

-
Разработка модели двигателя постоянного тока
2.1. Расчет модели электродвигателя постоянного тока
Технические данные электродвигателя приведены при температуре окружающей среды 20°С, поэтому необходимо пересчитать все сопротивления на рабочую температуру 80°С.
Для расчета параметров использованы известные формулы:
-
Сопротивление якоря
 (1)
(1)
 Ом
Ом
-
Номинальная частота вращения
 (2)
(2)
 рад/c
рад/c
-
Конструктивный коэффициент
 (3)
(3)
 В∙с/рад
В∙с/рад
-
Электромеханическая постоянная
Пусть приведенный момент инерции механизма Jм равен JД, тогда суммарный момент инерции:
 (4)
(4)
 кг·м2
кг·м2
-
Тогда электромеханическая постоянная:
 (5)
(5)
 c
c
-
Индуктивность якорной обмотки
 (6)
(6)
 Гн
Гн
-
Электромагнитная постоянная
 (7)
(7)
 c
c
-
Структурная схема двигателя постоянного тока
Структурная схема двигателя постоянного тока (ДПТ) представлена на рисунке 1.

Рисунок 1 – Структурная схема ДПТ
Рассмотрим подробно каждое звено схемы ДПТ:
-
Якорная цепь (апериодическое звено):
-
Постоянная времени Ta=0.03 c
-
Коэффициент усиления
 (8)
(8)

-
Интегральное звено:
-
Коэффициент усиления
 (9)
(9)

-
Пропорциональное звено:
-
Коэффициент усиления
 (10)
(10)

-
Моделирование прямого пуска двигателя
Модель ДПТ с указанием параметров приведена на рисунке 2.
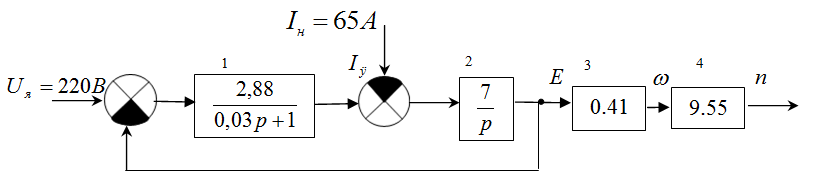
Рисунок 2 – Модель ДПТ с указанием параметров
Звено 4 в данной модели введено для перевода угловой частоты вращения в обороты.
Модель двигателя постоянного тока в программе «Анализ систем 3.1» представлена на рисунке 3.
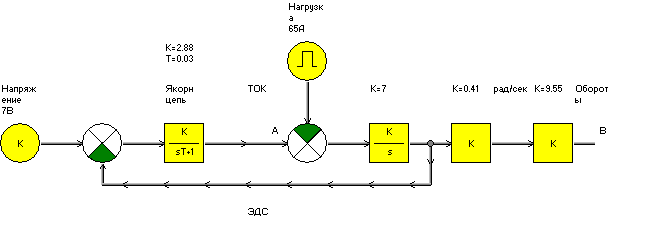
Рисунок 3 – Модель ДПТ в программе «Анализ систем 3.1»
Моделируются два последовательных режима: прямой пуск двигателя от сети постоянного тока напряжением 220В на холостом ходу, а затем ступенчатое приложение номинальной нагрузки. Длительность каждого режима 0,5 секунды. Шаг интегрирования 0,001 с.
На рисунке 4 представлена графическая форма вывода результатов.

Рисунок 4 – Моделирование переходных процессов в ДПТ
По результатам видно, что скорость холостого хода – 860 об/мин, максимальная скорость двигателя – 920 об/мин, а переходные процессы имеют колебательный характер (перерегулирование составляет 7%). По графику видно, что при прямом пуске (даже на холостом ходу), ток якоря на короткое время (около 0,05 с.) достигает 400 А, что почти в 6 раз превышает номинальное значение (65 А). Но допустимо, чтобы при пуске ток якоря был больше номинального значения тока в 2.5 раза (Imax =2.5·Iн=2.5·65 = 162.5 А).
После приложения номинальной нагрузки скорость двигателя устанавливается на номинальную величину (770 об/мин) – это свидетельствует о том, что двигатель смоделирован правильно.