

3 Скремблирование
Двоичный сигнал на входе модема может иметь произвольную статистическую структуру, которая не всегда удовлетворяет требованиям, предъявляемым синхронным способом передачи. Среди этих требований основными являются следующие:
- частота смены символов «1, 0» должна обеспечивать надежное выделение тактовой частоты непосредственно из принимаемого сигнала;
- спектральная плотность мощности передаваемого сигнала должна быть, по возможности, постоянной и сосредоточенной в заданной области частот с целью снижения взаимного влияния каналов.
Приведенные требования должны выполняться независимо от структуры передаваемого сообщения. Поэтому в синхронных модемах исходная последовательность двоичных посылок часто подвергается определенной обработке. Смысл такой обработки состоит в получении последовательности, в которой статистика появления нулей и единиц приближается к случайной, что позволяет удовлетворить двум названным выше требованиям.
Одним из способов такой обработки является скремблирование (scramble — перемешивание). Скремблирование — это обратимое преобразование структуры цифрового потока без изменения скорости передачи с целью получения свойств случайной последовательности. Скремблирование производится на передающей стороне с помощью скремблера, реализующего логическую операцию суммирования по модулю два исходного и псевдослучайного двоичных сигналов. На приемной стороне полного бреда осуществляется обратное преобразование — дескремблирование, выполняемое дескремблером. Дескремблер выделяет из принятой последовательности исходную информационную последовательность. На рисунке 6 показано включение скремблера и дескремблера в канал связи.
Основной частью скремблера является генератор псевдослучайной последовательности (ПСП) в виде линейного и-каскадного регистра с обратными связями, формирующий последовательность максимальной длины 2—1. Различают два основных типа скремблеров-дескремблеров — самосинхронизирующиеся и с начальной установкой (аддитивные).
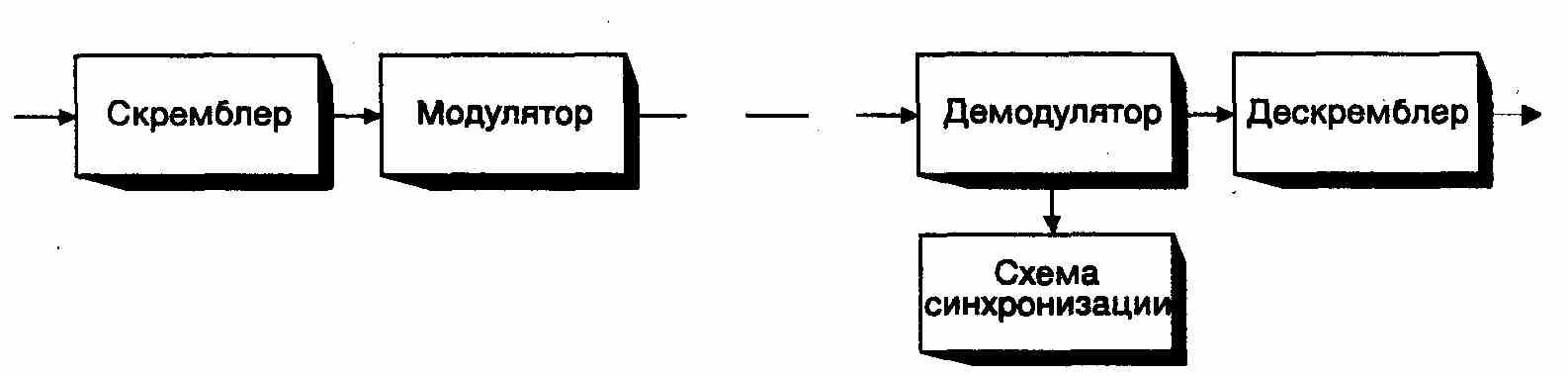
Рисунок 6 - Схема включения скремблера и дескремблера в канал связи
Схема пары самосинхронизирующихся скремблер-дескремблер представлена на рисунке 7. Особенностью самосинхронизирующего скремблера является то, что он управляется самой скремблированной последовательностью, т. е. той, которая поступает в канал. Поэтому в данном случае не требуется специальной установки состояний скремблера и дескремблера, поскольку они оказываются идентичными в результате записи в их регистры сдвига скремблированной последовательности.
