

8.2. Механические гармонические колебания
Пусть материальная точка совершает прямолинейные гармонические колебания вдоль оси координат х около положения равновесия, принятого за начало координат. Тогда зависимость координаты Х от времени t задается уравнением, аналогичным уравнению (8.1):
![]() .
(8.7)
.
(8.7)
Согласно выражениям
(8.4) и (8.5), скорость
![]() и ускорение
и ускорение
![]() колеблющейся точки соответственно
равны
колеблющейся точки соответственно
равны
![]()
(8.8)
![]() .
.
Сила
![]() ,
действующая на колеблющуюся материальную
точку массой m,
с учетом (8.7) и (8.8) равна
,
действующая на колеблющуюся материальную
точку массой m,
с учетом (8.7) и (8.8) равна
![]() .
.
Следовательно, сила пропорциональна смещению материальной точки из положения равновесия и направлена в противоположную сторону (к положению равновесия).
Кинетическая энергия материальной точки, совершающей прямолинейные гармонические колебания, равна
 (8.9)
(8.9)
или
 .
(8.10)
.
(8.10)
Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы F, равна
 (8.11)
(8.11)
или
 .
(8.12)
.
(8.12)
Сложив (8.9) и (8.11), получим формулу для полной энергии:
 .
(8.13)
.
(8.13)
Полная энергия остается постоянной, так как при гармонических колебаниях справедлив закон сохранения механической энергии, поскольку упругая сила консервативна.
Из формул (8.10) и
(8.12) следует, что Т и П изменяются с
частотой 2![]() ,
т.е. с частотой, которая в два раза
превышает частоту гармонического
колебания. На рис. 8.2 представлены графики
