

-
Силовой расчет механизма в 11ом положении.
-
Определение сил полезного сопротивления
 и
и
 (сил давления газов на поршни).
(сил давления газов на поршни).
Согласно данным индикаторных диаграмм находим давление газов на поршни в текущем положении. Методика определения силы полезного сопротивления описана в п. 4.1.1.
Определяем значения сил полезного сопротивления:
![]() ,
,
![]() ,
,
-
Определение сил действующих на звенья механизма.
-
Определяем силы и моменты инерции, действующие на звенья механизма:
![]()
![]()
![]()
![]()
Момент инерции определяется по формуле:
![]()
![]()
-
Определяем веса звеньев механизма:
![]()
![]()
![]()
![]()
-
Вычисляем плечи пар сил.


-
Рассмотрим группу Ассура 2-3.
Прикладываем активные (![]() ,
,
![]() ,
,
![]() ),
инерциальные (
),
инерциальные (![]() ,
,
![]() ),
реактивные (
),
реактивные (![]() ,
,
![]() )
силы и инерциальный момент (
)
силы и инерциальный момент (![]() ),
находи точку качания К (см. п.
4.1.3.).
),
находи точку качания К (см. п.
4.1.3.).
Раскладываем
![]() на составляющие
на составляющие
![]() (направляем по оси шатуна) и
(направляем по оси шатуна) и
![]() (направляем перпендикулярно оси шатуна).
Направление реакции
(направляем перпендикулярно оси шатуна).
Направление реакции
![]() нам известно.
нам известно.
Составив уравнение моментов относительно
точки В, определим
![]() :
:
![]()

Реакции
![]() и
и
![]() находим графически.
находим графически.
Построение силового многоугольника см. п. 4.1.3.
Приняв масштаб сил
![]() ,
определяем величины искомых реакций:
,
определяем величины искомых реакций:
![]()
![]()
![]()
-
Рассмотрим группу Ассура 4-5.
Прикладываем внешние (![]() ,
,
![]() ,
,
![]() ),
инерциальные (
),
инерциальные (![]() ,
,
![]() ),
реактивные (
),
реактивные (![]() ,
,
![]() )
силы и инерциальный момент (
)
силы и инерциальный момент (![]() ).
См. п. 4.1.4.
).
См. п. 4.1.4.
Определяем точку качания К см. п. 4.1.3.
Раскладываем реакцию
![]() ,
на составляющие
,
на составляющие
![]() (направляем по оси шатуна) и
(направляем по оси шатуна) и
![]() (направляем перпендикулярно оси шатуна).
Направление реакции
(направляем перпендикулярно оси шатуна).
Направление реакции
![]() нам известно.
нам известно.
Составив уравнение моментов относительно
точки С, определим
![]() :
:


Реакции
![]() и
и
![]() находим графически. См. п. 4.1.3.
находим графически. См. п. 4.1.3.
Приняв масштаб сил
![]() ,
определяем величины искомых реакций:
,
определяем величины искомых реакций:
![]()
![]()
![]()
-
Рассмотрим ведущее звено.
К точке А ведущего звена прикладываем
найденный ранее реакции
![]() и
и
![]() ,
и приведенную силу
,
и приведенную силу
![]() , в точке О прикладываем реакцию
опоры
, в точке О прикладываем реакцию
опоры
![]() (см п. 4.1.5.)
(см п. 4.1.5.)
Для определения величины
![]() составим уравнение моментов относительно
точки О:
составим уравнение моментов относительно
точки О:
![]()

Реакцию опоры найдем графически (способ построения силового многоугольника см. п. 4.1.3).
Приняв масштаб силы
![]() ,
определяем:
,
определяем:
![]()
-
Построение рычага Жуковского для пятого положения.
Метод построения рычага Жуковского см. п. 4.1.6.
Повернув план скоростей на 90,
прикладываем в характерные точки все
силы, исключая реактивные. Причем силы
![]() и
и
![]() прикладываем в точки качания, которые
находятся из пропорций:
прикладываем в точки качания, которые
находятся из пропорций:
![]()
![]()
Составим уравнение моментов относительно полюса р:


-
Погрешность определения величины приведенных сил, найденных силовым методом и методом Жуковского.

