

3.5 Тормозные режимы асинхронного двигателя.
а)
рекуперативное (с возвратом энергии в
сеть) возможно при
![]()
![]()
б) торможение противовключением возникает когда ротор и поле вращаются в разные стороны, а скольжение S1.
Механические характеристики в этом режиме являются продолжением двигательного режима в область отрицательных скоростей.
Для короткозамкнутых двигателей этот режим характеризуется большим током, превышающим пусковой и относительно небольшим тормозным режимом. При торможении двигателя с фазным ротором вводится тормозной реостат, существенно увеличивающий тормозной момент и уменьшающий тормозной ток.
При динамическом торможении статор двигателя отключается от сети и на две фазы подается постоянный ток. Вид тормозной характеристики определяется величиной постоянного тока и сопротивления цепи ротора. При увеличении тока подмагничивания увеличивается максимальный момент, при увеличении сопротивления ротора возрастает скорость, при которой достигается тормозной момент, как это показано на рис. 3.17.

Рис.
3.17
-
Характеристика двигательного режима
-
Торможение с возвратом энергии в сеть
-
Противовключение с разными сопротивлениями ротора.
-
Динамическое торможение с разными сопротивлениями ротора.
4. Переходные процессы в электроприводе.
Переходной процесс – процесс перехода системы из одного установившегося состояния в другое установившееся состояние. Переходной процесс описывается дифференциальными уравнениями. Порядок дифференциального уравнения определяется количеством накопителей энергии в системе. В электроприводе накопителями энергии являются: движущиеся массы, обмотки эл. машины, упруго деформируемые элементы механической части, например валы. Для упрощения математического описания и облегчения решения уравнений часто пренебрегают элементами с малым запасом энергии.
4.1. Механический переходный процесс при механической
характеристике
двигателя и
![]() .
.
Пренебрегаем индуктивностью обмоток и упругостью элементов механической передачи. Тогда поведение системы в переходных процессах описывается уравнением (2.3):
![]() ,
,
которое при рассматриваемых условиях является линейным. Механическая характеристика двигателя может быть задана в виде одного из двух равноправных уравнений:
![]() ,
,
![]() ;
;
где
![]() - скорость идеального холостого хода,
- скорость идеального холостого хода,
Мк – момент короткого замыкания.
Подставляя второе из этих уравнений в уравнение движения, получаем:
![]()
Делим
на Мк и умножаем
![]() :
:
![]() .
.
Учитывая,
что
![]() ,
получаем
,
получаем
![]()
Обозначаем:
![]() - механическая постоянная времени
- механическая постоянная времени
Решение уравнения имеет вид:
![]() (4.1)
(4.1)
Аналогично для момента:
![]() (4.2)
(4.2)
И
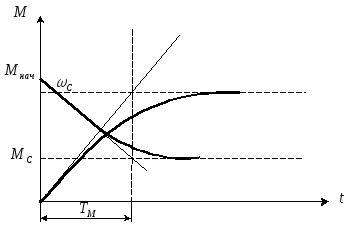
Момент и скорость меняется по экспоненте. Теоретически экспоненциальный процесс длится бесконечно долго. Практически переходный процесс заканчивается за время.
![]()
Рис.
4.1
Механическая постоянная Тм, через параметры электропривода определится как:
![]() -
для двигателя независимого возбуждения,
-
для двигателя независимого возбуждения,
![]() -
для асинхронного двигателя,
-
для асинхронного двигателя,
Где R2 – полное сопротивление цепи ротора
rр – сопротивление обмотки ротора.
На графике переходного процесса Тн определяется как отрезок на линии установившегося значения момента или скорости, отсекаемый касательной, проведенной и соответствующей кривой (рис. 4.1).