зависимости Х, Т и П от времени. Поскольку
,
т.е. с частотой, которая в два раза
превышает частоту гармонического
колебания. На рис. 8.2 представлены графики
зависимости Х, Т и П от времени. Поскольку
![]() ,
то из формул (8.9), (8.11) и (8.13) следует, что
,
то из формул (8.9), (8.11) и (8.13) следует, что
![]() .
.
8.3. Гармонический осциллятор. Пружинный, математический
и физический маятники
Гармоническим осциллятором называется система, совершающая колебания, описываемые уравнением вида:
![]() .
.
Колебания гармонического осциллятора являются важным примером периодического движения и служат точкой или приближенной моделью во многих задачах классической и квантовой физики. Примерами гармонического осциллятора являются пружинный, математический и физический маятники.
1. Пружинный маятник – это груз, массой m, подвешенной на абсолютно упругой пружине и совершающей гармонические колебания под действием упругой силы.
Рассмотрим систему,
состоящую из шарика массы m,
подвешенного на упругой пружине (рис.
8.3). В состоянии равновесия сила mg
уравновешивается упругой силой
![]() :
:
![]() .
(8.14)
.
(8.14)
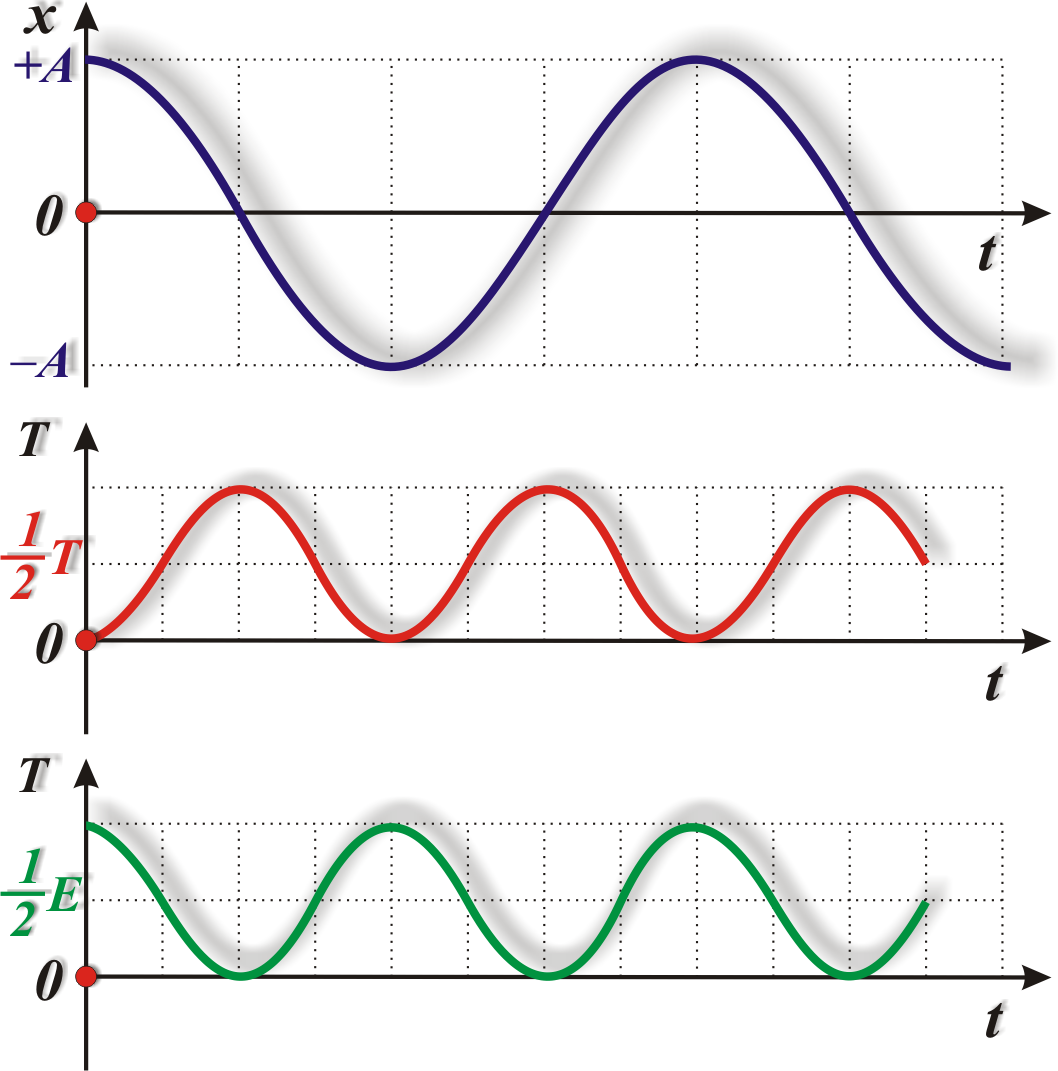
Рис. 8.2. Графики зависимости смещения, кинетической
и потенциальной энергии от времени при гармонических колебаниях
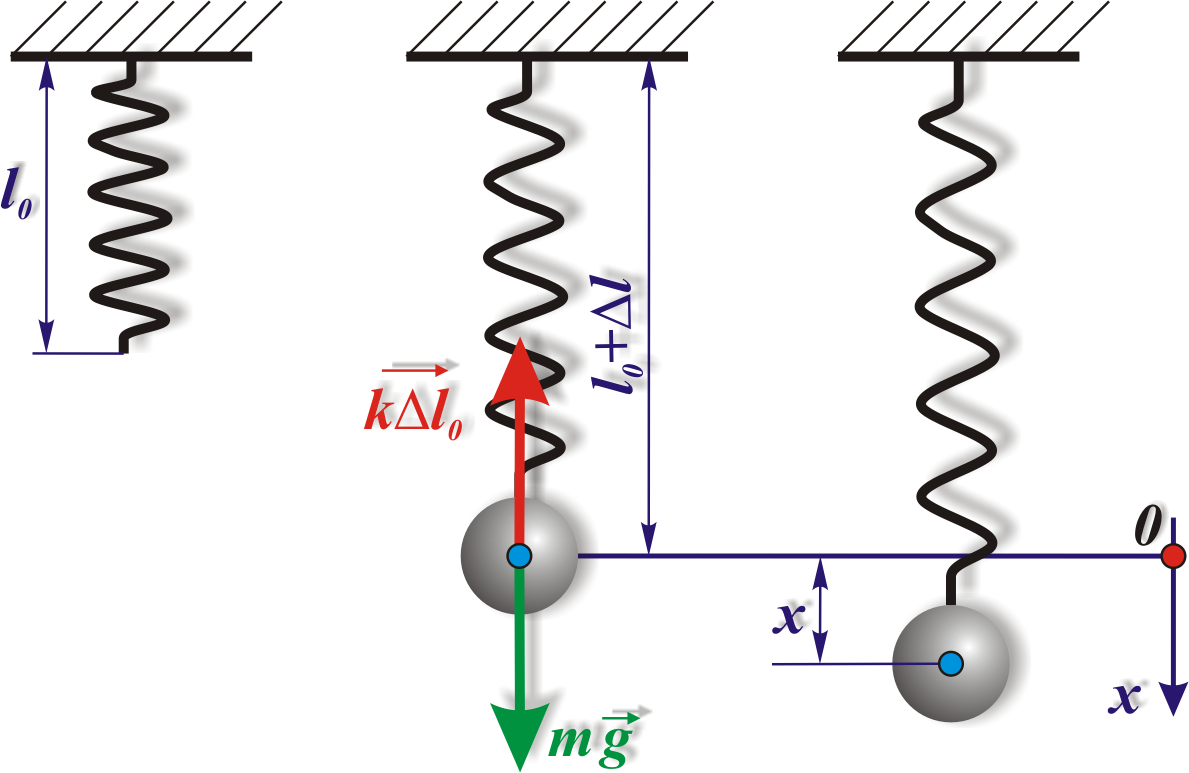
Рис. 8.3. Пружинный маятник
Будем характеризовать смещение шарика из наложения равновесия координатой х, причем ось х направим по вертикали вниз, а нуль оси совместим с положением равновесия шарика.