При потере синхронизма между скремблером и дескремблером время его восстановления не превышает числа тактов, равного числу ячеек регистра скремблера. На приемной стороне выделение информационной последовательности происходит сложением по модулю два принятой скремблированной последовательности с псевдослучайной последовательностью (ПСП) регистра.
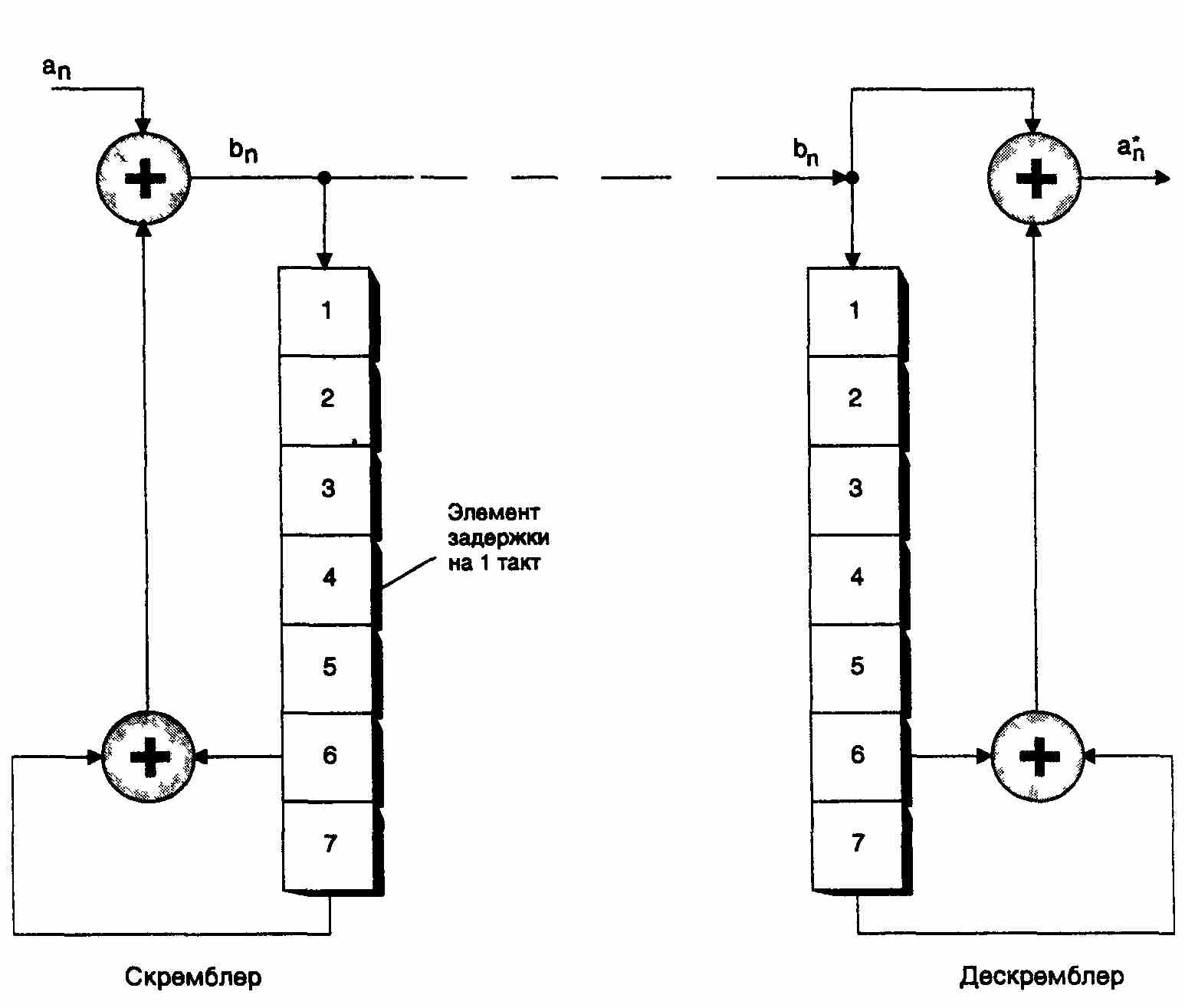
Рисунок 7 - Схема скремблирования с самосинхронизацией
Одним из недостатков самосинхронизирующих скремблеров-дескремблеров является присущее им свойство размножения ошибок. Второй недостаток самосинхронизирующихся скремблеров связан с возможностью появления на его входе так называемых "критических ситуаций", когда выходная последовательность приобретает периодический характер с периодом, меньшим длины ПСП. Для предотвращения таких ситуаций в скремблере и дескремблере согласно рекомендациям ITU-T предусматриваются специальные дополнительные схемы контроля, которые выявляют периодичность элементов на входе и нарушают ее.