-
Расчет маховика и исследование движения механизма.
5.1. Определим моменты сил сопротивления для каждого положения и строим график Mс=Мс() и строим его в произвольном масштабе М.
![]()
![]()
Рассчитываем для остальных положений и заносим в таблицу
Таблица 5.1 – Расчетная таблица приведенного момента сил сопротивления
|
№ положения |
Давление в правом цилиндре р3, кПа |
РПС3, Н |
VB, м/с |
Движение поршня B |
Давление в левом цилиндре р5, кПа |
РПС5, Н |
VС, м/с |
Движение поршня C |
Мс, Нм |
|
1 |
0 |
0 |
0 |
НМТ |
477 |
5392,01 |
9,97 |
|
-755,03 |
|
2 |
3 |
103,86 |
3,45 |
|
657 |
7426,73 |
10,22 |
|
-1071,02 |
|
3 |
21 |
726,99 |
7,05 |
|
900 |
10173,60 |
6,52 |
|
-1003,61 |
|
4 |
63 |
2180,97 |
9,97 |
|
900 |
10173,60 |
0 |
ВМТ |
-305,4 |
|
5 |
162 |
5608,20 |
10,22 |
|
495 |
5595,48 |
6,52 |
|
-292,6 |
|
6 |
300 |
10385,55 |
6,52 |
|
270 |
3052,08 |
10,22 |
|
-512,94 |
|
7 |
300 |
10385,55 |
0 |
ВМТ |
270 |
3052,08 |
9,97 |
|
427,38 |
|
8 |
114 |
3946,51 |
6,52 |
|
270 |
3052,08 |
7,05 |
|
663,6 |
|
9 |
0 |
0 |
10,22 |
|
270 |
3052,08 |
3,45 |
|
147,89 |
|
10 |
0 |
0 |
9,97 |
|
270 |
3052,08 |
0 |
НМТ |
0 |
|
11 |
0 |
0 |
7,05 |
|
288 |
3255,55 |
3,45 |
|
-157,75 |
|
12 |
0 |
0 |
3,45 |
|
360 |
4069,44 |
7,05 |
|
-402,94 |
По значениям МС строим
график. Принимаем
![]()
-
Интегрируя графически график Мс=Мс() получаем график Ас=Ас().
Метод графического интегрирования описан в п. 2.11.
![]()
-
Считая момент движущих сил постоянной величиной строим график работ движущих сил за цикл АД=АС.
-
Строим график приращения кинетической энергии, вычитая из ординат графика
 соответствующие ординаты графика
соответствующие ординаты графика
 и откладываем разность на соответствующей
точке оси абсцисс. Получаем график
приращения кинетической энергии
и откладываем разность на соответствующей
точке оси абсцисс. Получаем график
приращения кинетической энергии
 .
.
![]()
-
Строим график приведенных моментов инерции.
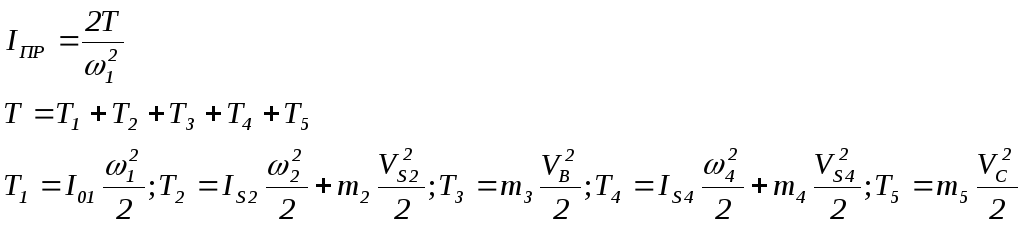
Заносим значения угловых и линейных скоростей в таблицу и рассчитываем IПР для каждого положения
Таблица 5.2. – Приведенный момент инерции
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
T1 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
315,51 |
|
ω2 |
12,56 |
10,96 |
6,43 |
0 |
6,43 |
10,96 |
12,56 |
10,96 |
6,43 |
0 |
6,43 |
10,96 |
|
Vs2 |
3,52 |
3,85 |
4,54 |
5,025 |
4,85 |
4,06 |
3,52 |
4,06 |
4,85 |
5,025 |
4,54 |
3,85 |
|
T2 |
66,73 |
72,36 |
86,94 |
101 |
98,59 |
79,00 |
66,73 |
79 |
98,59 |
101 |
86,94 |
72,36 |
|
Vb |
0 |
1,96 |
3,79 |
5,025 |
4,91 |
3,06 |
0 |
3,06 |
4,91 |
5,025 |
3,79 |
1,96 |
|
T3 |
0 |
19,21 |
71,82 |
126,25 |
120,54 |
46,82 |
0 |
46,82 |
120,54 |
126,25 |
71,82 |
19,21 |
|
ω4 |
0 |
6,43 |
10,96 |
12,56 |
10,96 |
6,43 |
0 |
6,43 |
10,96 |
12,56 |
10,96 |
6,43 |
|
Vs4 |
5,025 |
4,85 |
4,06 |
3,52 |
4,06 |
4,85 |
5,025 |
4,54 |
3,85 |
3,52 |
3,85 |
4,54 |
|
T4 |
101,00 |
98,59 |
79,00 |
66,73 |
79,00 |
98,59 |
101,00 |
86,94 |
72,36 |
66,73 |
72,36 |
86,94 |
|
Vc |
5,025 |
4,91 |
3,06 |
0 |
3,06 |
4,91 |
5,025 |
3,79 |
1,96 |
0 |
1,96 |
3,79 |
|
T5 |
75,75 |
72,32 |
28,09 |
0 |
28,09 |
72,32 |
75,75 |
43,09 |
11,52 |
0 |
11,52 |
43,09 |
|
T |
558,99 |
577,99 |
581,37 |
609,49 |
641,73 |
612,24 |
558,99 |
571,37 |
618,52 |
609,49 |
558,16 |
537,11 |
|
Iпр |
0,44 |
0,46 |
0,46 |
0,48 |
0,51 |
0,49 |
0,44 |
0,45 |
0,49 |
0,48 |
0,44 |
0,43 |
Строим график в масштабе
![]()
-
Строим диаграмму энергомасс.
Сносим соответствующие точки графика
приращения кинетической энергии до
пересечения с графиком приведенного
момента инерции. Соединив последовательно
точки пересечения получим диаграмму
энергомасс в масштабе
![]() и
и
![]() .
.
-
Определяем момент инерции маховика по методу Виттенбауэра.
Определим углы
![]() и
и
![]()

