включения питания программ монитор производит «очистку» ОЗУ, устанавливая таким образом правильные значения контрольных разрядов.
Для проверки работы контрольного оборудования имеется триггер (управляемый как порт ввода-вывода), блокирующий запись информации в контрольный разряд. Таким образом, в ОЗУ можно записать «четную» информацию и при чтении ее вызвать установку триггера сбоя ОЗУ.
ОЗУ — двухпортовое. Один порт обслуживает обращения от внутреннего МП, другой — со стороны системной магистрали ММ.
Шинные формирователи адреса и данных 1 (на базе КР1810ВА86) и 2 (на базе КР1810ВА87) подключают на вход ОЗУ ША и ШД соответственно из магистралей ВМ или ММ.
Арбитр ОЗУ решает конфликты при одновременном обращении к ОЗУ со стороны магистралей ВМ и ММ, пропуская обращения только одного порта и включая соответствующие шинные формирователи адреса и данных. вход со стороны внутриплатной магистрали ВМ — приоритетный.
Дешифратор базового адреса определяет расположение ОЗУ (128Кбайт) в пространстве памяти (1Мбайт) со стороны ВМ и ММ и реализован на «прожигаемом» ПЗУ типа К556РТ5. Кроме того, он по старшим разрядам адресного регистра определяет при каждом обращении к памяти или вводу-выводу, находится ли данная ячейка или порт на плате микроЭВМ или на других платах.
Параллельный интерфейс имеет 24 линии программируемого ввода-вывода и реализован на КР580ВВ55А. Он позволяет передавать в микроЭВМ дискретные сигналы объекта управления и подключать к микроЭВМ графопостроитель, печатающее устройство, программаторы ПЗУ и ПЛМ.
Последовательный интерфейс, реализованный на КР580ВВ51А, обеспечивает межкрейтовые связи между микроЭВМ и позволяет подключать к микроЭВМ телетайпы РТА-6, РТА-7, РТА-8, дисплей 15ИЭ-00-013.
Интервальный таймер расширен и реализован на двух микросхемах КР580ВИ53. Он имеет 6 программно управляемых 16-разрядных счетчиков. Каналы таймера задают скорость обмена информацией по последовательному интерфейсу, реализуют через систему прерывания часы реального времени, могут использоваться для целевых задач пользователя.
Контроллер прерывания имеет 15 входов векторного прерывания и реализован на 2 микросхемах КР1810ВН59А. Входы контроллера и выходы источников прерываний выведены на коммутационное поле штырей, так как источников прерывания в микроЭВМ больше, чем выходов контроллера. Пользователь, изменяя соединения накруткой, может создавать собственные конфигурации системы прерываний. На поле штырей выведены также 15 шин прерывания системной магистрали ММ, выходы таймеров, сигналы готовности последовательного интерфейса, выходы порта «С» параллельного интерфейса.
В программное обеспечение микроЭВМ входит тестовая программа, предназначенная для наладочных работ и приемосдаточных испытаний микроЭВМ. Она работает в интерактивном режиме, используя дисплей или телетайп, присоединяемые к последовательному интерфейсу микроЭВМ.
Тестовые проверки (по функциональному принципу) охватывают основные узлы микроЭВМ. ПЗУ проверяется контрольным суммированием, ОЗУ — тестом чтения-сравнения-записи с учетом контроля по четности, а также тестом двухпортовости (при этом необходима вторая аналогичная микроЭВМ). Отдельно проверяется схема контроля четности ПЗУ и ОЗУ («контроль»). Узел прерывания проверяется совместно с другими микросхемами ввода-вывода (таймерами и параллельным интерфейсом) подачей стимулирующих воздействий и получением соответствующих реакций в виде прерываний. Узел управления межмашинной магистралью и многопроцессорная работа проверяются при наличие второй аналогичной микро ЭВМ и плат внешней оперативной и/или постоянной памяти.
Операционная система реального времени РМС/86 представляет собой многозадачный исполнитель программ и состоит из ядра, программы работы с пультом оператора, дисковой файловой системы и отладчика реального времени.
Отладчик реального времени дает возможность отображать и изменять участки оперативной памяти, отображать системные списки, останавливать отдельные задачи и исполнять процедуры с пульта оператора, не останавливая работу системы.
Программы ОС написаны на языке РL/М-86, а наиболее ответственные части ядра — на языке АSМ86 (время переключения задач — 600…400 мкс).
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Алексеенко А.Г., Галицын А.А., Иванников А. Д. Проектирование радиоэлектронной аппаратуры на микропроцессорах. М.: Радио и связь, 1984.
2. Бойко. Г. М., Власова. В. К. Нормоконтроль оформления дипломного (курсового) проекта (работы). — Балаково. : Ризограф «Print-Fix», 2007. — 52 с.
3. Волочий Б. Ю., Калашников И. Д., Мазепа Р. Б., Мандзий Б. А. Проектирование отказоустойчивых микропроцессорных информа-ционно- измерительных систем — Львов: Виша школа, 1987.
4. Долкарт В. М., Шереметьевский Н. Н. Магистрально-модульные микро-средства управляющей вычислительной техники // Микро-процессорные средства и системы. — 1986 — №1. — с. 28-33.
5. Кобылинский А. В., Москалевский А. Н. Однокристальный высоко-производительный 16-разрядный микропроцессор КМ1810ВМ86 // Микропроцессорные средства и системы. — 1986. — №1 — с. 28-33.
6. Панфилов Д. И., Романенико О. А., Сафашок В. С. Учебная микроЭВМ на основе микропроцессора КМ1810ВМ86 // Микропроцессорные средства и системы. — 1986. — №5 — с. 16-22.
Приложение А
(обязательное)
Графическая часть
1. Функциональная схема микоЭВМ
2. Структурная схема микропроцессора
3. Блок-схема управляющей программы
4. Упрощенная схема микроЭВМ
5. Структурная схемамикроЭВМ ПМВ02