

-
Графическое представление энергии.
Условия равновесия механических систем
График зависимости потенциальной энергии от некоторого аргумента называется потенциальной кривой. Анализ потенциальных кривых позволяет определить характер движения тела.
Рассмотрим консервативные системы, т.е. системы, в которых взаимные превращения механической энергии в другие виды отсутствуют. Представим графически потенциальную энергию тела в однородном поле тяжести и энергию упругодеформированного тела.
Потенциальная энергия тела массой m, поднятого на высоту h над поверхностью Земли П(h)=mgh. График данной зависимости П=П(h) – прямая линия, проходящая через начало координат (рис. 3.2), угол наклона которой к оси h тем больше, чем больше масса тела (так как tg=mg).
Пусть полная энергия тела равна Е (ее график – прямая, параллельная оси h). На высоте h1 (отмеченной на оси h) тело обладает потенциальной энергией П, которая определяется отрезком вертикали (на рис. 3.2 отрезок П показан вертикальной стрелкой), тогда кинетическая энергия Т задается отрезком, заключенным между прямой Е и графиком П(h). Из графика следует, что если h=hmax, то Т=0 и П=Е=mghmax, т.е. потенциальная энергия становится максимальной и равной полной энергии.

Рис. 3.2. Графическое представление потенциальной энергии
для тела в однородном поле тяжести
По графику на рис. 3.2 можно найти скорость тела на высоте h:
Т=Е–П,
т.е.
![]() ,
,
откуда
![]() .
.
Зависимость
потенциальной энергии упругой деформации
П=![]() от деформации х
(х
– смещение пружины от положения
равновесия х0)
имеет вид параболы (рис. 3.3), где график
заданной полной энергии тела Е
– прямая, а значения Т и П (показаны
вертикальными стрелками) определяются
так же, как на рис. 3.2. Из рис. 3.3 следует,
что с возрастанием деформации х
потенциальная энергия тела возрастает,
а кинетическая – уменьшается. Кинетическая
энергия в свою очередь может возрастать
только за счет уменьшения потенциальной
энергии. Абсцисса хmax
определяет максимально возможную
деформацию растяжения пружины, а –
хmax
–
максимально возможную деформацию сжатия
пружины. При х=
хmax
потенциальная энергия становится
максимальной и равной полной энергии.
Пружина (тело) не может сместиться левее
–хmax
или правее хmax,
в этом случае
говорят, что тело находится в потенциальной
яме с координатами –хmax
х
хmax.
от деформации х
(х
– смещение пружины от положения
равновесия х0)
имеет вид параболы (рис. 3.3), где график
заданной полной энергии тела Е
– прямая, а значения Т и П (показаны
вертикальными стрелками) определяются
так же, как на рис. 3.2. Из рис. 3.3 следует,
что с возрастанием деформации х
потенциальная энергия тела возрастает,
а кинетическая – уменьшается. Кинетическая
энергия в свою очередь может возрастать
только за счет уменьшения потенциальной
энергии. Абсцисса хmax
определяет максимально возможную
деформацию растяжения пружины, а –
хmax
–
максимально возможную деформацию сжатия
пружины. При х=
хmax
потенциальная энергия становится
максимальной и равной полной энергии.
Пружина (тело) не может сместиться левее
–хmax
или правее хmax,
в этом случае
говорят, что тело находится в потенциальной
яме с координатами –хmax
х
хmax.
