

3 Кинетостатический анализ плоского механизма .
Определим ускорение т. А:
Т.
к. aA=anA,
то
![]()
Определим масштаб на плане ускорений:
![]()
Построим план ускорений:
Построение вектора уравнения точки В проводим на основании векторного уравнения
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определим угловые ускорения всех звеньев:
Из плана ускорений определим угловые ускорения звеньев
![]() ;
;
![]()
Выписываем значения параметров, необходимых для силового расчета.
Угловые скорости и ускорения звеньев:
ε1 = 0
ε2 = 87.6рад/с2
ε3 = 48,6рад/с2
Силы инерции:
Fi2 = m2*as2=15*15.1=226.5 Н
Fi3 = m3*as3=15*9.8=147 Н
Fi4 = m4*ac=7*5.7=40 H
Fi5 = m5*ab=7*15.3=107 H
Силы тяжести:
G1 =m1*g=4.6*10=46 H
G2 =m2*g=15*10=150 H
 G3
= m3*g=
15*10=150 Н
G3
= m3*g=
15*10=150 Н
G4 =m4*g=7*10= 70 Н
G5 =m5*g =7*10=70 Н
Определим моменты сил инерции ,действующие на все звенья механизма в данном положении
![]()
![]()
Определяем силы сопротивления для данного положения
Рассмотрим равновесие структурной группы 2-5 .
![]() H
H
![]() H
H
![]()
 Масштаб плана
сил :
Масштаб плана
сил :
![]()
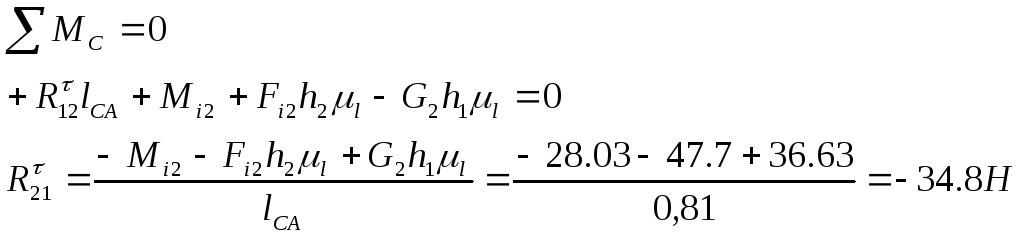
Рассмотрим равновесие структурной группы 3-4 .
Находим значение
тангенциальной составляющей реакции
![]()
![]()
По плану сил находим значения реакций RO4 и R31 и их нормальных составляющих.
![]()
Рассмотрим равновесие структурной группы 0-1 .
![]()
![]()
![]()
Из плана сил ,определяем реакцию опоры
![]()
-
Динамический синтез рычажного механизма
1. Построим график зависимости изменения приведённого момента сил полезного сопротивления от угла поворота входного звена во время рабочего хода.
![]()
![]()
где Fс -сила сопротивления.
Данные для расчётов возьмём из таблицы 1, а полученные результаты сведём в таблицу 2.
Выберем масштаб приведенного момента сил сопротивления для диаграммы.
![]()
Выберем масштаб угла поворота кривошипа.
![]()
2. Методом графического интегрирования строим график изменения работы сил сопротивления. Исходя из условия, что в начале и конце цикла работа движущих сил должна быть равна работе сил сопротивления, а также что
Мд - const, строим график изменения работы движущих сил. Определим масштаб графика работы.
![]()
3.
Построим график изменения разности
работ:
![]() =
Ад
– Ac
=
Ад
– Ac
4. Определим величину кинетической энергии звеньев рычажного механизма в каждом положении и построим график зависимости в масштабе:
,
![]()

Полученные данные сведём в таблицу 2.
Таблица 2
|
Тзвi, Дж |
53 |
37 |
0 |
55 |
54 |
50 |
53 |
54 |
0 |
58 |
53 |
60 |
|
Мс, Н*м |
15.34 |
29.8 |
39.13 |
38.2 |
23.8 |
0 |
23.8 |
38.2 |
39.13 |
29.74 |
15.65 |
0 |
5. Построим график изменения кинетической энергии маховика.
![]()
6 Определим максимальное изменение кинетической энергии маховика.
![]()
7.Определим момент инерции маховика.
![]()
8.Определяем размеры маховика и чертим его эскиз. Средний диаметр маховика будет равен:
![]()
9. Определим основные параметры маховика.
Наружный диаметр маховика D=1.2Dс=612мм
Внутренний диаметр маховика D2=0.8D=489мм
Внешний диаметр
ступицы
![]()
Внутренний диаметр
ступицы
![]()
Ширина обода
маховика
![]()
Ширина ступицы
![]()
Размер спицы на
ободе![]()
![]()
Размер спицы на
ступице![]()
![]()