

3.3. Определение кинематических характеристик механизма.
Определить координаты и положения точек, аналоги скоростей и аналоги ускорений точек и звеньев механизма. Расчет проводится графически методом планов для одного расчетного положения и аналитически на компьютере для 12 положений.
3.3.1. Графическая кинематика механизма.
Необходимо
построить 12 планов положений и один
план аналогов скоростей для заданного
угла
![]() .
.
3.3.1.1. Построение планов положений.
Выбирается
масштабный коэффициент длин
![]() .
.
Чертежные отрезки:
![]()
![]()
![]()
Т.к. механизм 2-го класса, то построение планов положений ведется геометрическим методом засечек, начиная от дальнего крайнего положения, которое обозначается первым (см. поз.1 листа 1 ).
Показывается
траектория движения точки S2
шатуна. Выделяется расчетное заданное
положение №2 при
![]() .
Для заданного положения обозначаются
отрезки координат X’,
Y’ и определяются
графически координаты точек и звеньев
.
Для заданного положения обозначаются
отрезки координат X’,
Y’ и определяются
графически координаты точек и звеньев
![]()
![]()
![]()
![]()
3.3.1.2. Построение плана аналогов скоростей.
Линейный аналог скорости вращающейся точки А кривошипа:
![]()
Принят
масштабный коэффициент аналогов
![]()
Отрезки аналога:
![]()
Т.к.
вектор аналога
![]() ,
то и отрезок
,
то и отрезок
![]() (поз.2 листа 1). Аналог скорости т.В ползуна
определим по векторным уравнениям:
(поз.2 листа 1). Аналог скорости т.В ползуна
определим по векторным уравнениям:
![]()
![]()
Точку
S2 шатуна строим по
свойству подобия на отрезке плана
![]()
![]()
Замеряем отрезки плана и рассчитываем аналоги скоростей:
![]()
![]()
![]()
![]()

3.3.2. Аналитическая кинематика механизма.
Используем метод векторный контуров. Расчетная схема механизма представлена на рис.3.4.
C 3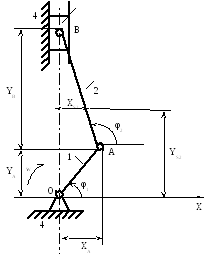
Алгоритм расчета координат, аналогов скоростей и аналогов ускорений берем из литературы [2] на стр.17.
Алгоритм
расчета Цифровой расчет для
положения №2 при
![]()
Координаты
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
аналоги скоростей
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
аналоги ускорений
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Сравниваем полученные аналитические результаты с графическими результатами из планов в табл.2 .
Таблица 2
|
Сравниваемы параметры |
Координаты |
Аналоги скоростей |
|||||
|
xB |
xS2 |
yS2 |
|
U3,1 |
U2,1 |
Us |
|
|
Аналитический результат
|
0,2639 |
-0,01626
|
0,1205 |
96,46
|
0,0299
|
0,1963
|
0,038
|
|
Графический результат
|
0,2635 |
-0,0165 |
0,1195 |
96,1 |
0,03 |
0,1945 |
0,0365 |
|
% расхождения |
0,152 |
1,48 |
0,83 |
0,37 |
0,33 |
0,917 |
3,95 |