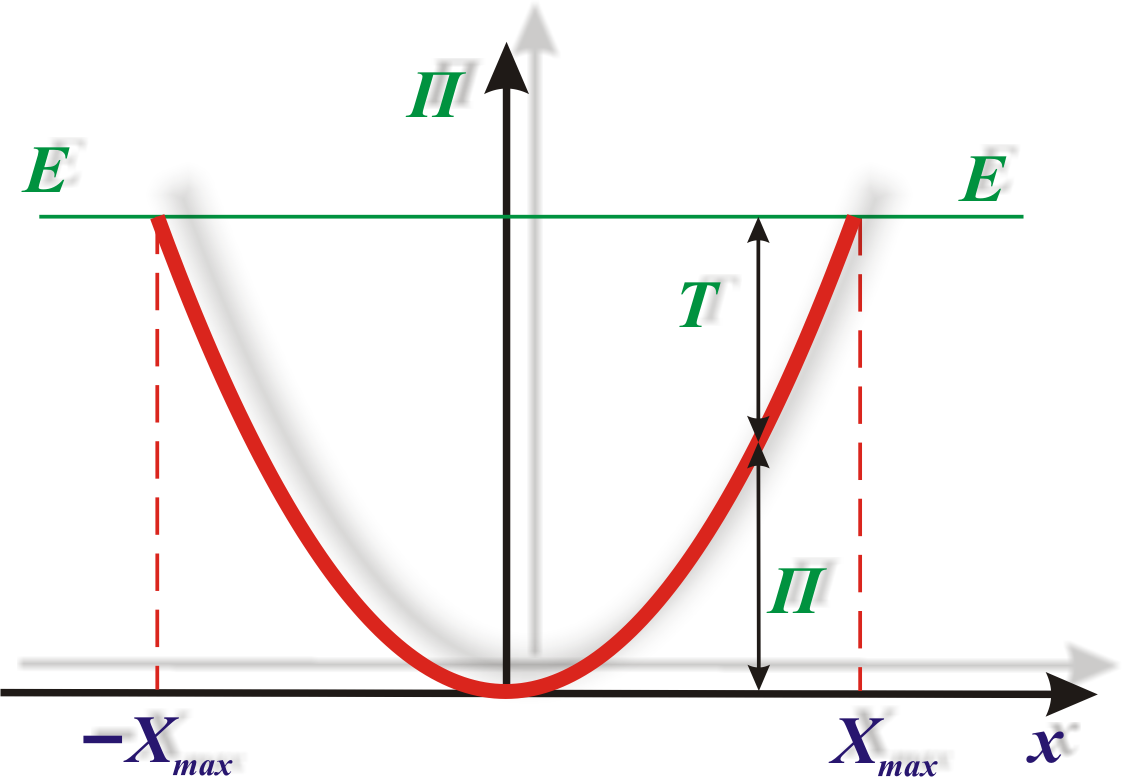
Рис. 3.3. Графическое представление потенциальной энергии
для упругодеформированного тела
В общем случае потенциальная кривая может иметь довольно сложный вид, например с несколькими чередующимися максимумами и минимумами (рис. 3.4). Проанализируем эту потенциальную кривую.
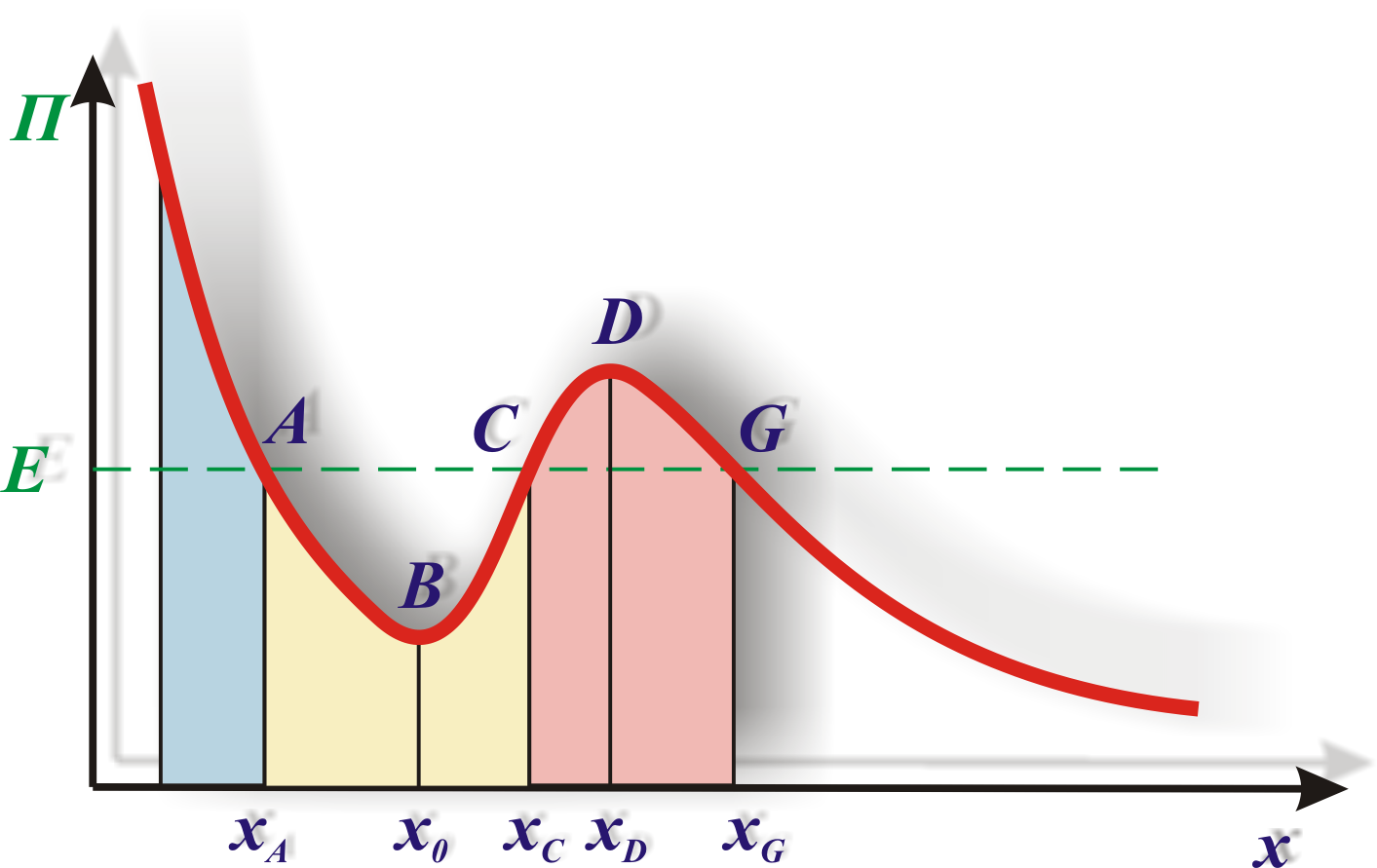
Рис. 3.4. Потенциальная кривая (общий случай)
Если Е – заданная полная энергия частицы, то частица может находиться только там, где П(х) Е, т.е. в незаштрихованных областях. Переходить из одной области в другую частица не может, т.к. ей препятствует потенциальный барьер CDG, с шириной равной интервалу значений х, при которых Е<П, а его высота определяется разностью Пmax – Е. Для того, чтобы частица смогла преодолеть потенциальный барьер, ей необходимо сообщить дополнительную энергию, равную высоте барьера или превышающую её. Таким образом, потенциальный барьер – это область через которую частица не может проникнуть имея данный запас полной энергии. В области АВС частица оказывается запертой в потенциальной яме и совершает колебания между точками хА и хС. Потенциальная яма – область, в которой частица может совершать колебания, но не может покинуть эту область.
В точке В с координатой х0 потенциальная энергия частицы минимальна. Условие минимума потенциальной энергии имеет вид:
![]() .
(3.22)
.
(3.22)
При смещении частицы из положения х0 влево или вправо она испытывает действие возвращающей силы, которая стремится вернуть частицу в положение равновесия, поэтому положение х0 является положением устойчивого равновесия. Условие (3.22) выполняется также для х равного хD, однако это равновесие будет неустойчивым: достаточно слегка вывести частицу из этого положения, как возникает сила, которая будет удалять её от положения хD.
Если частица при своем движении не может удалиться в бесконечность, движение называется финитным. Если же частица может уходить сколь угодно далеко, движение называют инфинитным. Частица в потенциальной яме совершает финитное движение.