

4.2. Определение продолжительности переходных процессов.
Уравнения (4.1) и (4.2) позволяют определить продолжительность переходных процессов, например при реостатном пуске. Имеем:
![]()
Откуда
![]()
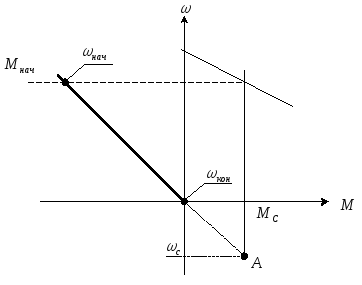
Рис.
4.2![]() ,
а
,
а
![]() определяется как точка пересечения
продолжения тормозной характеристики
с механической характеристикой механизма
(точка А на рис. 4.2)
определяется как точка пересечения
продолжения тормозной характеристики
с механической характеристикой механизма
(точка А на рис. 4.2)
4.3 Расчет нелинейных переходных процессов.
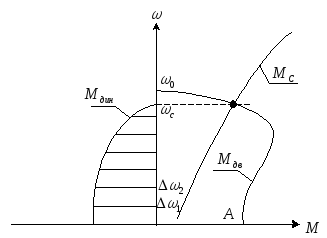
Рис.
4.3
Механические характеристики двигателя и вентилятора приведены на рис. 4.3.
Поскольку характеристики нелинейны, уравнение движения (2.3) аналитически решено быть не может. В этом случае оно решается приближенными численными методами. Простейшим из них является метод Эйлера.
Построим
в левой части графика кривую динамического
момента
![]() .
Разобьём промежуток
.
Разобьём промежуток
![]() ;
;
![]() на произвольное число интервалов
на произвольное число интервалов
![]() .
При малой величине
.
При малой величине
![]() динамический
момент в пределах интервала может быть
принят постоянным. Тогда дифференциальное
уравнение (2.3) может быть заменено
алгебраическим:
динамический
момент в пределах интервала может быть
принят постоянным. Тогда дифференциальное
уравнение (2.3) может быть заменено
алгебраическим:
![]() ,
,
Откуда
![]() ,
и
,
и
![]() .
.
4.4. Потери энергии в переходных процессах.
В переходных процессах двигатель развивает дополнительный динамический момент, который приводит к росту потерь в обмотках двигателя.
Величина потерь за время переходного процесса для двигателя независимого возбуждения определяется как:
 ,
где
,
где
![]() -
потери в цепи якоря двигателя.
-
потери в цепи якоря двигателя.
Рассматривая
пуск двигателя в холостую (![]() )
и заменяя
)
и заменяя
![]() ,
получаем:
,
получаем:
![]()
 (4.4)
(4.4)
При
пуске
![]() ,
,![]() ,
получаем:
,
получаем:
![]()
Кинетическая энергия работающей системы определяется как
![]() .
.
Таким образом, при пуске двигателя потери в якорной цепи равны запасенной кинетической энергии в конце пуска.
При динамическом торможении якорь отключается от сети и замыкается на реостат, поэтому механическая энергия, преобразуясь в электрическую рассеивается в якорной цепи двигателя
![]()
При
торможение противовключением
![]() ,
,
![]() ,
получаем:
,
получаем:
![]() .
.
Потери энергии в асинхронном двигателе складываются из потерь в статоре и роторе. Мощность теряемая в роторе равна:
![]() ,
т.е. потери в роторе АД определяются так
же, как роизвольное число
интерваскогонными численными методами.
Простейшим из них является метод Эйлера.
,
т.е. потери в роторе АД определяются так
же, как роизвольное число
интерваскогонными численными методами.
Простейшим из них является метод Эйлера.
Отсюда вытекает, что и потери энергии в цепи ротора будут определятся так же как и у двигателя независимого возбуждения, т.е. будут пропорциональными кинетической энергии.
Потери в двигателе определяются как:
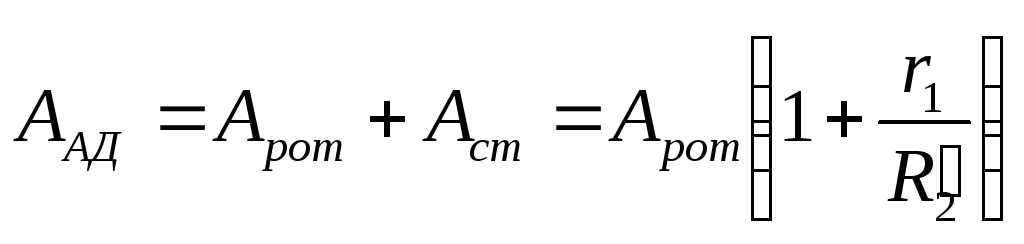 (4.5)
(4.5)
4.5 Методы сокращения потерь в переходных процессах.