Недостатки, присущие самосинхронизирующим скремблеру-дескремблеру, практически отсутствуют при аддитивном скремблировании (рисунок 8).
Однако в этом случае требуется предварительная идентичная установка состояний регистров скремблера и дескремблера. В скремблере с начальной установкой, как и в самосинхронизирующем скремблере, производится суммирование входного сигнала и ПСП, но результирующий сигнал не поступает на вход регистра. В дескремблере скремблированная последовательность также не проходит через регистр сдвига, поэтому размножения ошибок не происходит. Суммируемые в скремблере последовательности независимы, поэтому критических ситуаций не наступает. Отсутствие эффекта размножения ошибок и необходимость специальной защиты от нежелательных ситуаций делают способ аддитивного скремблирования предпочтительнее и экономически эффективнее, если не учитывать затрат на решение задачи взаимной синхронизации пары скремблер-дескремблер.
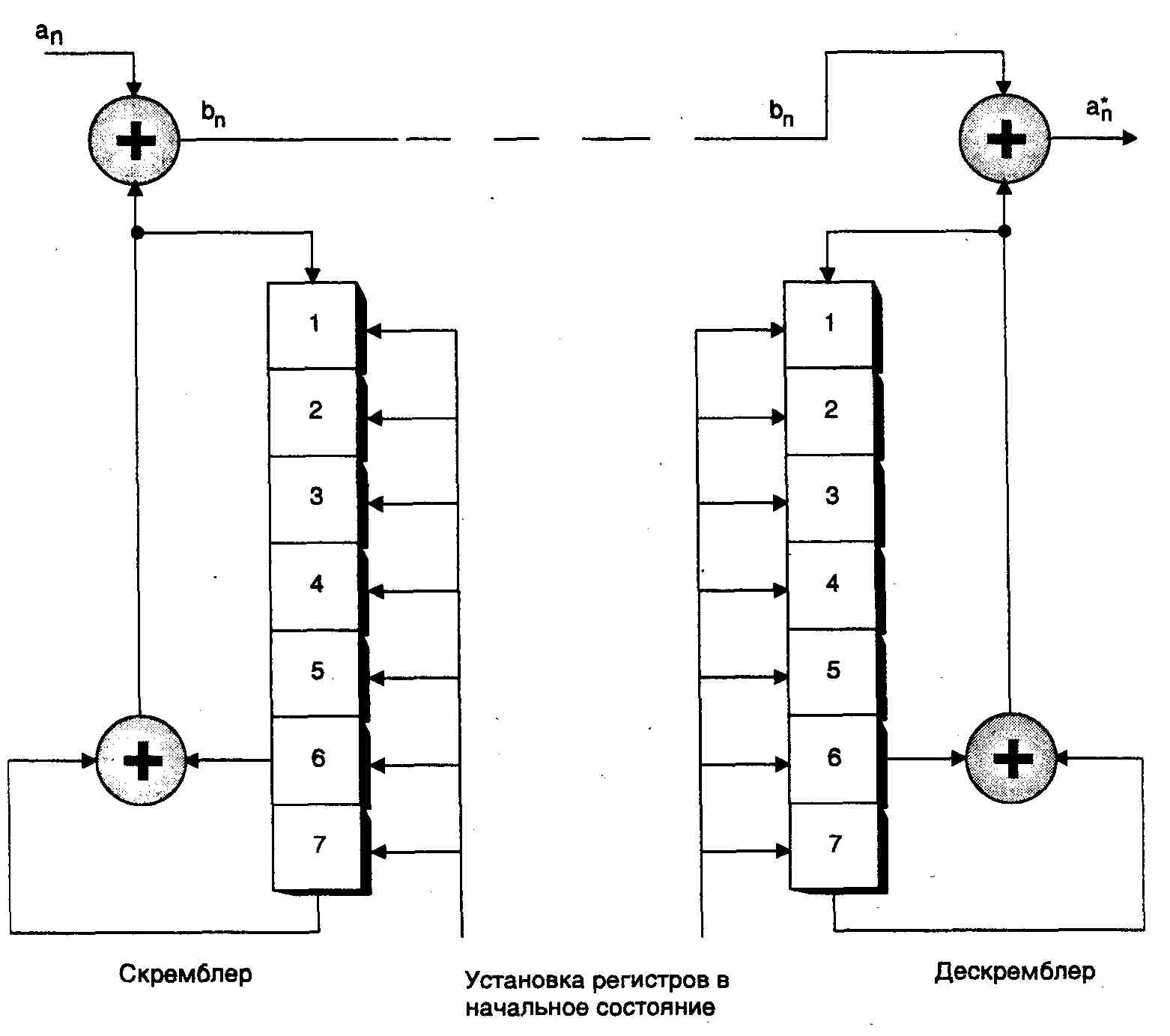
Рисунок 8 - Схема скремблирования с начальной установкой
Рассмотрим влияние скремблирования на энергетический спектр двоичного сигнала. На рисунке 9, а изображен пример энергетического спектра для периодического сигнала с периодом Т, содержащим 6 двоичных элементов с длительностью То. После скремблирования ПСП спектр существенно "обогащается" (рисунок 9, б). В примере число составляющих спектра увеличилось в «М» раз, одновременно уровень каждой составляющей уменьшается в такое же в «М» число раз.
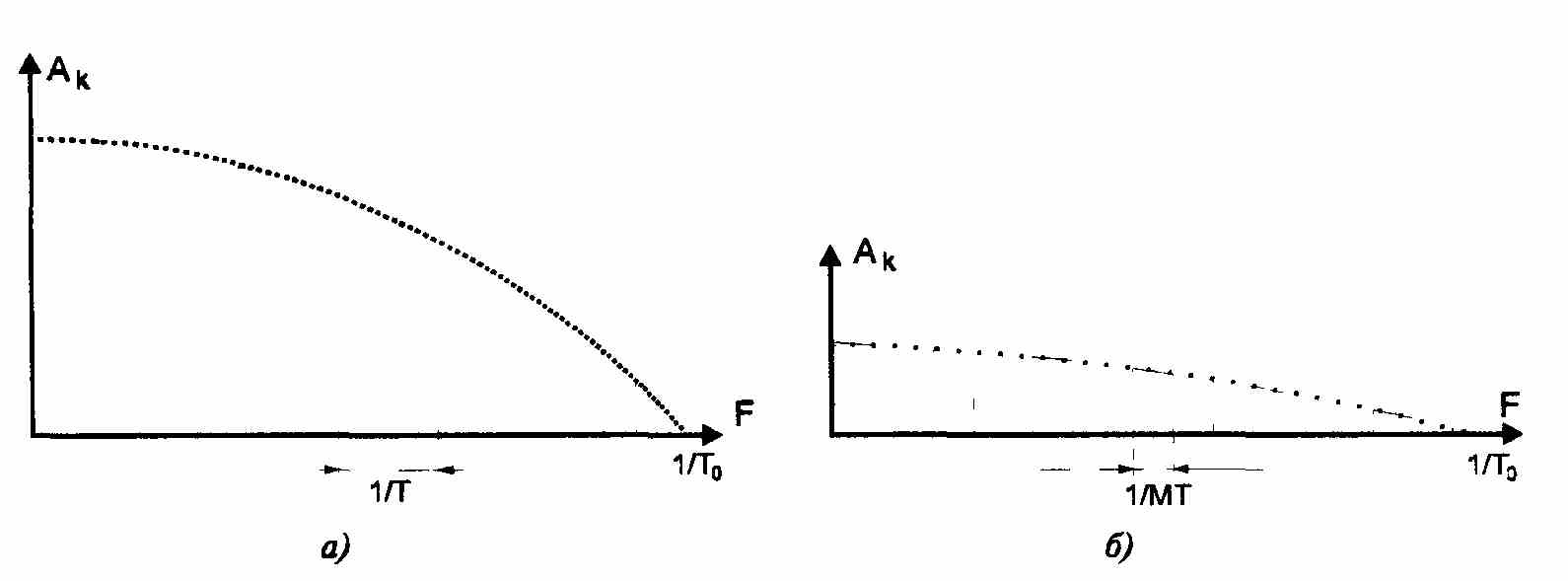
Рисунок 9 - Спектр сигнала до (а) и после (б) скремблирования
4 Эхо-подавление
Организация дуплексной высокоскоростной передачи является не простой задачей при использовании коммутируемых каналов с двухпроводным окончанием. В отличие от выделенных четырехпроводных каналов (рисунок 10, а), характерной особенностью телефонного канала