

7. Схемы, характеристики и режимы работы дпт
С
Ia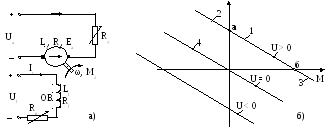 хема
включения двигателя постоянного тока
(ДПТ) с независимым возбуждением приведена
на рис.7.1а
хема
включения двигателя постоянного тока
(ДПТ) с независимым возбуждением приведена
на рис.7.1а
Рис. 7.1 Схема включения (а) и механические характеристики ДПТ
Здесь: Ia и If – токи якоря и обмотки возбуждения; Еа – ЭДС обмотки якоря; – угловая скорость двигателя; М2 – момент на валу двигателя;Rв и Rд – добавочное сопротивление в цепи якоря (оно может отсутствовать); Rа = rа + rдп + rщ – полное активное сопротивление якорной цепи, состоящее из сопротивления обмотки якоря, добавочных полюсов и щеточного контакта; La - индуктивность якорной цепи; Rf и Lf– активное сопротивление и индуктивность обмотки возбуждения
Уравнения, которые описывают электромагнитные и электромеханические процессы в этом двигателе, имеют вид:
![]()
![]()
![]() (7.1)
(7.1)
![]() .
.
Здесь:
![]() - ЭДС
двигателя;
- ЭДС
двигателя;
![]() - электромагнитный момент;
- электромагнитный момент;
![]() ,
С =
,
С =
![]() – постоянная двигателя, p
– число пар полюсов,
– постоянная двигателя, p
– число пар полюсов,
N – число активных проводников в якоре, 2а – число параллельных ветвей обмотки якоря, Ф – магнитный поток, Laf – индуктивность взаимоиндукции обмоток якоря и возбуждения. Индексом «а» отмечены переменные и параметры, относящиеся к обмотке якоря, а индексом «f» - относящиеся к обмотке возбуждения.
При рассмотрении
статических режимов работы, динамическими
составляющими в уравнениях электрического
и механического равновесия (
![]() ,
,
![]() и
и![]() )
пренебрегают, полагая их равными нулю.
Получаем вместо (7.1):
)
пренебрегают, полагая их равными нулю.
Получаем вместо (7.1):
Uа = Eа+ Ia.(Rа+Rd)
Uf = If.Rf (7.2)
М = СΦIa = Мс
Подставляя выражение для Eа уравнение электрического равновесия якорной цепи, получаем формулу для частоты вращения ДПТ - уравнение электромеханической характеристики (I):
= U/(CФ) – Ia.(Ra+Rd)/(CФ) (7.3)
Формулу для механической характеристики (М) получаем, подставляя в (7.3) выражение для тока, полученное из формулы момента (М = C.Ф.Ia):
= U/(CФ) – М.(Ra+Rd)/(CФ)2 (7.4)
Так как момент на валу двигателя М2 несколько меньше (обычно на 4 – 6 %), чем электромагнитный момент М, полученная формула являются в некоторой степени приближенной.
Из (7.3) и (7.4) следуют три способа регулирования скорости двигателя - изменением напряжения U, магнитного потока Ф и добавочного сопротивления в якорной цепи Rд. Выражения (7.3) и (7.4) можно представить в виде = 0 - , где 0 - скорость идеального холостого хода 0 = U/(CФ), а - изменение скорости относительно скорости идеального холостого хода 0.
= 0 - = Ia.(Ra+Rd) / (CФ) = М.(Ra+Rd) / (CФ)2 (7.5)
Вводя понятие относительного изменения скорости ДПТ (аналог скольжения в асинхронных двигателях) = (0 - )/0, получаем:
= (0 - )/0 = Ia.(Ra+Rd)/U. (7.6)
Выражение (7.6) можно сформулировать так: относительное изменение скорости ДПТ равно относительному падению напряжения в цепи якоря.
На рис. 7.1, б показаны механические характеристики (=f(М)) при разных значениях напряжения приложенного к якорю. Электромеханические характеристики (=f(Ia)) имеют аналогичный вид.
Механическая (и соответствующая электромеханическая) характеристика ДПТ с независимым возбуждением при U = 0 (средняя прямая на рис. 7.1, б) называется характеристикой динамического торможения. Электрическую схему для снятия характеристики динамического торможения (рис.7.2) получаем, замыкая якорную цепь двигателя на добавочное сопротивление (или накоротко).
Режимы работы ДПТ зависят от механических (M. и ) и электрических (E. и I) координат, определяющих его механическую P2 = M. и электромагнитную Pэм = E.Ia мощности.
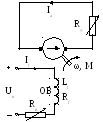
Рис. 7.2 Схема динамического
торможения ДПТ
-
Режим холостого хода имеет место в точке а. Здесь Е U C.Ф.0, M = 0, Ia 0, = 0. Двигатель не получает энергии - ни из электрической сети (за исключением мощности возбуждения и потерь холостого хода) ни с вала;
-
Двигательный режим имеет место на участке 1 (аб) в первом квадранте при 0 < < 0. Здесь и M совпадают по направлению, ЭДС меньше напряжения (Е < U), ток Ia совпадает по направлению с U и направлен навстречу ЭДС;
-
Генераторный режим имеет место во втором квадранте при > 0 . Здесь скорость и момент M направлены встречно, ЭДС больше напряжения Е > U, ток Ia совпадает по направлению с ЭДС и направлен навстречу напряжению U;
-
Режим короткого замыкания имеет место в точке б при = 0 и Е = 0. В этом режиме ток Ia = U / (Ra+Rd), и вся поступающая из сети энергия рассеивается в двигателе и в Rд , а Р2 = 0;
-
Режим торможения противовключением имеет место при < 0. Из–за изменения направления скорости изменяется направление ЭДС, которая теперь совпадает по направлению с напряжением сети. Ток в якоре Iа = (U + E ) / (Ra+Rd).
Вся энергия - как поступающая из сети, так и поступающая с вала, рассеивается в двигателе и добавочном сопротивлении Rд, поэтому рассматриваемый режим в тепловом отношении является весьма напряженным;
-
В режиме динамического торможения ток совпадает по направлению с ЭДС, а мощность, поступающая с вала двигателя, рассеивается в виде тепла на сопротивлениях якорной цепи.