

Глава 3. Кинематика точки
Положение
точки в системе отсчета задается
вектором положения как функцией
как функцией
времени, проведенным в точку из некоторого неподвижного в системе отсчета центра A:






А




Траекторией
называется кривая, по которой движется
точка, скоростью
 –
производная по
–
производная по
времени
вектора положения R
, ускорением
 -
производная от вектора скорости
-
производная от вектора скорости

 .
(3.1)
.
(3.1)
Из определения производной вектора следует, что вектор скорости направлен по
касательной к траектории. Собственно говоря, формулами (3.1) вся кинематика точки и
исчерпывается; все технические трудности связаны лишь с выбором системы координат.
Упражнение 1. Исходя из определения производной вектор-функции от скалярного
аргумента
 показать, что
показать, что
1)
 (производная скалярного произведения)
(производная скалярного произведения)
2)
 (производная векторного произведения
(производная векторного произведения
3)
Если
 ,
то
,
то

 (продифференцировать квадрат модуля,
равный
(продифференцировать квадрат модуля,
равный
 ).
).
2.1 Скорость и ускорение в декартовой системе координат.
В
декартовой системе вектор положения
задается в виде
 , где
, где
 -
-
координаты
вектора, а
 ,
, – ортонормированный базис, т.е. базисные
векторы
– ортонормированный базис, т.е. базисные
векторы
единичные и взаимно-перпендикулярные. В этом случае координаты равны проекциям
вектора
на оси, задаваемые базисными векторами:
 .
.
Векторы скорости и ускорения равны

2.2 Скорость и ускорение в цилиндрической системе координат
Вектор положения точки задается как функция цилиндрических координат r,,z :
 (3.2)
(3.2)
В цилиндрической системе координат, как и в любой другой системе, вводятся базисные
векторы
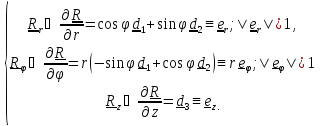 (3.3)
(3.3)
Z










z

r
Y




X

Базисные векторы направлены по касательным к так называемым координатным линиям –
линиям, получающимся при изменении только одной координаты.
Использование
единичных базисных векторов
 удобно
тем, что координаты
удобно
тем, что координаты
вектора в единичном базисе имеют ту же размерность, что и сам вектор.
Дифференцируя (3.2), получим с учетом (3.3)
 =
=
 (3.4)
(3.4)
Дифференцируя
(3.4) и учитывая, что
 , будем
иметь
, будем
иметь
 (3.5)
(3.5)
Упражнение 2. Найти скорость и ускорение точки, движущейся по цилиндру .
 (винтовая
линия)
(винтовая
линия)




