

2 Разработка обобщенной структуры рлс
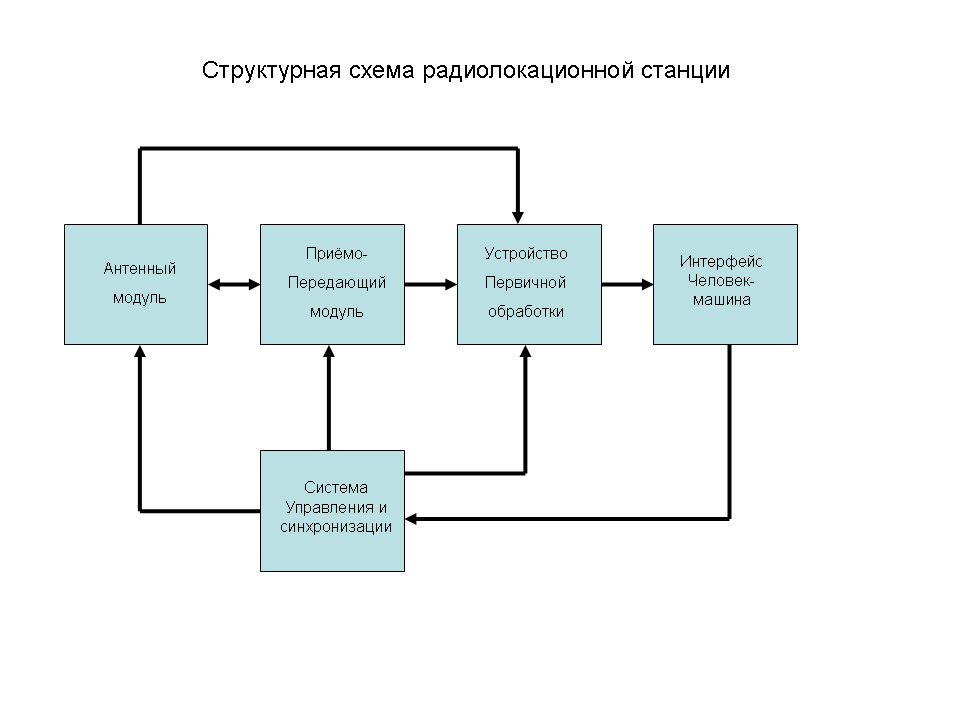
Рисунок 1 – обобщенная структурная схема РЛС.
На рисунке 1 представлена обобщённая структурная схема РЛС.
Антенный модуль служит для приёма и излучения радиоволн. В данной системе используется активная ФАР. Модуль содержит непосредственно антенну, систему позиционирования антенны и набор датчиков для определения ориентации антенны. Система датчиков служит для определения ориентации антенной системы и выдачи этой информации в систему первичной обработки.
Приемо-передающий модуль содержит устройство генерации высокочастотных импульсов с заданными параметрами для передачи через антенный модуль, и устройство приёма отражённых от цели помех. К антенной системе эти устройства подключены через переключатель – коммутирующее устройство, позволяющее переключать антенну на передачу и прием.
В системе первичной обработки информации происходит обнаружение и измерение параметров сигналов, полученных за один период работы РЛС. Совокупность оценок параметров сигналов и их показателей качества формируют радиолокационную метку цели - положение, скорость.
Полученная от системы первичной обработки информация передаётся оператору РЛС через интерфейс человек-машина, в ответ на которую оператор передаёт команды по настройке и управлению РЛС через ИЧМ в систему управления и синхронизации.
Система управления и синхронизации обрабатывает полученные от оператора команды и по ним настраивает РЛС. Также следит за синхронностью работы РЛС.
Интерфейс человек-машина осуществляет визуальное воспроизведение информации, полученной от устройства первичной обработки, а также от системы управления и синхронизации, позволяет оператору передавать команды а систему управления и синхронизации.
3 Определение рабочей длины волны, метода оценки угловых координат, периода повторения зондирующих импульсов, ширины спектра зондирующего сигнала.
В качестве метода определения угловых координат будет применяться моноимпульсный метод, благодаря которому можно получить большую точность измерения угловых координат.
Необходимо проверить, насколько при заданных значениях разрешающей способности по угловым координатам и вероятностных характеристиках обнаружения выполняются требования по точности определения этих координат.
Точность определения угловой координаты определяется по формуле при двухканальном (моноимпульсном) методе определения угловых координат:
![]()
![]() ,
,
где Q – ширина диаграммы направленности (ДН) в данной плоскости, она равна значению разрешения по данной угловой координате.
q – отношение сигнал/шум;
q = 7,9.
При расчёте по формуле (1), точность получаются следующие значения:
![]()
![]()
точность определения азимута:

![]()
точность определения угла места:.
Точность определения азимута и угла места удовлетворяет заданным параметрам.
Для радиолокационных станций наведения длина волны может быть выбрана из ряда 10 см, 5 см, 3 см. Чтобы уменьшить размеры раскрыва антенного полотна при сохранении тех же параметров диаграммы направленности, в качестве рабочей длины волны была выбрана длина волны 3 см.
![]()
![]() см,
см,
![]() ГГц.
ГГц.
Зная максимальную дальность действия станции (r0), можно определить период повторения зондирующих импульсов (Tп):

![]()
Определить ширину спектра излучаемого сигнала (DF), зная разрешающую способность по дальности (DR), можно из следующего соотношения:

![]()

![]()