

1.3. Скорость
Для характеристики движения материальной точки вводится векторная величина – скорость, которой определяется как быстрота движения, так и его направление в данный момент времени.
Пусть
материальная точка движется по какой-либо
криволинейной траектории так, что в
момент времени
![]() ей соответствует радиус-вектор
ей соответствует радиус-вектор
![]()
![]() (рис. 1.11). В течение малого промежутка
времени ∆
(рис. 1.11). В течение малого промежутка
времени ∆![]() точка пройдет путь ∆s
и получит элементарное (бесконечно
малое) перемещение
точка пройдет путь ∆s
и получит элементарное (бесконечно
малое) перемещение
![]() .
.
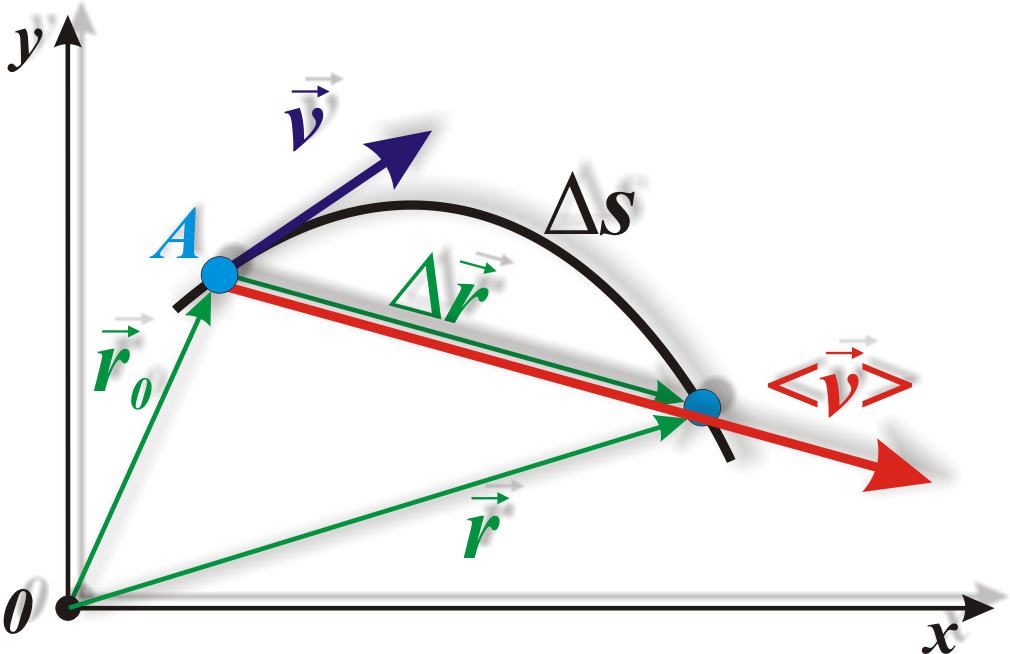
Рис.
1.11.
Вектор
скорости
![]() направлен
по касательной
направлен
по касательной
к
траектории, вектор средней скорости
<![]() >
направлен
>
направлен
по
вектору перемещения
![]()
Вектором
средней скорости
<![]() >
называют отношение приращения
радиус-вектора точки
>
называют отношение приращения
радиус-вектора точки
![]() к промежутку времени ∆
к промежутку времени ∆![]() :
:
<![]() >=
>=![]() .
(1.3)
.
(1.3)
Направление
вектора средней скорости совпадает с
направлением
![]() .
При неограниченном уменьшении ∆
.
При неограниченном уменьшении ∆![]() средняя скорость стремится к предельному
значению, которое называется мгновенной
скоростью
средняя скорость стремится к предельному
значению, которое называется мгновенной
скоростью![]() :
:
![]() =
=![]()
![]() .
(1.4)
.
(1.4)
Мгновенная
скорость, таким образом, есть векторная
величина, равная первой производной
радиуса вектора движущейся точки по
времени. Вектор скорости
![]() направлен
по касательной к траектории в сторону
движения (рис. 1.11). По мере уменьшения
∆
направлен
по касательной к траектории в сторону
движения (рис. 1.11). По мере уменьшения
∆![]() путь ∆s
все больше будет приближаться к |
путь ∆s
все больше будет приближаться к |![]() |,
поэтому
модуль мгновенной скорости равен
|,
поэтому
модуль мгновенной скорости равен
![]() =
|
=
|![]() |
=
|
=
![]() , (1.5)
, (1.5)
т.е. модуль мгновенной скорости равен первой производной пути по времени.
Используя
единичные вектора
![]() ,
вектор
,
вектор
![]() можно
разложить на три составляющие по осям
прямоугольной декартовой системы
координат:
можно
разложить на три составляющие по осям
прямоугольной декартовой системы
координат:
![]() =
=![]()
![]() ,
(1.6)
,
(1.6)
причем,
согласно (1.4)
![]() =
=![]() ,
,
![]() =
=
![]() ,
,
![]() =
=
![]()
![]() =
=![]() .
(1.7)
.
(1.7)
При
описании плоского движения, когда
траектория является плоской кривой,
т.е. такой кривой, все точки которой
лежат в одной плоскости, вектор скорости
![]() представляют
в виде суммы двух составляющих (рис.
1.12):
представляют
в виде суммы двух составляющих (рис.
1.12):
![]() =
=
![]() (1.8)
(1.8)

