

1. Кинематический и силовой расчеты привода. Выбор электродвигателя
1.1. Техническое задание на проектирование привода
Проектирование
привода выполняют на основании
технического задания, в котором содержатся
назначение, основные технические
характеристики, режим нагружения и
ресурс механизма. В качестве силовой
характеристики привода в задании
приведена номинальная (наибольшая
длительно действующая) нагрузка на валу
исполнительного механизма, которая
задана в виде вращающего момента
![]() или окружного усилия
или окружного усилия
![]() при вращающемся исполнительном механизме
(приводы конвейеров, лебедок, испытательных
стендов), или в виде осевого усилия
при вращающемся исполнительном механизме
(приводы конвейеров, лебедок, испытательных
стендов), или в виде осевого усилия
![]() при поступательном движении исполнительного
механизма (приводы винтовых толкателей,
триммеров летательных аппаратов). В
некоторых случаях задана непосредственно
мощность
при поступательном движении исполнительного
механизма (приводы винтовых толкателей,
триммеров летательных аппаратов). В
некоторых случаях задана непосредственно
мощность
![]() на валу исполнительного механизма. В
качестве кинематической характеристики
привода задана либо линейная скорость
движения исполнительного механизма
(ленты или цепи конвейера, каната лебедки,
винта винтового толкателя и т.п.), либо
угловая скорость или частота вращения
исполнительного механизма или вала
электродвигателя.
на валу исполнительного механизма. В
качестве кинематической характеристики
привода задана либо линейная скорость
движения исполнительного механизма
(ленты или цепи конвейера, каната лебедки,
винта винтового толкателя и т.п.), либо
угловая скорость или частота вращения
исполнительного механизма или вала
электродвигателя.
В задании могут быть
указаны размеры исполнительного
механизма и другие справочные данные:
диаметр D
барабана ленточного конвейера, шаг t
цепи и число зубьев
![]() ведущей звездочки цепного конвейера,
тип резьбы передачи «винт–гайка» и др.
ведущей звездочки цепного конвейера,
тип резьбы передачи «винт–гайка» и др.
Режим нагружения передач, характеризующий распределение рабочей нагрузки по времени, задан типовой, аппроксимированный одной из непрерывных функций (рис. 1.1).
На рисунке по оси
ординат отложено отношение текущего
вращающего момента
![]() к наибольшему длительно действующему
моменту
к наибольшему длительно действующему
моменту
![]() ,
а по оси абсцисс – отношение суммарного
числа циклов
,
а по оси абсцисс – отношение суммарного
числа циклов
![]() нагружения зубчатого колеса вращающим
моментом
нагружения зубчатого колеса вращающим
моментом
![]() к общему числу циклов его нагружения
за весь срок службы передачи.
к общему числу циклов его нагружения
за весь срок службы передачи.
Постоянный режим нагружения (0) характерен для конвейерного автоматизированного производства, тяжелый режим (1) – для горных машин, средний равновероятный (2) – для интенсивно эксплуатируемых машин, средний нормальный (3) – для большинства универсальных машин, легкий (4) и особо легкий (5) – для широкоуниверсальных станков с большим диапазоном регулирования скоростей.

Рис. 1.1. Типовые режимы нагружения передач:
0 – постоянный, 1 – тяжелый, 2 – средний равновероятный,
3 – средний нормальный, 4 – легкий, 5 – особо легкий
При работе привода
помимо рабочей длительно действующей
нагрузки в нем могут возникать
кратковременные пиковые перегрузки
(например, при пуске конвейера). В
техническом задании их величина задана
в виде отношения наибольшей пиковой
нагрузки
![]() к номинальной (наибольшей длительно
действующей) нагрузке
к номинальной (наибольшей длительно
действующей) нагрузке
![]() :
:
![]() .
.
1.2. Разработка кинематической схемы привода
Прежде чем приступить к расчетам, студент должен ознакомиться с конструкциями, подобными заданной, по рекомендуемой учебной литературе, макетам и стендам, представленным на кафедре, в реальных машинах и механизмах. При этом следует уяснить особенности конструкции и эксплуатационные возможности привода, его достоинства и недостатки, назначение отдельных элементов и взаимодействие их в приводе. По согласованию с консультантом можно уточнить предлагаемую в задании схему привода и исходные данные.
