

4 Обробка результатів досліду
4.1 Накреслити характеристику холостого ходу генератора постійного струму, знайти величину Ем/Uн , виразивши її у відсотках, а також визначити коефіцієнт К, який характеризує стан магнітного насичення.
4.2 Накреслити зовнішню та регулювальну характеристики генератора.
4.3. Вирахувати відсоткове підвищення, напруги генератора при переході від номінального навантаження до режиму холостого ходу.
-
Контрольні запитання
-
При яких умовах можливе самозбудження генератора паралельного збудження?
-
Який струм небезпечний для генератора паралельного збудження?
-
Як залежить від швидкості обертання якоря струм короткого замикання?
-
Покажіть зовнішню характеристику генератора паралельного збудження і поясніть її?
-
Як змінюється магнітний потік збудження при збільшенні навантаження?
Лабораторна робота №2 випробування електродвигуна постійного струму паралельного збудження
МЕТА РОБОТИ: Ознайомитись з конструкцією електродвигуна постійного струму. Вивчити способи пуску, зміни напрямку обертання та регулювання швидкості електродвигуна постійного струму. Випробувати електродвигун методом навантажувального генератора. Побудувати механічну характеристику та робочі криві електродвигуна, а також визначити номінальні значення величин, що характеризують його роботу.
1 Основні теоретичні положення
Електродвигун постійного струму являє собою електричну машину, яка перетворює електричну енергію постійного струму, що підводиться від мережі, в механічну енергію, яка передається на вал робочого механізму. В залежності від способу приєднання обмотки збудження до обмотки якоря електродвигуни поділяються на двигуни паралельного, послідовного та змішаного збудження, причому останнє може бути з узгодженим або зустрічним включенням обмотки збудження.
При використанні машини постійного струму паралельного збудження в режимі двигуна безпосередній запуск від мережі при номінальній напрузі як правило не може бути здійснений внаслідок великого пускового струму
Іn=U/Ra (2.1)
де Ra – опір кола якоря, яке вимірюється долями Ома.
Пусковий струм може перевищувати номінальний струм машини в 10-50 раз, що являє небезпеку для обмотки якоря, колектора та щіток. З метою зменшення величини пускового струму в коло якоря на період пуску вводять додатковий регулюючий опір Ra, який називають пусковим реостатом. Наявність Rg, веде до зменшення струму в момент включення двигуна рівний
In=U/(Ra+Rg) (2.2)
Як правило, Rg підбирають з міркувань, щоб пусковий струм був в межах (2÷2,5) Ін, де Ін-номінальний струм електродвигуна.
Електродвигуни постійного струму невеликої потужності (порядка декількох одиниць кВт) можуть підключатись безпосередньо до мережі по схемі безреостатного запуску. Пуск таких двигунів супроводжується сплеском струму до Іn=(6÷8) Ін, а деколи і більше. Обертаючий момент, який розвиває електродвигун, визначається таким виразом
М = СmФІa (2.3)
Для того щоб отримати найбільший момент під час пуску двигуна, необхідно забезпечити максимальний магнітний потік Ф, що досягається повним виведенням регулювального реостата Rр (рис.6) з кола збудження.
Обертова обмотка якоря перетинає нерухомі магнітні силові лінії полюсів машини і в ній наводиться електрорушійна сила
Е=Сe Фа (2.4)
Ця ЕРС спрямована проти струму Іa, який тече в обмотці якоря.
Коефіцієнти Сm та Сe, які входять в вирази (2.3) та (2.4), залежать від конструктивних елементів машин. Виникаюча ЕРС Е по мірі збільшення швидкості обертання викликає зменшення струму в якорі, внаслідок чого обертаючий момент електродвигуна почне зменшуватись (див. (5) та (6))
I= (U-е) /(Ra+Rg)=(U-СeФn)/(Ra+Rg) (2.5)
Для того щоб запобігти зменшенню момента, а також збільшення часу пускового періоду, необхідно під час розгону електродвигуна поступово зменшувати опір пускового реостату Rg (рис.б) і до кінця пуску звести його до нульового значення. Таким чином, при роботі, яка відбувається при виведеному пусковому реостаті (Rg=0) струм в колі якоря визначається співвідношенням
I= (U-СeФn) / Ra (2.6)
і різниця між наведеною ЕРС Е та підведеною напругою U буде незначна. Якщо при пуску двигун почав обертатись в протилежний бік, його необхідно зреверсувати для чого слід змінити напрямок струму в обмотці якоря збудження. При цьому одна з величин виразу (2.3) поміняє свій знак, і обертаючий момент почне діяти в другий бік, якір змінить напрямок обертання на протилежний.
Наявність додаткових полюсів в електродвигуні забезпечить хорошу комутацію без іскроутворення на колекторі та відсутності зміщення фізичної нейтралі під час зміни навантаження на валу дозволяє закріпити щітки на геометричній нейтралі машини.
Визначення положення геометричної нейтралі засновано на тому, що в електродвигунах з додатковими полюсами зсув щіток з геометричної нейтралі проти напрямку обертання якоря приводить внаслідок послаблення результуючого магнітного поля до збільшення швидкості, а при зсуві щіток в напрямку обертання внаслідок намагнічування до зменшення швидкості обертання якоря.
Таким чином, якщо виявиться, що при різних напрямках обертання якоря електродвигуна та однаковому його навантаженні на валу величини швидкостей будуть різні, то щітки стоять не на геометричній нейтралі, і їх необхідно зміщувати доти, поки не вийде однакове значення швидкостей в обох напрямках обертання.