КТСОП является наличие участков перехода двухпроводной части канала в четырехпроводную. Переход осуществляется при помощи дифференциальных систем, обеспечивающих необходимое затухание по встречным направлениям передачи. Если эти затухания очень велики, то схему связи можно практически считать четырехпроводной, представляещей собой электрически разомкнутую систему. Однако идеальных дифференциальных систем не существует. В результате, как и во всякой электрически замкнутой системе, в двухпроводном телефонном канале присутствуют токи обратной связи, вызывающие искажения амплитудно-частотных и фазочастотных характеристик прямого и обратного каналов. В качестве примера на рисунке 10 б приведена типичная схема модемного канала с тремя дифференциальными системами и, соответственно, тремя путями прохождения эхо-сигналов.
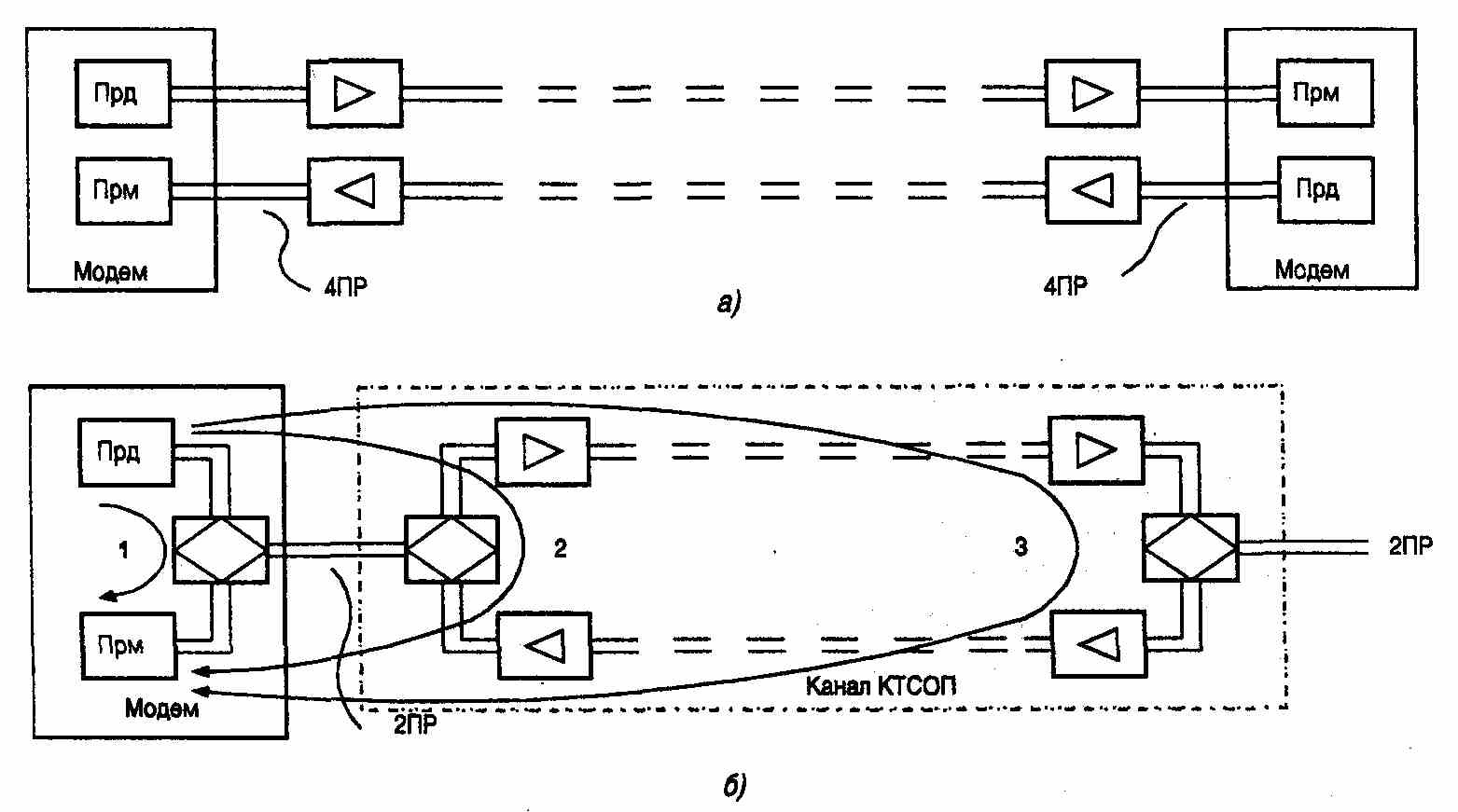
Рисунок 10. - Схема телефонных каналов с четырехпроводным (а) и двухпроводным окончанием (б) с путями прохождения эхо-сигналов (1, 2, 3)
Собственный отраженный и задержанный сигнал поступает на вход демодулятора, являясь для него помехой. Чем большей задержкой обладает эхо-сигнал, тем труднее с ним бороться.
Рассмотрим один из возможных вариантов дифференциальных систем — мостовую трансформаторную дифференциальную систему (рисунок 11). Такая дифференциальная система будет обеспечивать достаточное затухание (более 50 дБ) во встречных направлениях приема-передачи лишь при условии выполнения ее баланса. Однако обеспечить точный баланс не так просто, как может показаться на первый взгляд. Причиной этому является как изменения комплексных сопротивлений двух- и четырехпроводных линий, так и их несоответствие номинальным значениям. Это происходит вследствие, например, неодинаковой длины и различного качества абонентских линий, или в случае параллельного подключения модема к телефонному аппарату.
