

Xlabel('X') % метка оси ox
ylabel('y(x)') % метка оси OY
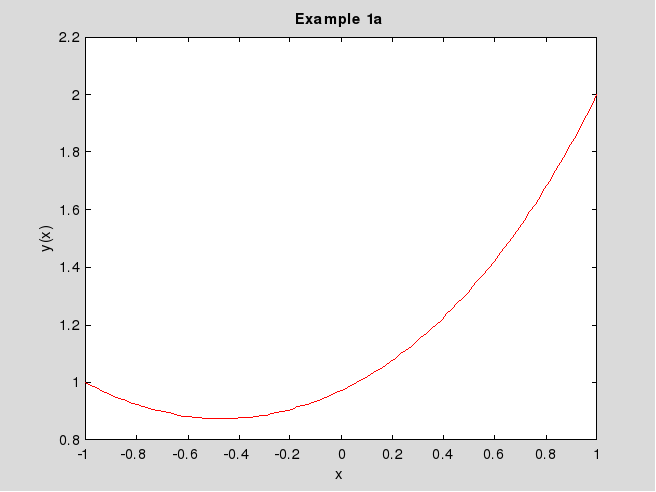
Рис. 1.1. Решение примера 1a
Ответ. Уравнение Эйлера после сокращения на –2 будет:
![]() . (1.0)
. (1.0)
Его аналитическое решение
![]() . (1.0)
. (1.0)
После подстановки значений произвольных постоянных экстремаль функционала (1.6) имеет вид
![]() . (1.0)
. (1.0)
График её показан на рис.1.1. Так как Fyy2>0, и это условие выполняется y(x) и y(x), то в соответствии с достаточным условием Лежандра найденная экстремаль доставляет сильный минимум функционалу (1.6).
-
Пример 1b
Найти экстремаль функционала
![]() (1.0)
(1.0)
Исследовать на выполнение достаточных условий экстремума. Построить график решения.
В этом примере подынтегральная функция F(x,y,y) не зависит явно от y. Первый интеграл уравнения Эйлера имеет вид FyC1. Составим программу для решения этой вариационной задачи. Вначале введём исходные данные.
clear all % очищаем память
format long % формат отображения чисел с 14 знаками
disp('Решаем пример 1b') % выводим заголовок задачи
syms x Dy % описали символические переменные
F=Dy^2+2*Dy*sinh(x)-5*x^2; % вводим подынтегральную функцию
x1=-1; % вводим граничные условия
y1=2;
x2=1;
y2=3;
fprintf('Подынтегральная функция: F=%s\n',char(F))
fprintf('Граничные условия: y(%d)=%d; y(%d)=%d\n',x1,y1,x2,y2)
Решаем пример 1b
Подынтегральная функция: F=Dy^2+2*Dy*sinh(x)-5*x^2
Граничные условия: y(-1)=2; y(1)=3
У нас будет первый интеграл уравнения Эйлера, поэтому ни сама функция y, ни её вторая производная y нам не нужны, и мы их не описываем. Строим первый интеграл и решаем полученное дифференциальное уравнение. Названия констант C1 и C2 используются в команде dsolve, поэтому обозначим константу C.
dFdy1 = simple(diff(F,Dy)) % Fy'
deqEuler = [char(dFdy1) '=C'] % составили уравнение
Sol = dsolve(deqEuler,'x') % решаем уравнение Эйлера
if length(Sol)~=1 % решений нет или более одного
error('Нет решений или более одного решения!');
end
dFdy1 =
2*Dy+2*sinh(x)
deqEuler =
2*Dy+2*sinh(x)=C
Sol =
-cosh(x)+1/2*C*x+C1
В переменной Sol получено общее решение, произвольные постоянные обозначены C и C1. Найдём их. Для этого подставим в Sol граничные точки.
SolLeft = subs(Sol,x,sym(x1)) % подставляем x1
SolRight = subs(Sol,x,sym(x2)) % подставляем x2
SolLeft =
-cosh(1)-1/2*C+C1
SolRight =
-cosh(1)+1/2*C+C1
Приравняем полученные выражения соответственно y1 и y2. Тем самым мы сформируем систему алгебраических уравнений. Решим её. Подставим найденные константы C и C1 в решение Sol.
EqLeft = [char(SolLeft) '=' char(sym(y1))] % приравняли y1
EqRight = [char(SolRight) '=' char(sym(y2))] % приравняли y2
Con = solve(EqLeft,EqRight); % решаем систему уравнений
C=Con.C % присвоили полученные решения
C1=Con.C1 % символическим переменным C и C1
Sol1b = vpa(eval(Sol),14); % подставляем C1, C в решение с точностью 14 знаков
fprintf('Уравнение экстремали:\n%s\n',char(Sol1b))
EqLeft =
-cosh(1)-1/2*C+C1=2
EqRight =
-cosh(1)+1/2*C+C1=3
C =
1
C1 =
cosh(1)+5/2
Уравнение экстремали:
-1.*cosh(x)+.50000000000000*x+4.0430806348152
Дальнейшие действия не отличаются от описанных в примере 1a. Рисуем график и проверяем выполнение достаточных условий экстремума.
xpl = linspace(x1,x2); % массив абсцисс
y1b = subs(Sol1b,x,xpl); % вычисляем ординаты
plot ( xpl, y1b, '-r' ) % рисуем график
title ( '\bfExample 1b' ) % заголовок