

5.4 Разработка структурной схемы мпс
МикроЭВМ на основе микросхем комплекта К580 строятся по модульному принципу, который обеспечивает подключение к единой магистрали модулей ЦП, ЗУ и УВВ. Магистральная структура связей между модулями минимизирует аппаратуру, уменьшает число схем сопряжения и обеспечивает возможность простого расширения схем.
Структурная схема микроЭВМ на основе МП К1816ВЕ51 приведена на рисунке 24.
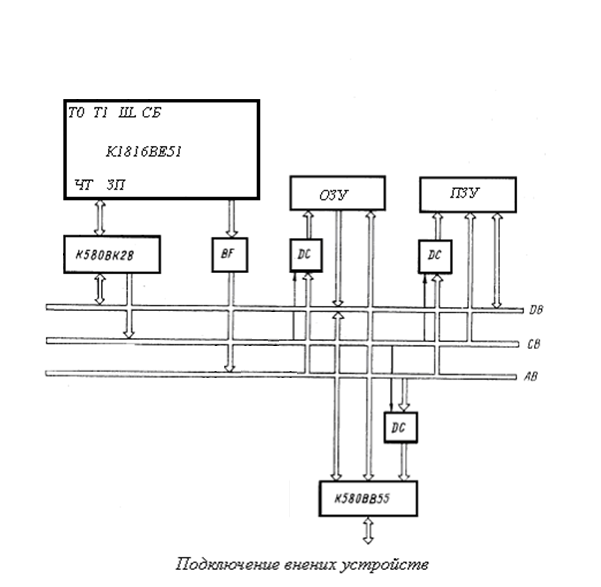
BF– буферный регистр КР580ИР83;DC- контроллер прерываний КР580ВН59; КР580ВВ55 – параллельный интерфейс; К580ВК28 шинный формирователь;DB– шина данных; СВ – шина управления; АВ– шина адреса
Рисунок 24 – Структурная схема микроЭВМ на основе МП К1816ВЕ51
6 Разработка программного обеспечения
Обработка информации от цифровых датчиков производится путем ввода значений х1, х2, х3, х4и вычисления булевой функцииf1(х1, х2, х3, х4)= у1=Х1&Х2&|Х3vХ4
При единичном значении f1вырабатывается управляющий сигнал у1=1 длительностьюt1=10 мкс.
При обработке информации с датчиков ПМ принимает коды NU1,NU2с выходов АЦП и код константы К с регистра пульта управления.
Далее производится вычисление функций у2=NU1-NU2+К и сравнивается с константойQ, которая хранится в ПЗУ. В зависимости от результата сравнения вырабатывается один из двух двоичных управляющих сигналов у2или у3заданной длительности по следующему правилу: еслиNU<Q, то вызывать у2длительностью50мкс, иначе выдать у3длительностью45мкс. Далее производится вычисление у4и результат в виде 8-разрядного кода выдается на вход ЦАП, встроенного в БИС К1816ВЕ51.
Все двоичные переменные и константы рассматриваются как целые без знака.
После выдачи всех управляющих воздействий проверяется состояние тумблера «СТОП» на пульте управления. Если СТОП=0, цикл управления начинается с начала, иначе выполняется процедура останова системы, включающая следующие действия: формируется сигнал установки системы в исходное состояние путем подачи на линию начальной установки интерфейса двух прямоугольных импульсов, выполняется команда СТОП.
Блок схема управления представлена в виде двух циклов.

Рисунок 25– Цикл 1 управляющей программы
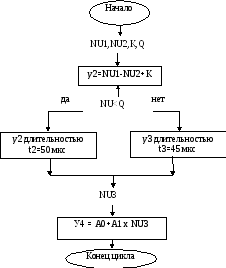
Рисунок 26– Цикл 2 управляющей программы
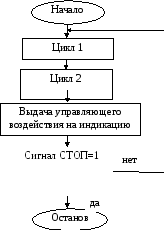
Рисунок 27 – Блок – схема программы управления
Заключение
В результате курсового проектирования в соответствии с заданным вариантом разработана микропроцессорная система на базе микроконтроллера К1816ВЕ51. Разработан процессорный модуль и интерфейс микропроцессорной системы.
В соответствии с техническим заданием разработана подсистема памяти на базе БИС ОЗУ – К565РУ6, БИС ПЗУ – К556РТ5, разработана система ввода/вывода и прерываний.
На основании анализа способов подключения устройств микропроцессорной системы к шинам данных, адреса и управления была построена структурная схема микропроцессорной системы.
Разработана блок–схема управляющей программы управления микропроцессорной системы.
Список используемых источников
1. Горбунов В.Л. Микропроцессоры. Основы построения микроЭВМ/
В.Л. Горбунов, Д.И. Панфилов, Д.Л. Плеснухин. – М.: Высшая школа, 1986.
2.Гуртовцев А.Л. Программы для микропроцессоров: справочное пособие . – Минск: Высшая школа, 1989.
3. Новиков Ю.В. Основы микропроцессорной техники/Ю.В. Новиков, П.К. Скоробогатов. – М.: ИНСТИТУТ.РУ, 2003.
4. Хвощ С.Т. Микропроцессоры и микроЭВМ в системах автоматического управления/ С.Т. Хвощ, Е.А. Попов. – Л.: Машиностроение,1987.
5. http://digitchip.by.ru