

3.4 Механическая характеристика асинхронной машины
Электромагнитная мощность (Рэм) (пересекающая воздушный зазор) равна произведению электромагнитного момента (Мэм ) и угловой скорости магнитного поля (0): Рэм = Мэм.0, а механическая мощность - произведению электромагнитного момента (Мэм ) на угловую скорость ротора (): Рмех = Мэм.. Разность между ними равна электрическим потерям в роторе:
Рэм - Рмех = Рэл2, или
Мэм.0 - Мэм. = Мэм.(0 - ).0/0 = Рэм.s = Рэл2 (3.9)
Из (9) следует, что скольжение равно отношению электрических потерь в роторе (Рэл2) к электромагнитной мощности (Рэм):. s = Рэл2/ Рэм, откуда получаем (используя также (5)) формулу для электромагнитного момента асинхронной машины:
Мэм =
Рэл2
/ (s.0)
= m1.I2’2.R2’/(s.0)
=
 (3.10)
(3.10)
Формула (3.10) является базовой при анализе электромеханических свойств асинхронного электропривода. Видно, что момент трехфазной (m1 = 3) является функцией трех переменных – напряжения (U1) и частоты сети (f), а также скольжения s. Кроме того, на момент влияют параметры схемы замещения (R1, R2’ и Lk).
|
|
|

а) б)
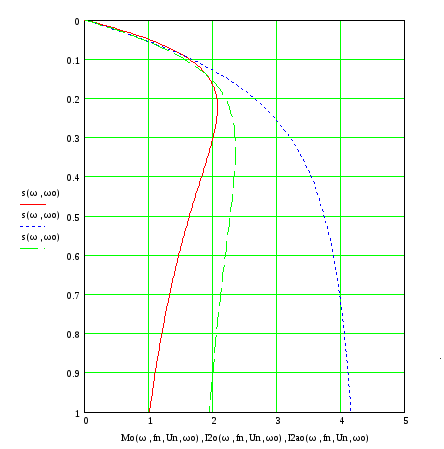
Рис. 3.4 Характеристики асинхронной машины: а) Зависимости (М) и (I2’) для тормозного
( < 0), двигательного (0 < < o) и генераторного (o < ) режимов; б) Зависимости s(M), s(I2’), и s(I2a’) для двигательного режима. Кривая активной составляющей роторного тока показана штриховыми линиями.
На рис.3.4 даны зависимости приведенного тока ротора и электромагнитного момента в функции угловой скорости (0 < < ), построенные для АД типа 4А112М4, имеющего следующие номинальные данные: число фаз m1 = 3; число пар полюсов р = 2 (четырехполюсная машина); мощность (имеется в виду отдаваемая мощность) Рн = 5.5 кВт; номинальный момент Мн = 36.3 Нм; фазные напряжение и ток Uн =220 В, Iн = 11.5; частота сети fн = 50 Гц; активные сопротивления обмоток статора и ротора (приведенное) R1 = 1.24 Ом и R2’ = 0.935 Ом, а также Xk = 3.98 Ом.
Характерные точки механической характеристики s(M): точка идеального холостого хода
(s = 0, = о, М = 0), точка короткого замыкания (s = 1, = 0, М = Мп) и точка критического момента (экстремума) (s = sк , = к, М = Мк).
Важной особенностью механической характеристики (М) асинхронного двигателя является наличие экстремума (перегиба) в критической точке Мк, к и sk. В нашем примере (рис.3.4) критические момент и скорость (в относительных единицах) равны: Мко=2.15 и к= 122 и sk = 0.22.
При уменьшении скорости ниже критической момент падает, несмотря на рост тока. Это объясняется тем, что момент создается не всем током ротора, а только его активной составляющей, которая уменьшается при повышении скольжения и частоты в роторе (см. рис.3.4).
Ниже приведены формулы для расчета Ммах и sk:
 (3.11)
(3.11)
причем здесь знак «+» относится к двигательному режиму, а знак «-» - к генераторному.