Если сместить
шарик от положения равновесия на
расстояние, равное х,
то удлинение пружины станет равным
![]() и проекция, результирующей силы на ось
х
(обозначим эту проекцию буквой f)
примет значение
и проекция, результирующей силы на ось
х
(обозначим эту проекцию буквой f)
примет значение
![]() .
.
Учитывая условие равновесия (8.14), получим, что
![]() .
(8.15)
.
(8.15)
Знак «–» в формуле (8.15) отражает то обстоятельство, что смещение и сила имеют противоположные направления: если шарик смещен из положения равновесия вниз (х > 0), сила направлена вверх (f < 0), при смещении шарика вверх (х < 0), то сила направлена вниз (f > 0). Таким образом, сила f обладает следующими свойствами: 1) она пропорциональна смещению шарика из положения равновесия, 2) она всегда направлена к положению равновесия.
В рассмотренном
примере сила (8.15) по своей природе
упругая. Если сила не является по своей
природе упругой, но подчиняется закону
![]() ,
то она называется квазиупругой
силой.
,
то она называется квазиупругой
силой.
Уравнение второго закона Ньютона для пружинного маятника имеет вид
![]()
или
![]() . (8.16)
. (8.16)
Уравнение (8.16) является дифференциальным уравнением колебаний пружинного маятника. Решение уравнения (8.16) можно записать в виде:
![]()
Обозначим в уравнении (8.16)
![]() .
.
Учитывая формулу (8.2), период колебаний пружинного маятника:
 .
(8.17)
.
(8.17)
2. Математический маятник – это идеализированная система, состоящая из материальной точки массой m, подвешенной на нерастяжимой невесомой нити, и колеблющаяся под действием силы тяжести. Хорошим приближением математического маятника является небольшой тяжелый шарик, подвешенный на тонкой длинной нити.
Отклоним маятник от положения равновесия угол a (рис. 8.4).
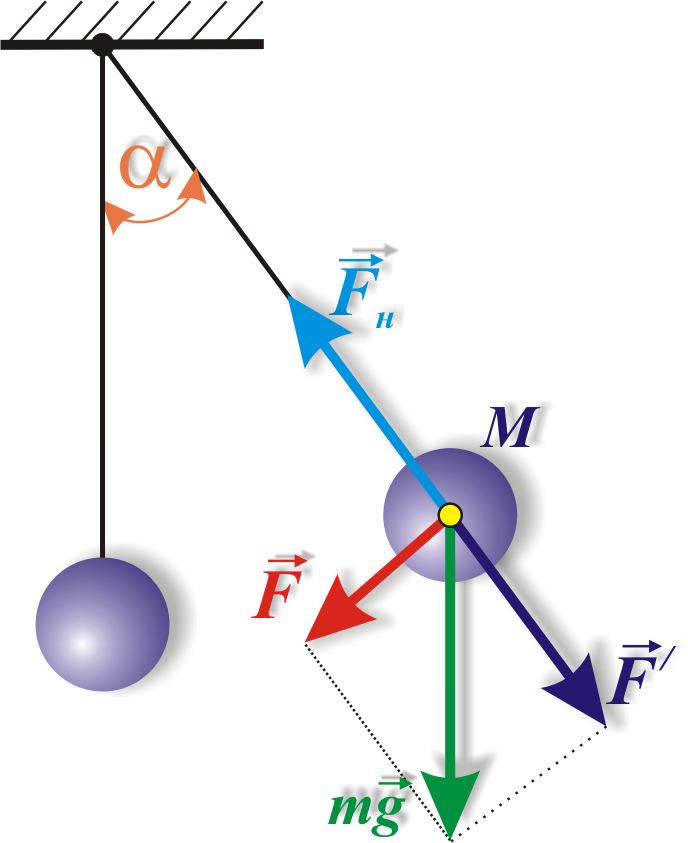
Рис. 8.4. Математический маятник
Разложим мысленно силу тяжести mg, действующую на точку М, на две составляющие F/ и F, направленные соответственно вдоль нити и перпендикулярно к ней. Сила F/ = mgcosa будет растягивать нить и уравновесится натяжением нити Fн. Неуравновешенной останется составляющая силы F = mg sin a. Таким образом, на точку М всегда будет действовать две силы mg и Fн, направленные под углом (p – a) друг к другу. Равнодействующей этих сил по правилу параллелограмма будет сила F = mg sin a, направленная по касательной к дуге ОМ в сторону точки О. Когда груз придет в наинизшее положение, т.е. в т. О, силы mg и Fн полностью уравновесятся. Таким образом, точка О есть положение равновесия груза m. Обозначим отрезок дуги ОМ, характеризующий путь, пройденный точкой М из положения равновесия, через х и будем считать угол a и величину х положительными при отклонении нити с грузом вправо от вертикали и отрицательными – при отклонении влево. Угол a, измеряемый в радианах, численно равен отношению длины дуги х, на которую он опирается, к радиусу окружности l. Тогда (с учетом направления) сила F, действующая на точку М, может быть выражена в виде
![]() .