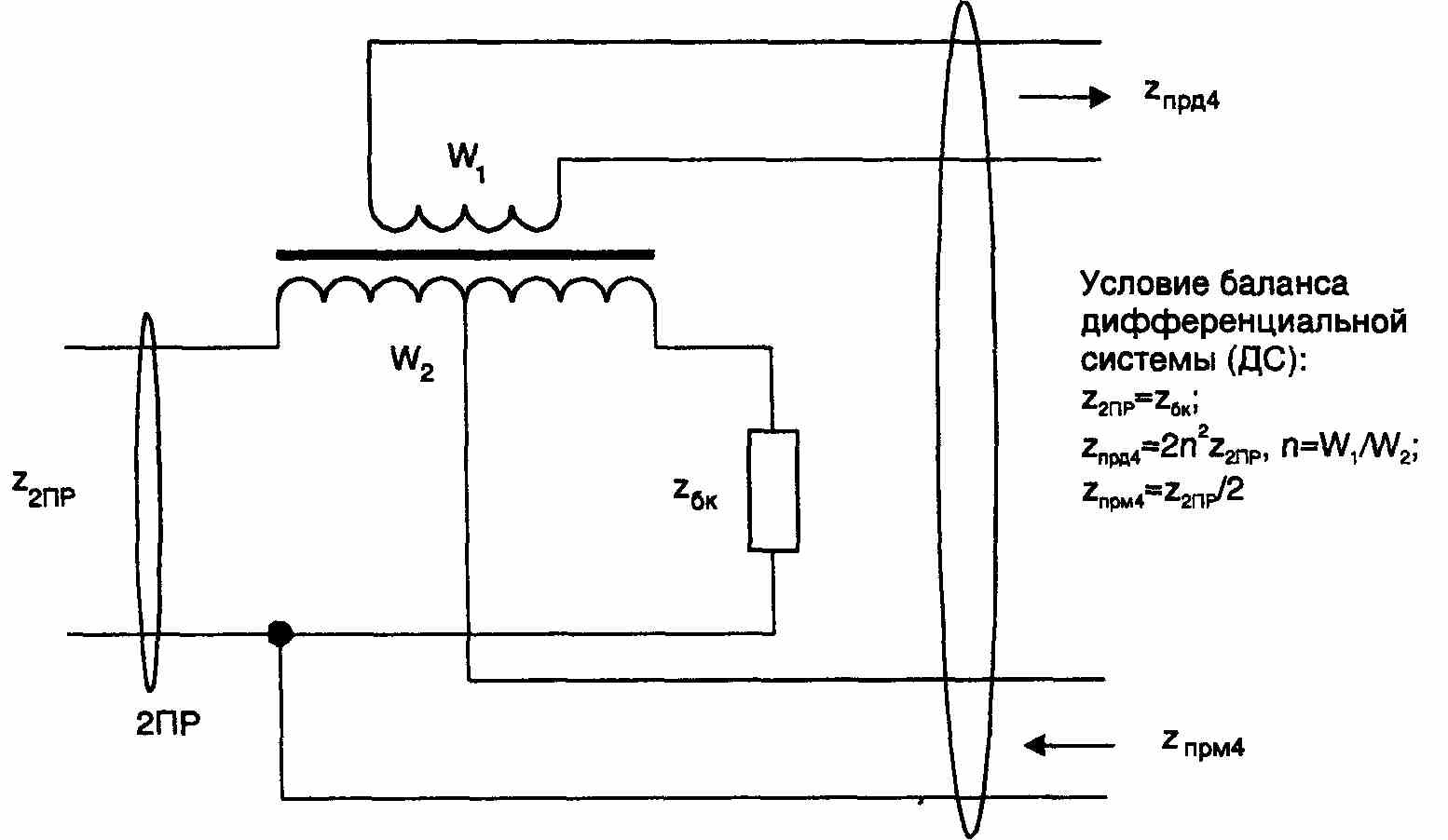
Рисунок 11. - Схема мостовой трансформаторной дифференциальной системы
Известны так называемые самобалансирующиеся дифференциальные системы, автоматически подстраиваемые под параметры используемой линии связи. Их рассмотрение выходит за рамки данной книги. Стоит лишь отметить, что они представляют собой достаточно сложные электронные устройства.
Для борьбы с электрическим эхом возможно использование следующих методов:
- частотное разделение каналов;
- применение самобалансирующихся дифференциальных систем;
- компенсация эхо-сигнала.
При использовании первого метода вся полоса пропускания канала разделяется на два частотных подканала, по каждому из которых передается сигнал в одном направлении. Очевидно, в этом случае нет возможности использовать полосу канала в полном объеме. Более того, для исключения проникновения боковых гармоник между подканалами приходится вводить защитный частотный интервал. В результате этого подканалы займут меньше половины полной полосы пропускания канала. Существующие протоколы модуляции с частотным разделением каналов, например V. 21 и V. 22, обеспечивают симметричную дуплексную связь со скоростью не выше 2400 бит/с. Ряд протоколов с частотным разделением, например HST, обеспечивает и более скоростную связь, но в одном направлении. В то время как скорость передачи по обратному каналу значительно меньше. Такая разновидность дуплексной связи называется асимметричной.
