

5.5 Экспериментальные исследования нагрузок при маневровых соударениях вагонов
 На
полигоне СГУПС проводились испытания
крепления грузов. Для этого использовался
специальный стенд ударных испытаний
по определению нагрузок, действующих
на груз, крепление и вагон при маневровых
соударениях. При этом на грузовом
полувагоне размещались 16 бетонных плит
весом 4,2 тонны, закрепленные системой
тросов. При измерениях использовалась
быстродействующая тензометрическая
система «Динамика-1», сертифицированная
в федеральном агентстве по техническому
регулированию и метрологии (№25487
RU.С.28.007.А)
и зарегистрированная в Государственном
реестре средств измерений под номером
32885-06. В качестве первичных преобразователей
использовалось 16 динамометров, встроенных
в разрывы тросов крепления груза на
вагоне. Схема расположения динамометров
приведена на рисуноке 5.6.
Для измерения ускорений на грузе были
закреплены шесть акселерометров. К
одному из каналов измерительной системы
«Динамика-1» подключен датчик скорости.
На
полигоне СГУПС проводились испытания
крепления грузов. Для этого использовался
специальный стенд ударных испытаний
по определению нагрузок, действующих
на груз, крепление и вагон при маневровых
соударениях. При этом на грузовом
полувагоне размещались 16 бетонных плит
весом 4,2 тонны, закрепленные системой
тросов. При измерениях использовалась
быстродействующая тензометрическая
система «Динамика-1», сертифицированная
в федеральном агентстве по техническому
регулированию и метрологии (№25487
RU.С.28.007.А)
и зарегистрированная в Государственном
реестре средств измерений под номером
32885-06. В качестве первичных преобразователей
использовалось 16 динамометров, встроенных
в разрывы тросов крепления груза на
вагоне. Схема расположения динамометров
приведена на рисуноке 5.6.
Для измерения ускорений на грузе были
закреплены шесть акселерометров. К
одному из каналов измерительной системы
«Динамика-1» подключен датчик скорости.

Рисунок 5.6 – Схема расположения динамометров на вагоне
Тросы перед натяжением ослабляются и снимаются нулевые показания динамометра, при необходимости нуль подстраивается. Тросы натягивают равномерно в пределах (1,5 – 2,0) тонн.
 После
подготовки оборудования и закрепления
груза системой тросов производились
следующие действия. С помощью электролебедки
вагон поднимали на горку до определенной
отметки, где колеса фиксировались с
помощью ломиков (рисунок 5.7). По команде
руководителя испытаний вагон спускался
с горки и с развившейся скоростью
врезался в бетонную стену
После
подготовки оборудования и закрепления
груза системой тросов производились
следующие действия. С помощью электролебедки
вагон поднимали на горку до определенной
отметки, где колеса фиксировались с
помощью ломиков (рисунок 5.7). По команде
руководителя испытаний вагон спускался
с горки и с развившейся скоростью
врезался в бетонную стену
(рисунок 5.8). Одновременно с этим запускалась система на запись измерения (рисунок 5.9). После этого результаты записывались на диск и отправлялись на обработку.