(8.18)
.
(8.18)
Для малых углов отклонения от вертикали, не превышающих 5-6° с достаточной степенью точности можно заменить sina углом a (в радианах). Тогда сила, действующая на точку М, будет равна
![]() .
(8.19)
.
(8.19)
Обозначим
![]() ,
тогда получим
,
тогда получим
![]() .
Видим, что результирующая сила F,
действующая на математический маятник,
находящийся в поле земного тяготения
меняется подобно упругой силе, по своей
природе она не является упругой и
называется квазиупругой.
.
Видим, что результирующая сила F,
действующая на математический маятник,
находящийся в поле земного тяготения
меняется подобно упругой силе, по своей
природе она не является упругой и
называется квазиупругой.
По второму закону Ньютона:
 .
(8.20)
.
(8.20)
Из (8.19) и (8.20) получаем:

или
 . (8.21)
. (8.21)
Уравнение (8.21) является дифференциальным уравнением колебаний математического маятника.
Решение (8.21) можно записать в виде:
![]()
Обозначим в уравнении (8.21)
![]() .
(8.22)
.
(8.22)
Учитывая, что
 .
(8.23)
.
(8.23)
Период колебаний математического маятника равен:
 .
(8.24)
.
(8.24)
Из формулы (8.24) видно, что период колебаний математического маятника не зависит от амплитуды (при малых углах) и не зависит от массы маятника.
3. Физический маятник – это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси подвеса, проходящей через точку О, несовпадающей с центром масс тела (рис. 8.5).
Если маятник отклонен из положения равновесия на некоторый угол a, то в соответствии с уравнением динамики вращательного движения твердого тела, момент М возвращающей силы можно записать в виде
![]() ,
(8.25)
,
(8.25)
где I0 – момент инерции маятника относительно оси, проходящей через точку подвеса О.
С другой стороны момент силы M определяется
![]() , (8.26)
, (8.26)
т.к.
![]() (соответствует малым колебаниям
маятника), получим:
(соответствует малым колебаниям
маятника), получим:
![]() .
(8.27)
.
(8.27)

Рис. 8.5. Физический маятник
Вращательный момент имеет такое направление, что стремится вернуть маятник в положение равновесия, и аналогичен в этом отношении квазиупругой силе. Поэтому моменту М и угловому смещению j нужно приписывать противоположные знаки
![]() .
(8.28)
.
(8.28)
Угловое ускорение равно:
 .
(8.29)
.
(8.29)
Подставив (8.29) в (8.25) и учитывая (8.28) получим:
 .
(8.30)
.
(8.30)
После преобразований получим:
 .
(8.31)
.
(8.31)
Уравнение (8.31) является дифференциальным уравнением колебаний физического маятника.
Решение уравнения (8.31) можно записать в виде:
![]()
Обозначим в уравнении (8.31)
 .
(8.32)
.
(8.32)
Учитывая, что
 ,
найдем период колебаний физического
маятника, как:
,
найдем период колебаний физического
маятника, как:
 .
(8.33)
.
(8.33)
В уравнении (8.33) обозначим
![]() ,
(8.34)
,
(8.34)
которая называется приведенной длиной физического маятника.
Точка О/ на продолжении прямой ОС, отстоящая от точки О подвеса маятника на расстоянии приведенной длины L, называется центром качания физического маятника (рис. 8.5). Применяя теорему Штейнера, получим
 ,
,
т.е. ОО/ всегда больше ОС. Точка подвеса О маятника и центр качаний О/ обладают свойством взаимозаменяемости. Если точку подвеса перенести в центр качаний, то прежняя точка О подвеса станет новым центром качаний, и период колебаний физического маятника не изменится.