Проводим касательные к верхней и нижней
точкам диагрммы энергомасс под углами
![]() и
и
![]() соответственно до пересечения с осью
соответственно до пересечения с осью
![]() .
Получаем отрезок (ml)
.
Получаем отрезок (ml)
![]()
-
Определяем размеры маховика.
![]()
![]()
![]()
![]() – объемный вес материала маховика
(сталь)
– объемный вес материала маховика
(сталь)
![]()
![]()
-
Определяем истинную угловую скорость.
![]() ,
,
где![]() – абсцисса i-ой
точки
– абсцисса i-ой
точки
![]() – ордината i-ой
точки
– ордината i-ой
точки
![]()

где хmax
и уmax
абсцисса и ордината точки касания
касательной к верхней точке графика,
наклоненной под углом
![]() к горизонтали.
к горизонтали.
Определяем координаты точек и заносим в таблицу.
Таблица 5.3.
Определение истиной угловой скорости
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
yi |
608,40 |
595,43 |
580,98 |
575,11 |
574,02 |
570,78 |
573,54 |
585,74 |
601,88 |
609,61 |
614,11 |
614,29 |
|
xi |
3840,77 |
3846,79 |
3847,86 |
3856,77 |
3866,99 |
3857,65 |
3840,77 |
3844,69 |
3859,64 |
3856,77 |
3840,50 |
3833,83 |
|
ωi |
50,94 |
50,35 |
49,73 |
49,42 |
49,31 |
49,23 |
49,46 |
49,96 |
50,54 |
50,88 |
51,18 |
51,23 |
-
Строим график отклонения угловых скоростей ведущего звена.
![]()
![]()
-
Графическим дифференцированием строим график аналога угловых ускорений ведущего звена в масштабе
![]() .
.
Список используемой литературы
1. Артоболевский И.И. Теория механизмов. – М.: Наука, 1988.-640 с.
2. Теория механизмов и механика машин /А.Н. Мамаев, Т.А. Балабина. – М.: Издательство «Экзамен», 2008. – 254с.
3. Курсовое проектирование по теории механизмов и машин /Под ред. В. Н. Екшибаров, И.В. Левищев. – Барнаул: Изд-во АГАУ, 2008. – 94с.