

2.2 Автоматический регулятор
Автоматический регулятор – это совокупность устройств, при помощи которых автоматически поддерживается значение регулируемой величины с той или иной точностью по отношению к заданному значению. По роду используемой энергии регуляторы подразделяют на:
-
пневматические;
-
гидравлические;
-
электрические;
-
электрогидравлические.

Зависимость μ = f (σ) в неустановившемся режиме называется законом регулирования регулятора, где σ = (Ттек – Тзад) – сигнал рассогласования, μ – закон перемещения затвора регулирующего органа, t – время. Здесь:
Ттек – текущее значение регулируемого параметра;
Тзад– заданное значение регулируемого параметра.
Динамическая характеристика регулятора как динамического звена рассматривается всегда в следующих координатах:


В зависимости от закона регулирования регулятора бывают линейные и нелинейные.
В настоящее время роль регуляторов выполняют программируемые контроллеры. В них запрограммирован закон регулирования (чаще всего – ПИД закон).
Классификация линейных регуляторов
-
П-регулятор (пропорциональный);
-
И-регулятор (интегральный);
-
ПИ-регулятор (пропорционально-интегральный (изодромный));
-
Регуляторы с предварением (с опережением):
-
ПД-регулятор (пропорционально-дифференциальный);
-
ПИД-регулятор (пропорционально-интегрально-дифференциальный).
Из нелинейных регуляторов самый популярный позиционный регулятор.
Рассмотрим смысл закона регулирования регулятора на примере САР температуры целевого продукта в теплообменнике. Эта схема нам уже известна. Это САР по отклонению. Здесь σ – сигнал рассогласования 90º – 100º = –10 ºС = σ. Закон регулирования регулятора (контроллера) определяет характер перемещения затвора регулирующего органа в новое положение.
На место регулятора (контроллера) в данной схеме будем поочередно ставить линейные регуляторы и будем наблюдать, как регулирующее воздействие μ от каждого закона регулирования влияет на характер перемещения затвора регулирующего органа.

П-регулятор
Это регулятор, у которого μ пропорционально σ, т.е.
μ = – Кσ.
При скачке входной величины σ на значение (–10ºС) затвор регулирующего органа переходит в новое μ - положение скачком (рис.2.10).

Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования (t – время).
Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования.
И-регулятор
Это регулятор, у которого μ пропорционально интегралу σ
![]()
При скачке входной величины на значение (–10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).

Рис.2.11. Закон регулирования И-регулятора.
Достоинство: отсутствие остаточного отклонения регулируемого параметра от заданного значения.
Недостаток: низкая скорость регулирования, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор
Это параллельное соединение предыдущих двух регуляторов (П и И - регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.
 ,
,
где: К, Ти – параметры настройки регулятора. Как видим, формула данного закона – это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону, а оставшуюся часть – медленно по И - закону.

Рис.2.12. Закон регулирования ПИ-регулятора.
Регуляторы с предварением
ПД-регулятор
Это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ/dt, т.е.
![]() .
.

Рис.2.13. Закон регулирования ПД-регулятора.
Производная dσ/dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть в какую сторону и на сколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время.
Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор.
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
 .
.
Здесь: К, Ти, Тд – параметры настройки, которые можно настроить вручную.
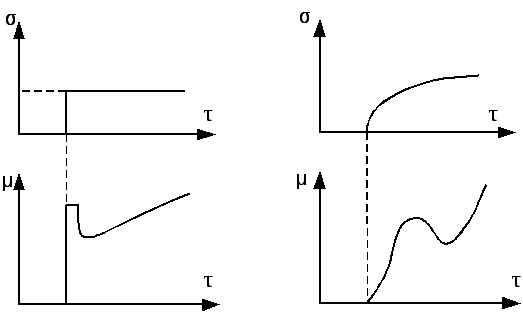
Рис.2.14. Закон регулирования ПИД-регулятора.
ПИД - закон используется во всех контроллерах. Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение (И – закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
Позиционный регулятор
У позиционных регуляторов регулирующее воздействие заставляет затвор срабатывать только при определённых отклонениях регулируемого параметра от заданной величины. Регулирующий орган позиционного регулятора может занимать ограниченное число определенных позиций. Перемещение из одного положения в другое происходит мгновенно. Примером может быть контактная пара (регулирующий орган) для включения ТЭНа в сауне. Регулирующий орган - контактная пара имеет только 2 позиции (вкл., выкл,). Наиболее распространены двухпозиционные регуляторы. При использовании двухпозиционной САР регулируемый параметр совершает незатухающие синусоидальные колебания (рис.2.15.).
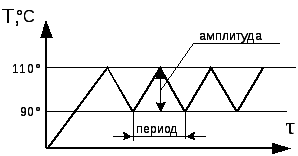
Рис.2.15. Закон регулирования регулятора двухпозиционного регулятора.
Реальность в динамических характеристиках звеньев САР
1. Cкачков не бывает (всё происходит во времени) (см. рис.2.16. ПИД-регулятор).

Рис.2.16. ПИД – закон идеальный и с учётом действия по времени.
2. В графиках нужно учитывать запаздывание (чистое (транспортное) – τ0; ёмкостное - τё ) (см. рис. 2.17).

Рис. 2.17. Динамическая характеристика одноёмкостного объекта
с самовыравниванием с учётом запаздывания.