-
Варианты заданий
Таблица 1. Варианты заданий
|
Вариант |
Схема (табл. 4) |
Параметры |
|
1. Двухконтурная система регулирования с П-регулятором скорости (без учета ОС по ЭДС в ДПТНВ) |
1 |
|
|
2. Двухконтурная система регулирования с ПИ-регулятором скорости (без учета ОС по ЭДС в ДПТНВ) |
1 |
|
|
3. Двухконтурная система регулирования с П-регулятором скорости с фильтром в канале задания (без учета ОС по ЭДС в ДПТНВ) |
2 |
|
|
4. Двухконтурная система регулирования с ПИ-регулятором скорости с фильтром в канале задания (без учета ОС по ЭДС в ДПТНВ) |
2 |
|
|
5. Двухконтурная система регулирования с П-регулятором скорости (с учетом ОС по ЭДС в ДПТНВ) |
3 |
|
|
6. Двухконтурная система регулирования с ПИ-регулятором скорости (с учетом ОС по ЭДС в ДПТНВ) |
3 |
|
|
7. Трехконтурная система регулирования с П-регулятором скорости (без учета ОС по ЭДС в ДПТНВ) |
4 |
|
|
8. Трехконтурная система регулирования с ПИ-регулятором скорости (без учета ОС по ЭДС в ДПТНВ) |
4 |
|
|