Рис.
1.12.
Вектор
![]() представлен в виде
представлен в виде
суммы
двух составляющих:
![]() и
и
![]()
Первая составляющая равна:
![]()
![]()
![]() .
(1.9)
.
(1.9)
Она
направлена вдоль радиус-вектора
![]() и характеризует быстроту изменения
модуля
и характеризует быстроту изменения
модуля
![]()
Вторая составляющая равна:
![]() =
r
=
r![]()
![]() .
(1.10)
.
(1.10)
Эта
составляющая характеризует быстроту
изменения радиусавектора по направлению,
она связана с изменением угла
![]()
Векторы
![]()
![]() – единичные векторы.
– единичные векторы.
Векторы
![]() и
и
![]() взаимно перпендикулярны. Следовательно,
взаимно перпендикулярны. Следовательно,
![]() =
= (1.11)
(1.11)
Если
направление вектора
![]() скорости
точки не изменяется, то траектория точки
прямая линия, т.е. прямолинейное
движение.
В случае криволинейного
движения
точки направление ее скорости непрерывно
изменяется.
скорости
точки не изменяется, то траектория точки
прямая линия, т.е. прямолинейное
движение.
В случае криволинейного
движения
точки направление ее скорости непрерывно
изменяется.
При
равномерном
движении
точки остается постоянной ее скорость
![]() ,
а путь, пройденный точкой за промежуток
времени от
,
а путь, пройденный точкой за промежуток
времени от
![]() до
до
![]() +∆
+∆![]() ,
∆s
=
,
∆s
=
![]() ·∆
·∆![]() .
В этом случае, точка проходит за равные
промежутки времени пути равной длины.
Кинематическое уравнение можно записать
и так s=s0+v(t-t0),
где s0
– путь в
момент времени t0..
Если
точка движется равномерно и прямолинейно
со скоростью
.
В этом случае, точка проходит за равные
промежутки времени пути равной длины.
Кинематическое уравнение можно записать
и так s=s0+v(t-t0),
где s0
– путь в
момент времени t0..
Если
точка движется равномерно и прямолинейно
со скоростью
![]() вдоль оси
вдоль оси
![]() ,
то зависимость ее координаты
,
то зависимость ее координаты
![]() от времени имеет вид:
от времени имеет вид:
![]() ,
где
,
где
![]()
значение
значение
![]() в начальный момент времени(
в начальный момент времени(![]() =0),
а
=0),
а
![]() − проекция скорости точки на ось
− проекция скорости точки на ось
![]() .
.
Если
модуль вектора скорости точки изменяется
с течением времени, т. е
![]() =f(
=f(![]() )
или просто
)
или просто
![]() (
(![]() ),
то такое движение точки называется
неравномерным.
Неравномерное
движение точки называется ускоренным,
если в процессе движения модуль скорости
точки увеличивается, т.е. (
),
то такое движение точки называется
неравномерным.
Неравномерное
движение точки называется ускоренным,
если в процессе движения модуль скорости
точки увеличивается, т.е. (![]() )
>0. Если (
)
>0. Если (![]() )
<0, то движение точки называется
замедленным.
Путь, пройденный материальной точкой
за промежуток времени от
)
<0, то движение точки называется
замедленным.
Путь, пройденный материальной точкой
за промежуток времени от
![]() до
до
![]() равен:
равен:
ds
=
![]() (
(![]() )
)![]() .
(1.12)
.
(1.12)
Проинтегрировав
по времени, найдем длину пути, пройденного
точкой за промежуток времени от
![]() до
до
![]() :
:
S= .
(1.13)
.
(1.13)
График
зависимости
![]() от
от
![]() показан на рис. 1.13. Пройденный путь можно
представить как площадь фигуры,
ограниченной кривой
показан на рис. 1.13. Пройденный путь можно
представить как площадь фигуры,
ограниченной кривой
![]() (
(![]() ),
осью
),
осью
![]() и прямыми
и прямыми
![]() =
=![]() и
и
![]() =
=![]() .
.

Рис.
1.13.
Путь,
пройденный за время с момента
![]()
до
момента
![]() ,
численно равен площади фигуры
,
численно равен площади фигуры
![]() АВ
АВ![]()
При
стремлении всех
![]() к нулю ширина полосок убывает (одновременно
число их растет), и ломаная линия в
пределе сольется с кривой
к нулю ширина полосок убывает (одновременно
число их растет), и ломаная линия в
пределе сольется с кривой
![]() =
=
![]() (
(![]() ).
Таким образом, путь, пройденный за время
с момента
).
Таким образом, путь, пройденный за время
с момента
![]() до момента
до момента
![]() ,
численно равен площади, ограниченной
графиком функции
,
численно равен площади, ограниченной
графиком функции
![]() =
=
![]() (
(![]() ),
осью времени
),
осью времени
![]() и прямыми
и прямыми
![]() =
=![]() и
и
![]() =
=![]() .
.
Заметим,
что среднее значение модуля скорости
за время
![]() до
до
![]() равно
равно
 (1.14)
(1.14)
аналогично
<
![]() > =
> = .
(1.15)
.
(1.15)