

4.3 Контрольний тест до інформаційного модуля 4
1. Скільки додаткових площин проекцій необхідно ввести для визначення довжини відрізка прямої загального положення?
а) одну;
б) дві;
в) три.
2. Оберіть правильний варіант розв’язування задачі на переведення прямої АВ із загального в проекціювальне положення:
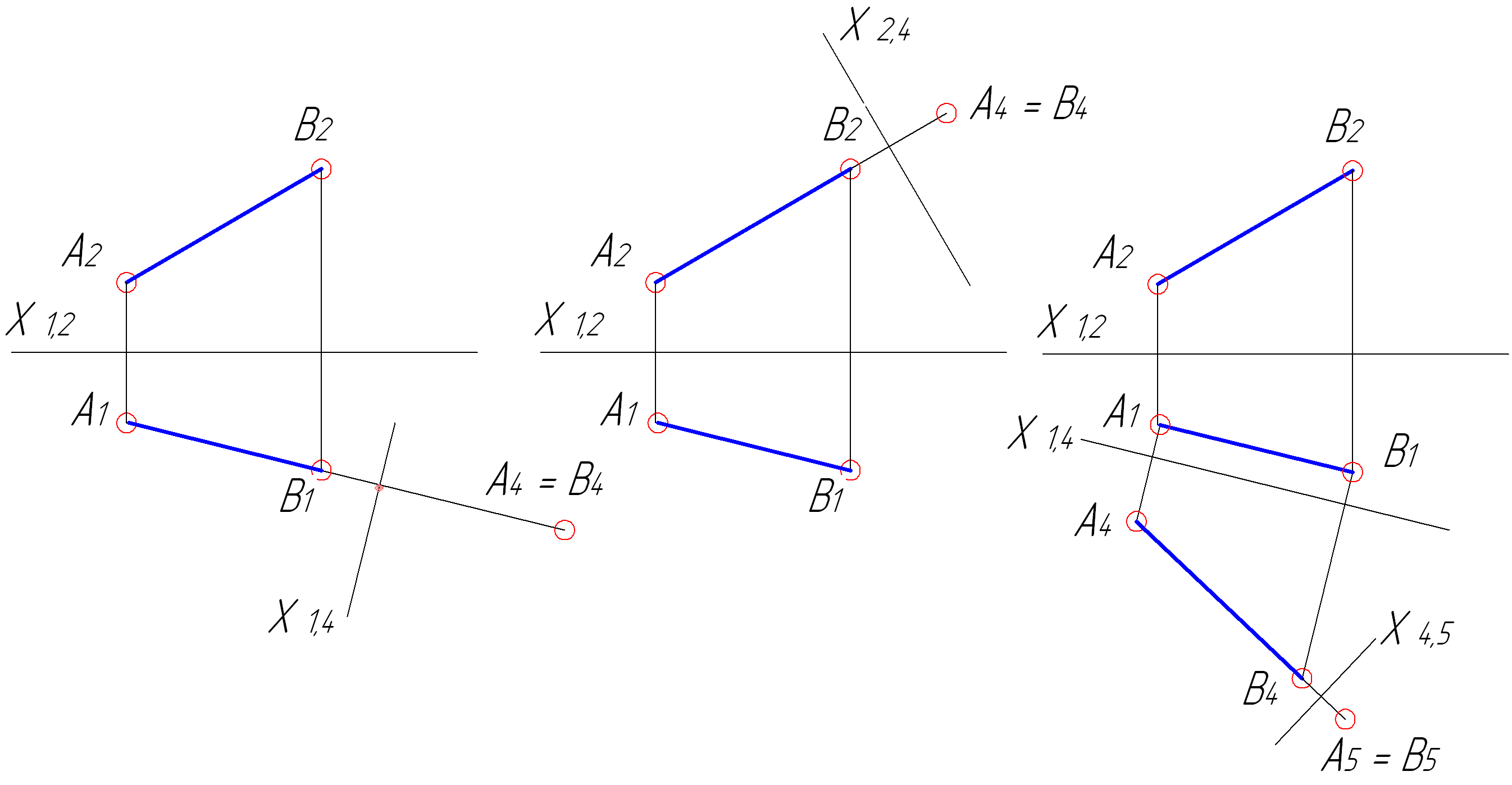
а) б) в)
3. Скільки додаткових площин проекцій необхідно для приведення плоскої фігури загального положення в проекціювальне?
а) одну; б) дві; в) три.