Согласно техническому заданию на курсовое проектирование студент составляет кинематическую схему привода [2]. В качестве примера на рис. 1.2 приведена кинематическая схема привода ленточного конвейера. Мощность от электродвигателя через упругую муфту передается на быстроходный вал двухступенчатого коническо-цилиндрического редуктора, от тихоходного вала редуктора мощность через открытую цепную передачу передается на приводной барабан ленточного конвейера (исполнительный механизм).
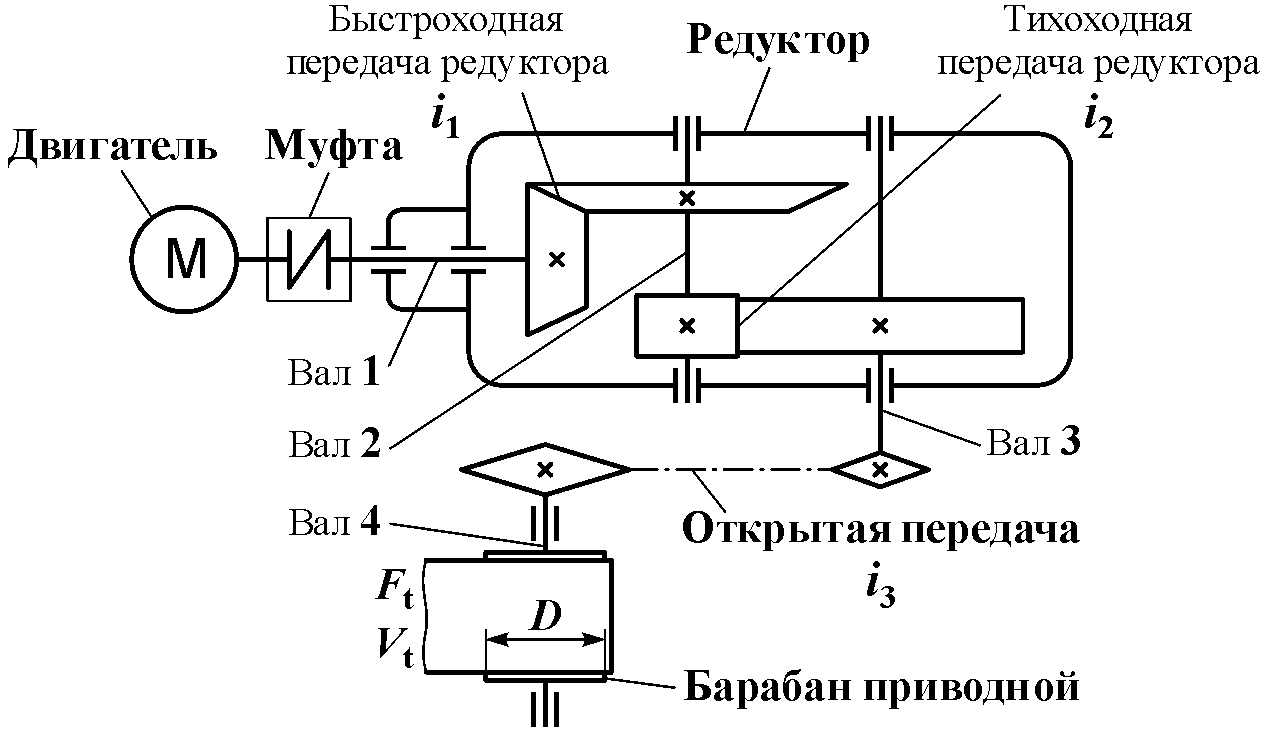
Рис. 1.2. Кинематическая схема привода ленточного конвейера
В пояснительной записке к курсовому проекту приводится кинематическая схема привода с нумерацией валов (см. рис. 1.2). Порядковый номер вала возрастает от быстроходного к тихоходному, причем, если валы соединены муфтой и вращаются с одинаковой угловой скоростью, то им следует присвоить один номер (например, на рис. 1.2 вал двигателя и быстроходный вал редуктора вращаются с одинаковой угловой скоростью и им присвоен номер 1).