9. Трехконтурная система регулирования с П-регулятором скорости (с учетом ОС по ЭДС в ДПТНВ) |
5 |
|
|
10. Трехконтурная система регулирования с ПИ-регулятором скорости (с учетом ОС по ЭДС в ДПТНВ) |
5 |
|
|
11. Схема управления курсом морского судна (1) |
6 |
|
|
12. Схема управления курсом морского судна (2) |
7 |
|
Таблица 2. Параметры объектов (схемы 1-5)
|
Элемент схемы |
ПФ |
Коэффициенты |
|
Регулятор тока |
|
|
|
СИФУ |
|
|
|
ДПТНВ |
|
|
|
Датчик тока |
|
|
|
Датчик скорости |
|
|
|
Внешнее воздействие (момент нагрузки) |
|
|
Таблица 3. Параметры объектов (схемы 6, 7)
|
Элемент схемы |
ПФ |
Коэффициенты |
|
Внешнее воздействие (ветро-волновое воздействие) |
|
|
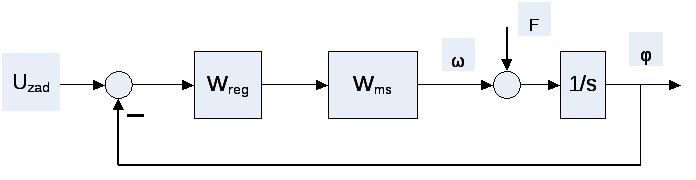
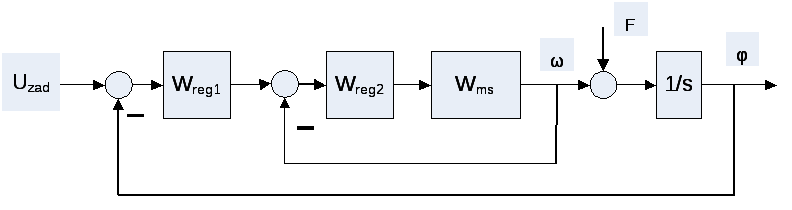
Таблица 4. Схемы для моделирования
|
№ схемы |
Схема |
|
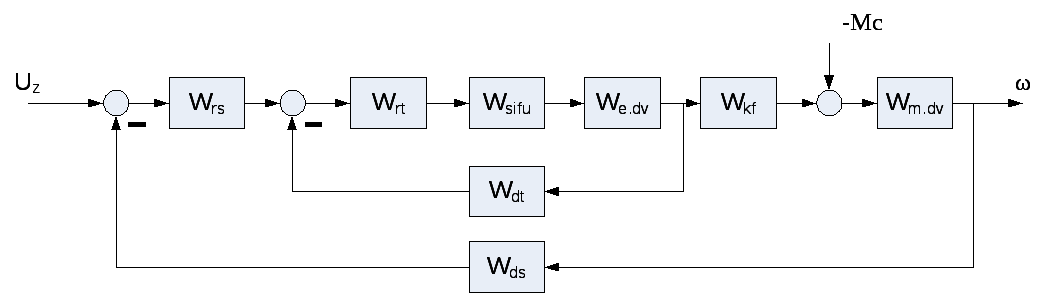
1 |
|
|
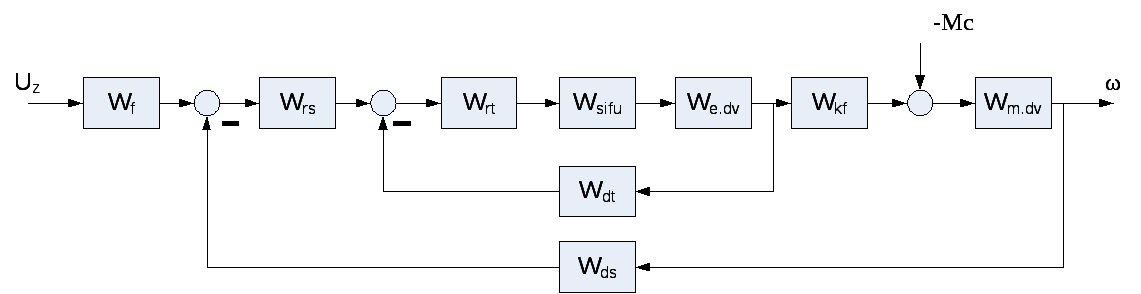
2 |
|
|
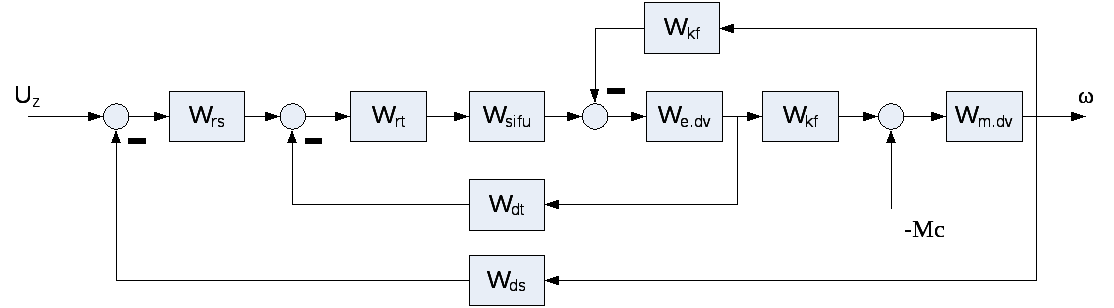
3 |
|
|
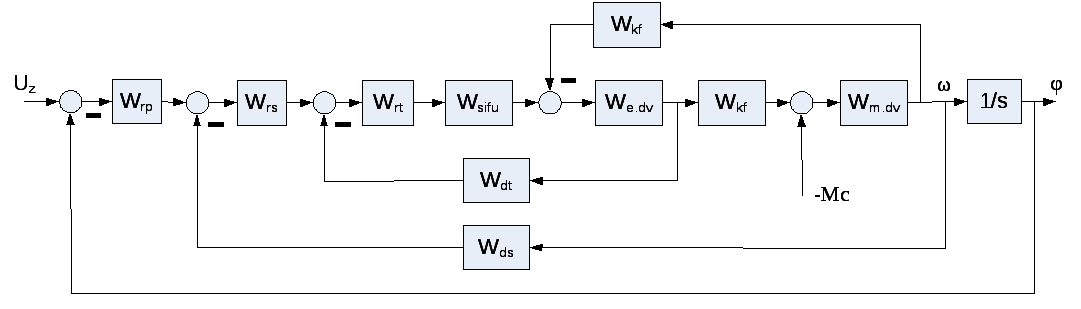
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|