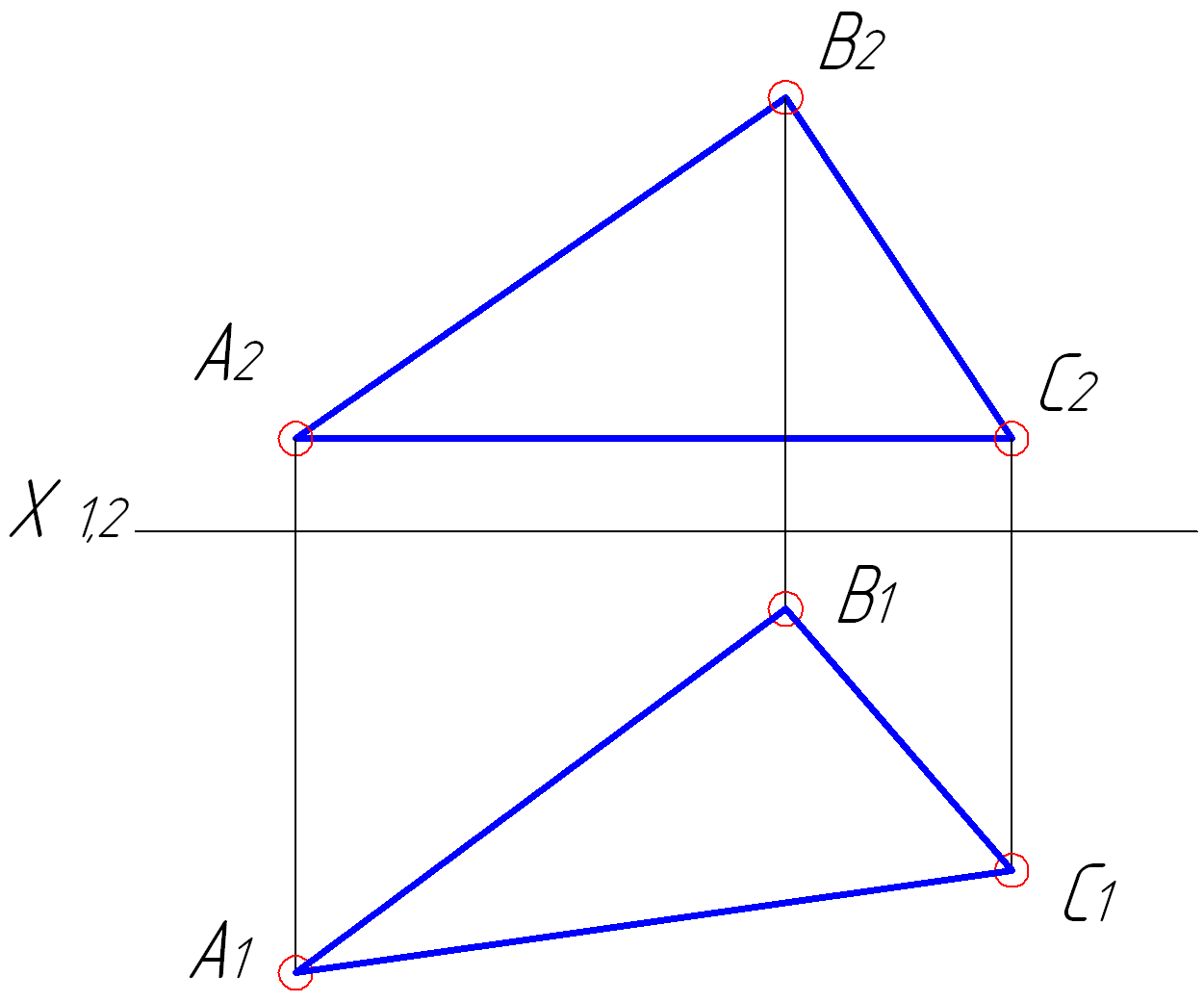
4. Оберіть правильний варіант введення додаткової площини для переведення площини, заданої ΔАВС в проекцію вальне положення.