Рисунок 5.7 – Процесс поднятия полувагона на горку


Рисунок 5.8 – Столкновение полувагона с бетонной стеной на полигоне СГУПС

Рисунок 5.9 – Система обработки даных
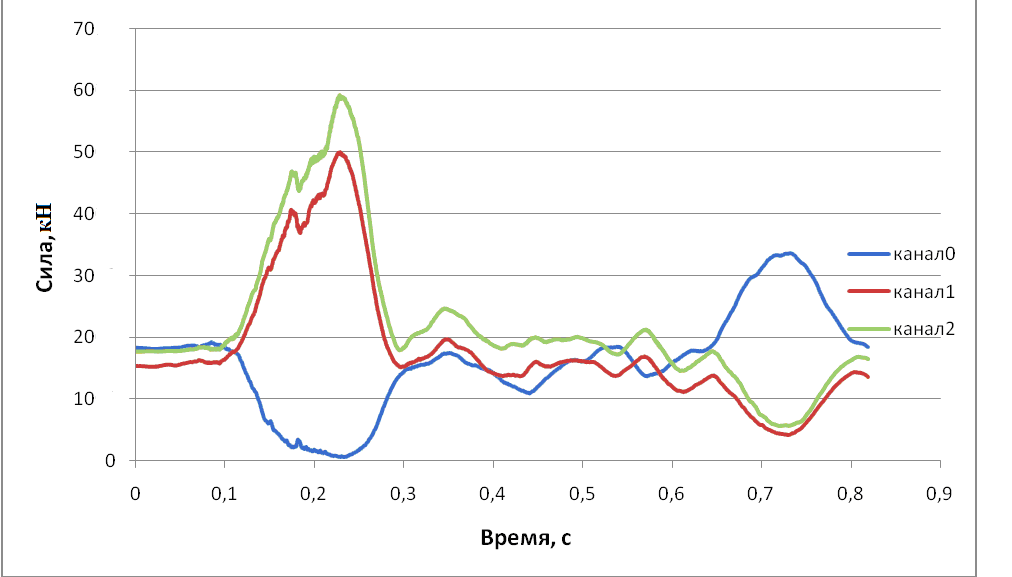
Рисунок 5.10 – Изменения усилия натяжения тросов при ударе вагона от времени
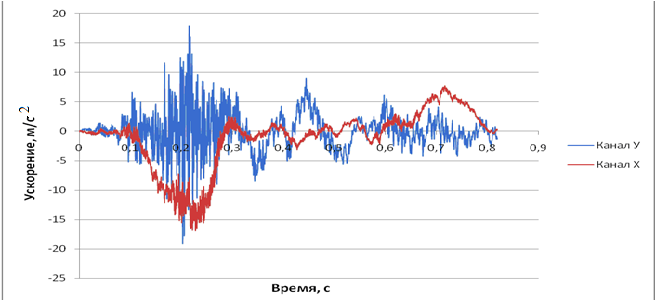
Рисунок 5.11 – Изменения ускорений при ударе вагона от времени
Основные технические характеристики тензометрической системы
 «Динамика-1»:
«Динамика-1»:
Схемы включения датчиков:
- параметрические датчики включаются по 4-х проводной схеме;
- генераторные датчики включаются по 2-х проводной схеме.
Число измерительных каналов………………………………………………….20
Комплекс обеспечивает адресный опрос датчиков.
Комплекс работает по управлению от компьютера
На четверку каналов подключаются только однотипные датчики……….
Быстродействие на канал, кГц/ кан...………………………………….... ……20
Время преобразования информативного параметра датчика в код
результата измерения, мкс………………………………………………..…>= 50
Измерение по схеме «одиночный тензодатчик»
Номинальное значение сопротивления тензорезистивного датчика
выбирается из диапазона, Ом………………………………………..…(20…400)
Минимальный диапазон изменения сопротивления тензодатчика,
Ом………………………………………………………………………………± 1,5
Максимальная разрешающая способность, мОм/дел………………….…. 0,487
Максимальный диапазон изменения сопротивления тензорезисторного
датчика, Ом…………………………………………………………...………. ± 12
Предел допускаемой погрешности измерительного канала при измерении
по схеме «одиночный тензодатчик», %.......................................................…. 0,5
Ток питания тензодатчиков, мА…………………………………………(10…50)
Частотный диапазон при неравномерности амплитудно-частотной характеристики 3 дБ, Гц…………………………………………..…….(0…1000)
Пределы основной допускаемой относительной погрешности
измерений %......................................................................................................± 0,5
Основная погрешность (на частоте 1000 Гц), %..............................................1,0
Измерение по схеме «мост»
Максимальный диапазон изменения выходного напряжения термоэлектри-
ческих преобразователей, мВ…………………………………………………... 125
 Предел
допускаемой погрешности измерительного
канала при измерении
Предел
допускаемой погрешности измерительного
канала при измерении
по схемам: «одиночный тензодатчик», «термопреобразователь», «мост», %.......................................................................................................................…. 0,5
Длина линий связи от комплекса до датчика, м………………..…………...≤ 10
Длина линий связи от комплекса до компьютера, м………….…………… ≤ 50
Общее сопротивление соединительных проводов с термоэлектрическим преобразователем, Ом……………………………………………………… ≤ 300
Общее сопротивление каждого провода, подключающего пассивные
датчики, Ом……………………………………………………………………. ≤ 8
Электрическое питание комплекса осуществляется от внешнего источника
переменного тока, В ……………….……………………………...….. 220 или 36
Время установления рабочего режима (время прогрева), мин…………........ 30
Габаритные размеры не более, мм………………………………(530х310х190)
Масса, кг……………………………………………………………………… ≤ 4,5
 Мощность,
потребляемая комплексом, В · А…………………………….
…≤ 40
Мощность,
потребляемая комплексом, В · А…………………………….
…≤ 40