

2. Сила электрического взаимодействия.

т.е. сила, с которой второе тело действует на первое должна быть равна по величине и противоположна по направлению силе, с которой первое тело действует на второе. Это утверждение носит название третьего закона Ньютона.
Соотношение (2.3) можно записать в виде
![]()
где г — расстояние между зарядами, е0 = 10 9/36я Кл2/(Нм2) — электрическая постоянная.
![]()
Для системы из N взаимодействующих частиц Третий закон Ньютона выглядит следующим образом:

т.е. сумма всех внутренних сил в системе равна нулю.
4. Силы
Все силы в природе делятся на фундаментальные и нефундаментальные.
Последние, в конечном итоге, можно всегда свести к действию фундаментальных сил. К фундаментальным силам относятся: силы гравитационного взаимодействия, силы
электрического взаимодействия, ядерные силы, т.е. силы, с которыми взаимодействуют нуклоны (протоны и нейтроны), входящие в состав атомного ядра (сильное взаимодействие), и силы, возникающие при радиоактивном р-распаде (так называемое слабое взаимодействие). Последние два вида фундаментальных сил нами рассматриваться не будут. К нефундаментальным силам относятся: силы упругости (сила реакции опоры и сила натяжения нити), сила Архимеда, силы трения и др.
1. Сила гравитационного взаимодействия.
![]()

Любые материальные точки притягивают друг друга с силой
3. Силы упругости.
Эти силы возникают в твердом теле при его деформировании (изменении его формы). Простейшим видом деформации тела является его растяжение или сжатие. Например, оно возникает в тонком стержне, один конец которого
закреплен, а к другому приложена сила f перпендикулярно основанию стержня. Упругое
![]()
величиной силы f, отнесенной к площади поперечного сечения стержня S. Это напряжение одинаково вдоль всей длины стержня. Если приложенная сила i не очень велика и можно пренебречь изменением толщины стержня, то справедлив закон Гука:
![]()
где 6L — удлинение стержня, Lo — длина стержня до деформации. Коэффициент Е,
характеризующий упругие свойства материала стержня, называется модулем Юнга.
![]()
Применительно к пружине закон Гука записывается в виде:
![]()
где
и х = 5L — абсолютное удлинение
пружины. Силами упругости являются и так называемые силы натяжения нити Т и реакции опоры N .
5. Закон сохранения импульса
Импульсом материальной точки называется векторная величина, равная произведению ее массы m на вектор скорости частицы v :
![]()
Из первого закона Ньютона следует, что импульс свободной частицы не изменяется ни по величине, ни по направлению, т.е. р = const. Если
10
Переписав (2.11) в виде


![]()




![]()
![]()
систему взаимодействуют только между собой и не взаимодействуют с телами, не входящими в систему, то такая система называется замкнутой. В противном случае система не является замкнутой.
Импульсом системы Р называется векторная сумма импульсов всех частиц, входящих в систему:
![]()
где т, — масса i-ой частицы и Vj - ее скорость в
выбранной ИСО. С течением времени импульсы частиц изменяются, а сами частицы движутся по каким-то своим траекториям Fj = Г|(1).

![]()
Центром масс (центром инерции) системы частиц называется точка в пространстве, радиус- вектор которой определяется из выражения:
![]()
Найдем теперь скорость, с которой движется центр масс системы. По определению вектора скорости
внешних сил, действующих на систему. Соотношение (2.14) называется вторым законом Ньютона для системы материальных точек:
скорость изменения импульса системы равна векторной сумме внешних сил, действующих на систему.
Используя (2.12), уравнение (2.14) можно, переписать в виде
масс системы и а4 - ускорение i-ой частицы. Из
(2.15) видно, что второй закон Ньютона для системы частиц по форме совпадает со вторым законом Ньютона для материальной точки, только вместо массы частицы стоит масса системы, вместо ускорения частицы — ускорение центра масс, а в правой части — не все, а только внешние по отношению к системе силы. Уравнение (2.14) можно записать в виде
![]()
где dP — бесконечно малое изменение импульса системы за время dt под действием импульсов
внешних сил Fkdt, то есть импульс системы могут изменить только импульсы внешних сил.
11
Если система замкнутая, то
и dP
= 0 , то есть импульс
замкнутой системы:
![]()
![]()
![]()
![]()
![]()

![]()



Из соотношения (2.15) следует, что центр масс замкнутой системы движется равномерно и
6. Закон сохранения момента импульса
Помимо импульса р = mv , материальная точка характеризуется еще одной динамической переменной, которая называется моментом
импульса. Моментом импульса частицы I относительно начала координат называется векторная величина
![]()
где квадратные скобки обозначают векторное произведение. По модулю
![]()


![]()


![]()
![]()
![]()
Из (2.21) видно, что для замкнутой системы
![]()
Это утверждение называется законом сохранения момента импульса. Как и закон
сохранения импульса, этот закон вытекает из свойства нашего пространства, которое называется изотропностью пространства: явления, протекающие в замкнутой системе, не изменяются при повороте всей системы в пространстве.
13
Лекция 3. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Поступательное и вращательное движение твердого тела; момент инерции тела; уравнение динамики вращательного движения; теорема Штепнера; плоское движение; закон сохранения момента импульса.

где
г4
— радиус-вектор i-й
точки (начало ИСО
![]()

Перейдем теперь к изучению движения протяженного абсолютно твердого тела, которое можно рассматривать как совокупность жестко связанных материальных точек. Такое тело произвольной формы обладает, как мы знаем, шестью степенями свободы.

![]()
где М — масса тела и v — скорость любой точки тела. Второй закон Ньютона при поступательном движении тела записывается в виде:
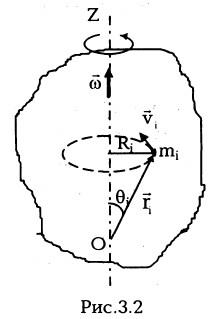
выбрано на оси вращения OZ) и со — угловая скорость точки, которая одинакова для всех точек тела. Скорость v{ направлена по касательной к окружности, а по абсолютной величине
Vj = corj sinBj = coRj, (3.4)
где Rj — радиус окружности, по которой движется точка.
![]()
или с учетом (3.4)
![]()
![]()
Отметим сразу же, что проекция момента импульса i-й частицы на ось вращения OZ (момент импульса относительно оси OZ)
![]()
где а — ускорение тела (любой его точки) и Fk —
внешняя сила, действующая на тело.
Другим простейшим видом движения твердого тела является вращение тела вокруг фиксированной в пространстве оси. При таком движении все точки тела описывают окружности, лежащие в плоскостях, перпендикулярных оси вращения OZ (рис.3.2), причем линейная скорость i-й точки
2. Момент инерции твердого тела
Для получения уравнения движения для тела, вращающегося вокруг закрепленной оси, следует воспользоваться уравнением моментов (2.21) из предыдущей лекции, взяв лишь проекцию этого уравнения на ось вращения OZ:
![]()
14
![]()
![]()
нас, то момент силы Fkl будет отрицательным.
Подставляя (3.7) в (3.6), получим уравнение движения тела вокруг закрепленной оси:
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
относительно оси OZ. Справа в выражении (3.6) стоит сумма проекций на ось OZ моментов внешних сил (или сумма моментов внешних сил относительно оси OZ). По определению