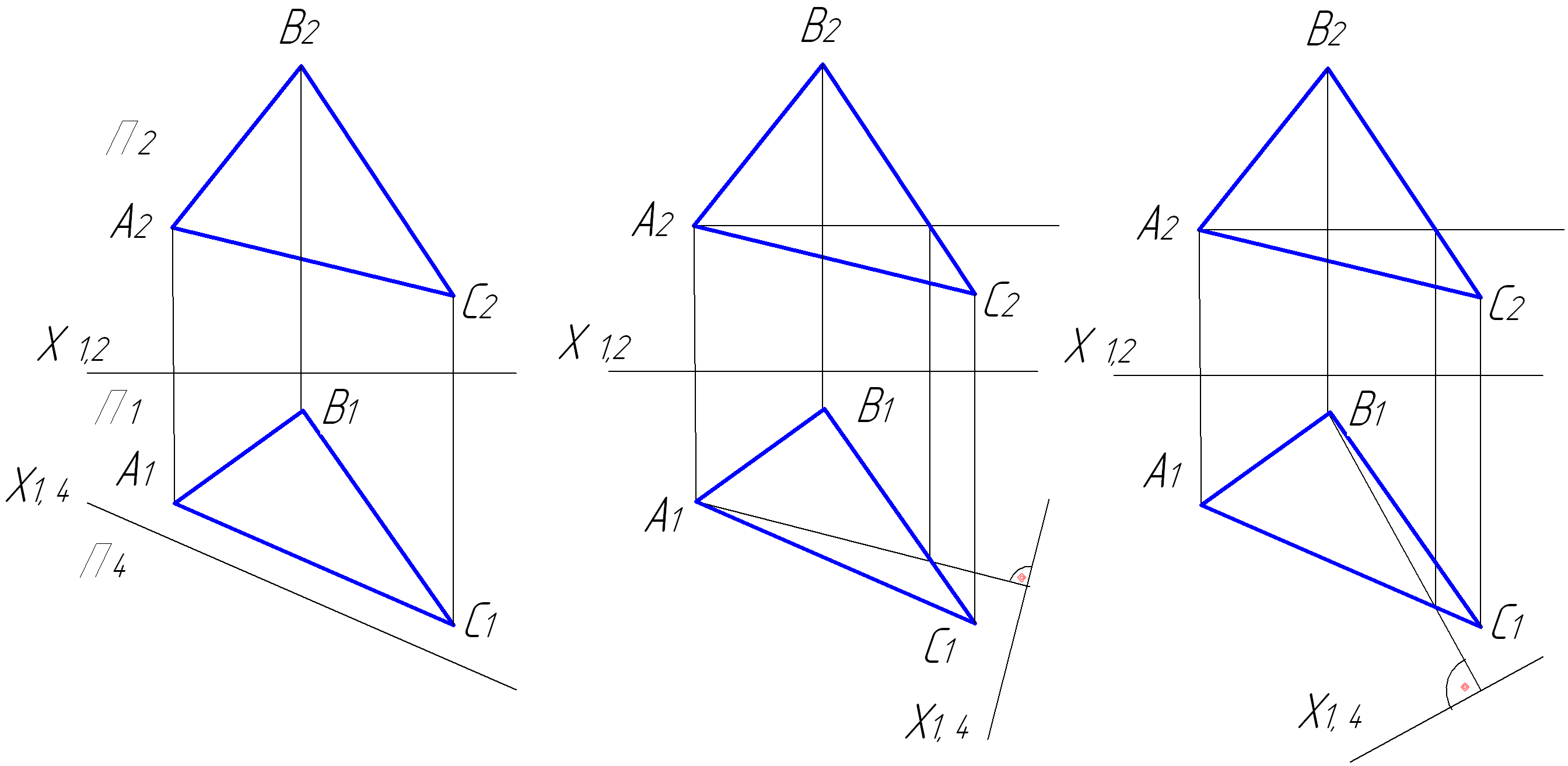
а) б) в)
5. Оберіть правильний варіант визначення відстані між точкою та прямою
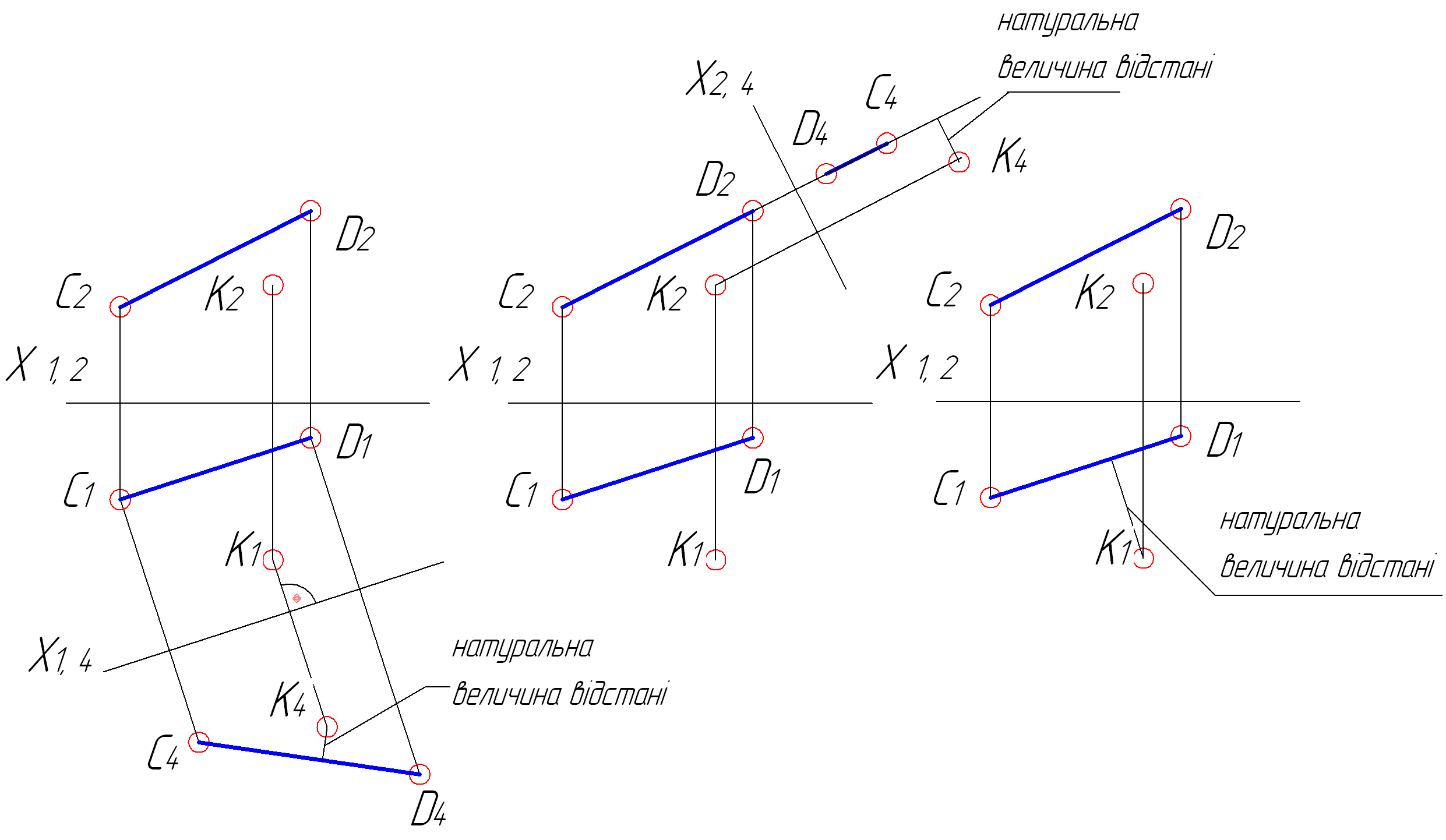
а) б) в)
-
С
 кільки
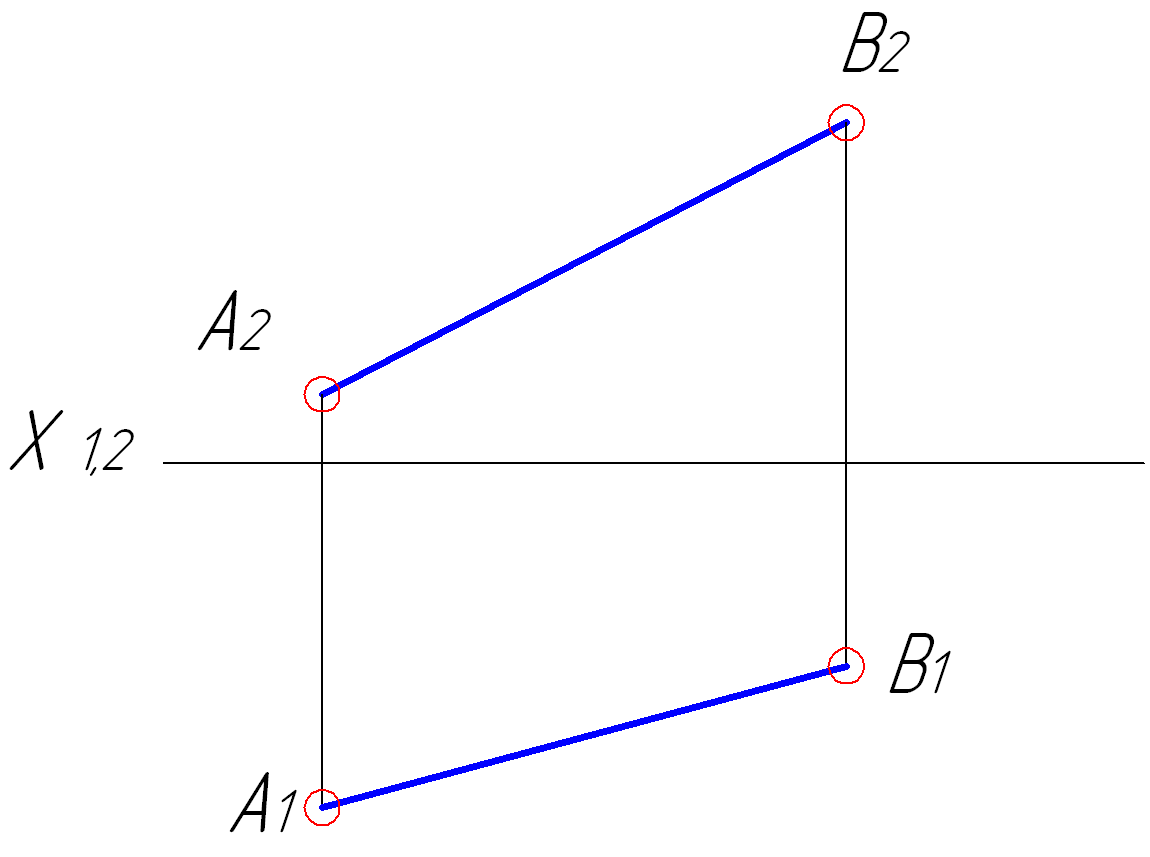
переміщень треба зробити для перетворення
прямої АВ в пряму рівня?
кільки
переміщень треба зробити для перетворення
прямої АВ в пряму рівня?
а) одне;
б) два;
в) три.
-
Скільки переміщень треба зробити для перетворення площини α(АВС) в площину рівня?
а) одне;
б) два;
в) три.
-
Для визначення відстані між точкою С та площиною β(a║b) необхідно таке перше перетворення:
а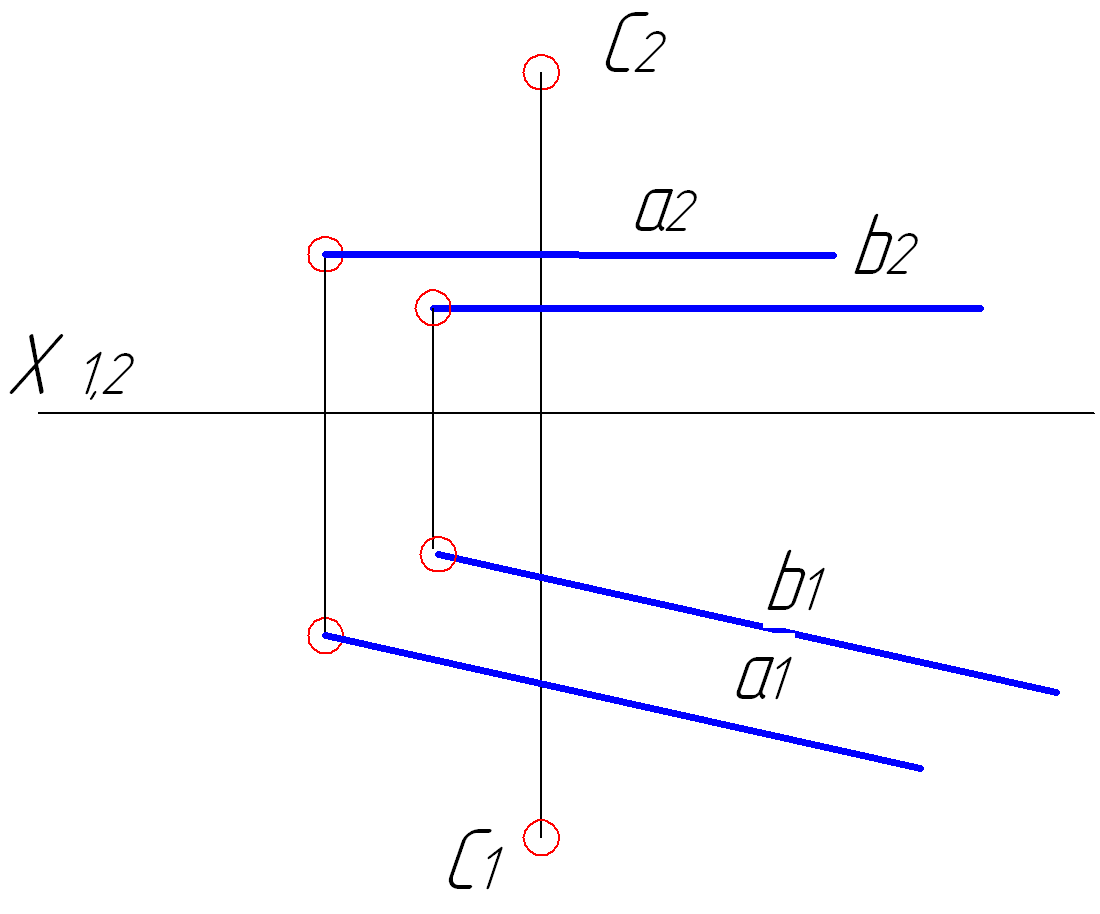 )
a2║b2
перемістити
)
a2║b2
перемістити
перпендикулярно X 1,2;
б) a1║b1 перемістити
перпендикулярно X 1,2;
в) a2║b2 перемістити
паралельно X 1,2 .
Інформаційний модуль 5 криві поверхні
5.1 Загальна характеристика формоутворення кривих ліній та кривих поверхонь