Потери могут быть уменьшены путём уменьшения кинетической энергии системы, что достигается уменьшением приведённого момента инерции.
Момент инерции может быть уменьшен:
а) использованием малоинерционных двигателей, имеющих при той же мощности меньший диаметр на большую длину.
б) Применением двух – или многодвигательного электропривода. Расчеты показывают, что суммарный момент инерции двух двигателей половинной мощности существенно меньше момента инерции одного двигателя.
В
приводе с асинхронными короткозамкнутыми
двигателями целесообразно использовать
двигатели с повышенным скольжением.
Увеличенное сопротивление обмотки
ротора этих двигателей способствует в
соответствии с уравнением (4.5) снижению
потерь в переходных процессах. Снижение
потерь может быть достигнуто рациональным
уравнением переходными процессами. В
частности может быть использован
ступенчатый пуск, при котором двигатель
сначала разгоняется до промежуточной
скорости
![]() ,
а затем с этой промежуточной до основной
,
а затем с этой промежуточной до основной
![]() .
Технически такой способ пуска может
реализован в двухдвигательном приводе
постоянного тока путем переключения
двигателей с последовательного соединения
на параллельное, или в асинхронном
приводе с полюсопереключаемом двигателем.
.
Технически такой способ пуска может
реализован в двухдвигательном приводе
постоянного тока путем переключения
двигателей с последовательного соединения
на параллельное, или в асинхронном
приводе с полюсопереключаемом двигателем.
Определим
величину потерь при двухступенчатом
пуске, полагая
![]()
На первой стадии пуска потери равны
На
второй стадии
![]() ,
,
![]() .
В соответствии с уравнением (4.4) Имеем:
.
В соответствии с уравнением (4.4) Имеем:
![]()
Общие потери равны:
![]()
Таким образом, при двухступенчатом пуске потери снижаются в два раза. В общем случае при пуске в k ступеней потери снижаются в k раз.
При
![]() потери
стремятся к 0. Пуск в ход двигателя с
потери
стремятся к 0. Пуск в ход двигателя с
![]() означает
пуск двигателя постоянного тока с
плавным подъемом напряжения, что возможно
в регулируемом приводе, или в частотно
– регулируемом приводе с асинхронным
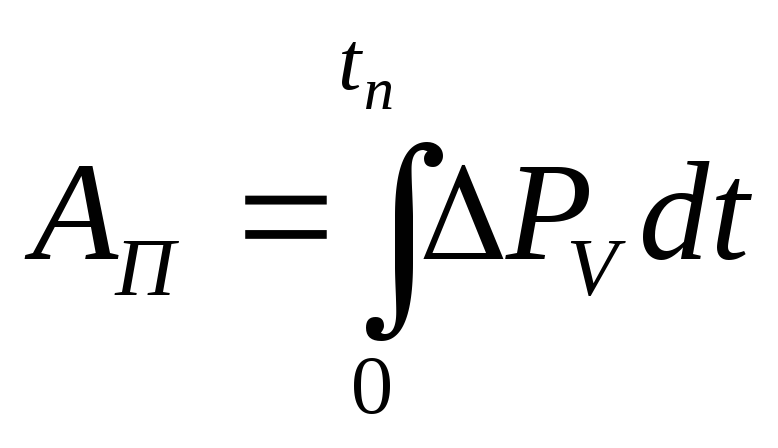
двигателем. Более точный анализ
показывает, что при линейном нарастании
напряжения или частоты потери определяются:
означает
пуск двигателя постоянного тока с
плавным подъемом напряжения, что возможно
в регулируемом приводе, или в частотно
– регулируемом приводе с асинхронным
двигателем. Более точный анализ
показывает, что при линейном нарастании
напряжения или частоты потери определяются:
![]() ,
где
,
где
АПО – потери при прямом пуске, Тм – механическая постоянная привода, tП – время пуска.