

Криволинейные ортогональные системы координат
При описании многих физических процессов удобно использовать криволинейные системы координат (не декартовы). Так как при описании тел цилиндрической формы удобней использовать цилиндрическую систему координат и сферическую которые строятся на основе декартовой системы координат.
Цилиндрическая система может быть получена на основе декартовой следующим образом. Предположим, что есть некоторая точка определённая в декартовой системе координат. Построим цилиндр таким образом что бы основание цилиндра лежало в плоскости XOY декартовой системы координат, на основании которой строим, а точка Р на боковой поверхности данного цилиндра.
С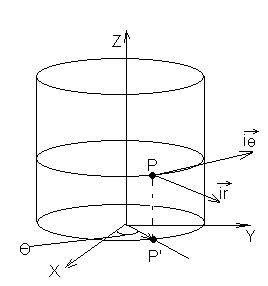 проецируем
точку Р на плоскость XOY
и поведем радиус вектор r
из точки О который является началом как
декартовой системы координат, так и
цилиндрической, в точку Р’ являющейся
проекцией точки Р на плоскость XOY.
Таким образом получим первую координату
цилиндрической системы координат
(радиус r). Угол между OX
и r (Ө). Таким образом мы
получили вторую координату цилиндрической
системы координат. Ось Z
определяет третью координату цилиндрической
системы координат. (r, Ө, Z)
– координаты в цилиндрической системе
координат.
проецируем
точку Р на плоскость XOY
и поведем радиус вектор r
из точки О который является началом как
декартовой системы координат, так и
цилиндрической, в точку Р’ являющейся
проекцией точки Р на плоскость XOY.
Таким образом получим первую координату
цилиндрической системы координат
(радиус r). Угол между OX
и r (Ө). Таким образом мы
получили вторую координату цилиндрической
системы координат. Ось Z
определяет третью координату цилиндрической
системы координат. (r, Ө, Z)
– координаты в цилиндрической системе
координат.
Определим орты данной криволинейной
системы координат. Для этого сделаем
сечение цилиндра плоскостью параллельной
XOY и пересечение данной
плоскости и поверхности цилиндра дает
нам окружность. Проведём из точки Р
единичный вектор
![]() который параллелен r. Этот
орт будет являться первой координатой
r. Проведём единичный
отрезок касающийся полученной окружности
из точки Р в сторону увеличения Ө. -
является второй координатой. Третьим
ортом будет являться отрезок
который параллелен r. Этот
орт будет являться первой координатой
r. Проведём единичный
отрезок касающийся полученной окружности
из точки Р в сторону увеличения Ө. -
является второй координатой. Третьим
ортом будет являться отрезок
![]() - являющийся единичны ортом оси Z.
- являющийся единичны ортом оси Z.
Сферическая система координат:
С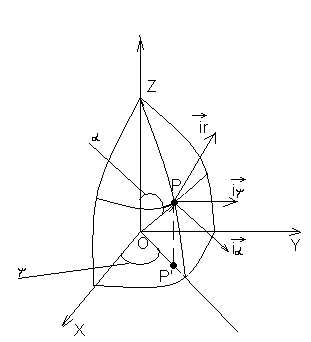 троится
на основе декартовой системы координат.
Предполагаем что некоторая точка
определена в декартовой системе
координат, построим некоторую сферическую
поверхность так что бы искомая точка
лежала на данной поверхности. Проведём
радиус вектор r из точки
О в точку Р и таким образом мы определим
первую координату (r). Угол
отсечённый от OZ между
осью OZ декартовой системы
координат на основании которой строится
сферическая и вектором r
назовем (α) является второй координатой.
Спроецируем точку Р на плоскость XOY
получим Р’. Проведём из точки О в точку
Р’ луч угол между осью OX
и данным лучом отсчитанным от OX
определённый как
троится
на основе декартовой системы координат.
Предполагаем что некоторая точка
определена в декартовой системе
координат, построим некоторую сферическую
поверхность так что бы искомая точка
лежала на данной поверхности. Проведём
радиус вектор r из точки
О в точку Р и таким образом мы определим
первую координату (r). Угол
отсечённый от OZ между
осью OZ декартовой системы
координат на основании которой строится
сферическая и вектором r
назовем (α) является второй координатой.
Спроецируем точку Р на плоскость XOY
получим Р’. Проведём из точки О в точку
Р’ луч угол между осью OX
и данным лучом отсчитанным от OX
определённый как
![]() является третьей координатой сферической
системы координат.
является третьей координатой сферической
системы координат.
Получим орты данной ортогональной
криволинейной системы координат. Для
этого выполним сечение данной сферической
поверхности плоскостью проходящей
через точку Р и осьOZ.
Пресечение данной плоскости и поверхности
сферы даст нам окружность. Из точки Р
отложим единичный вектор
![]() сонаправленный с r. Это
орт будет первой координатой сферической
системы координат. Из точки Р отложим
единичный вектор касающийся полученной
окружности и направленный в сторону
увеличения α – второй орт. Для получения
третьего орта сделаем сечение плоскостью
параллельной XOY и проходящей
через точку Р. Пересечение данной
плоскости со сферой даст нам окружность.
Отложим единичный вектор касающийся
данной окружности и направим в сторону
увеличения
сонаправленный с r. Это
орт будет первой координатой сферической
системы координат. Из точки Р отложим
единичный вектор касающийся полученной
окружности и направленный в сторону
увеличения α – второй орт. Для получения
третьего орта сделаем сечение плоскостью
параллельной XOY и проходящей
через точку Р. Пересечение данной
плоскости со сферой даст нам окружность.
Отложим единичный вектор касающийся
данной окружности и направим в сторону
увеличения
![]() .
.