Крива лінія – це геометричне місце послідовних положень точки, що здійснює неперервний рух в просторі. При утворенні кривої лінії у такий спосіб її можна подати у вигляді множини точок, які їй належать, і відобразити на комплексному кресленні як сукупність відповідних проекцій окремих точок множини, що показано на рис.5.1.


Рисунок 5.1 - Комплексне креслення кривої лінії
 Криву
поверхню
можна розглядати як траєкторію
переміщення деякої лінії ( твірної), що
здійснює неперервний рух в просторі.
Деякі поверхні утворюються внаслідок
руху лінії постійної форми, інші так,
що твірна разом зі зміною положення в
просторі змінює також і свою форму.
Поверхню, показану на рис. 5.2, у такому
випадку розглядають як однопараметричну
множину твірних {ℓ}.
Криву
поверхню
можна розглядати як траєкторію
переміщення деякої лінії ( твірної), що
здійснює неперервний рух в просторі.
Деякі поверхні утворюються внаслідок
руху лінії постійної форми, інші так,
що твірна разом зі зміною положення в
просторі змінює також і свою форму.
Поверхню, показану на рис. 5.2, у такому
випадку розглядають як однопараметричну
множину твірних {ℓ}.
Закон переміщення твірної зручно задавати деякими сталими лініями, що мають назву напрямних ліній.
Рисунок 5.2 – Каркас кривої поверхні
Кожна точка твірної при її русі описує деяку лінію m, сукупність яких складає також однопараметричну множину {m} (див. рис. 5.2 ).
З кривих ℓi та mi складається так званий сітчастий каркас кінематичної
поверхні. Якщо врахувати неперервне переміщення твірної, а відповідно, неперервність і самої поверхні, то можна зробити висновок: через будь-яку точку М поверхні можна провести пару кривих ℓм і mм.
Сукупність умов, необхідних і достатніх для задання поверхні, називається визначником поверхні. Останній складається з геометричної та алгоритмічної частин. Геометричною частиною визначника поверхні є геометричні фігури, які беруть участь в утворенні поверхні. Алгоритмічна частина – це сукупність правил застосування геометричної частини визначника для утворення поверхні.
Велика кількість різноманітних поверхонь, які використовують в інженерній практиці, потребує їх систематизації. Це особливо важливо в автоматизованому проектуванні при створенні інформаційних систем. В кінематичному способі утворення поверхонь цілком природно в основу систематизації покласти форму твірної лінії і закон її переміщення. Тому за формою твірної розрізняють лінійчаті (твірна – пряма), криволінійні (твірна – крива), за законом переміщення твірної – поверхні обертання, поверхні переносу і гвинтові.