Применение автоматически настраиваемых дифференциальных систем экономически невыгодно из-за высокой сложности их технической реализации.
В связи с этим наибольшее распространение получил компенсационный метод борьбы с эхо-сигналом. Суть метода заключается в том, что модем, обладая информацией о своем собственном передаваемом сигнале Sпрд, может использовать ее для фильтрации принимаемого сигнала Sпрм от эхо-помехи. Отраженный эхо-сигнал E (t) претерпевает существенные изменения вследствие амплитудных и фазовых искажений. На этапе установления соединения каждый модем посылает определенный зондирующий сигнал и определяет параметры эхо-отражения: время запаздывания,
амплитудные и фазовые искажения, мощность отраженного сигнала. В процессе сеанса связи эхо-компенсатор модема вычитает из принимаемого входного сигнала свой собственный выходной E* (t), скорректированный в соответствии с полученными параметрами эхо-отражения. Функцию создания копии эхо-сигнала выполняет линия задержки с отводами, схема которой приведена на рисунок 12.
Технология эхо-компенсации позволяет отвести для дуплексной передачи всю ширину полосы пропускания телефонного канала, однако требует немалых вычислительных ресурсов для обработки сигнала.
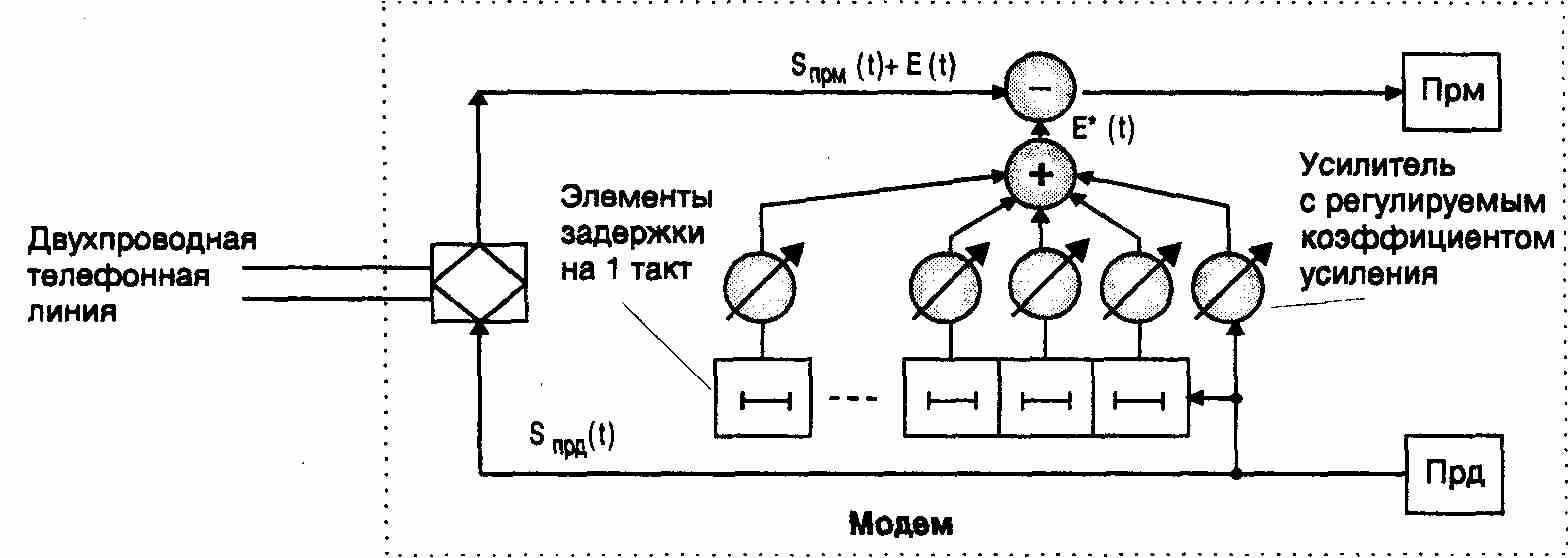
Рисунок 12. - Схема эхо-компенсатора