Швидкість обертання якоря електродвигуна паралельного збудження при наявності в колі якоря додаткового опору визначається співвідношенням
n=(U-Іa(Ra+Rg))/СeФ (2.7)
де U - напруга на затискачах якоря;
Ф - величина магнітного патоку машини.
Залежність швидкості обертання електродвигуна від струму якоря Іa у відповідності з рівнянням (2.7) може бути представлена пучком прямих (рис.2.1), якій являють собою швидкісні характеристики.
Ці прямі виходять із однієї точки, розміщеної на осі ординат, яка являє собою швидкість обертання ідеального холостого ходу.
Швидкість обертання при ідеальному холостому ході можна легко визначити по номінальних даних електродвигуна
n0=nH(UH/UH-ІHRa) (2.8)
д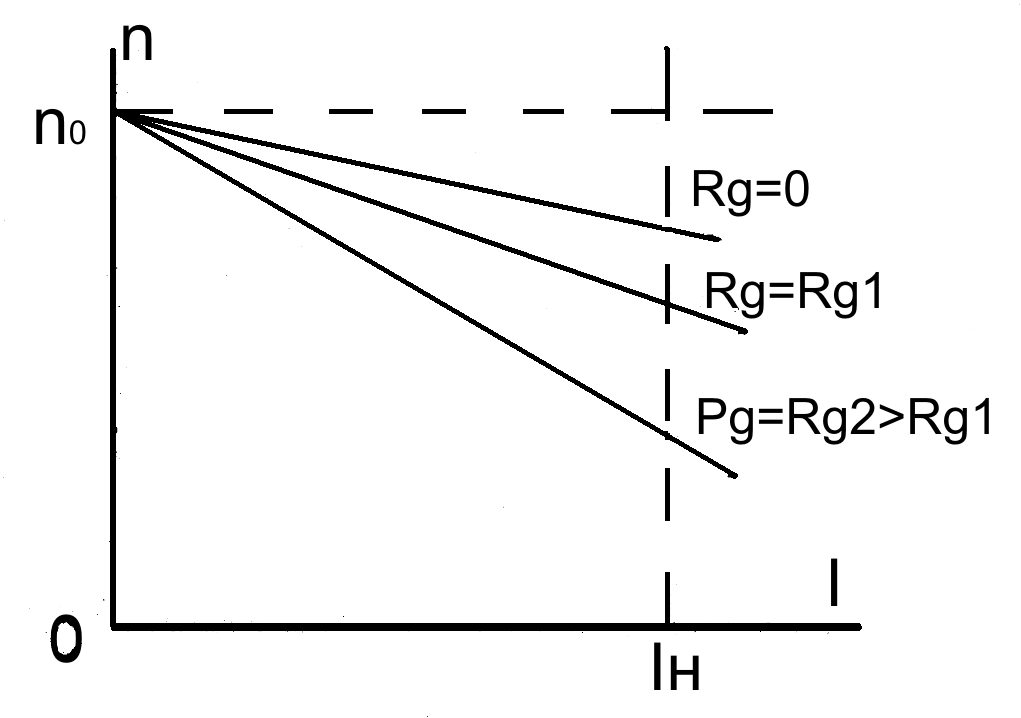 е
UH,
ІH,
nH
- відповідно
паспортні значення напруги, струму та
швидкості обертання електродвигуна.
е
UH,
ІH,
nH
- відповідно
паспортні значення напруги, струму та
швидкості обертання електродвигуна.
Рисунок 2.1 - .Швидкісні характеристики електродвигуна постійного струму паралельного збудження
Швидкість обертання ідеального холостого ходу, не слід путати з швидкістю обертання nx при холостому ході електродвигуна.
При холостому ході струм якоря Іa≠0, так як електродвигун розвиває невеликий момент, перемагаючий втрати обертання.
При ідеальному холостому ході М=0, що може бути досягнуто в тому випадку, якщо до вала якоря електродвигуна прикладений зовнішній момент, який покриває втрати обертання.
Як видно з рис.2.1, найбільшою жорсткістю відрізняється характеристика, отримана при Rg=0, а введення додаткового опору Rg в коло якоря пом’якшує її і може при достатньо великому значені Rg зробити роботу електродвигуна нестійкою, так як зміни навантаження на валу будуть супроводжуватись значною швидкості обертання.
Регулювання швидкості обертання цим методом неекономічне внаслідок теплових втрат на опорі.
З співвідношення (2.7) витікає, що регулювати швидкість двигуна постійного струму можна також за рахунок величини напруги U, яка підводиться до якірної обмотки, або величини магнітного потоку машини Ф.
Зміни напруги U, яка підводиться до якоря, можна досягнути в випадку живлення його від окремого генератора незалежного збудження, а зміни величини магнітного потоку Ф при паралельному збудженні двигуна досягається включенням послідовно з обмоткою збудження регулювального реостата, розрахованого на струм збудження, який складає 1-5% від номінального струму машини.
Перший спосіб потребує громіздких установок, необхідних для плавного регулювання величини напруги, а другий дає плавне та економічне регулювання швидкості обертання.
Поріг підвищення швидкості обертання обмежений умовами комутації, механічною міцністю та зростанням струму якоря при постійному, моменті опору на валу машини.
В каталогах сучасних машин постійного струму для кожного, електродвигуна крім його номінальної швидкості обертання nн приводиться ще і найбільша nmax котра при зменшенні або скидані навантаження не повинна збільшуватись більше ніж на 20%.
Для характеристики регулювальних властивостей електродвигуна будують криві, які показують зміну швидкості обертання від величини напруги U на затискачах якоря при незмінному струмі збудження Із, або при зміні струму збудження Із та постійній напрузі U на затискачах якоря при холостому ході машини тобто n=ƒ(U) при І3=соnst і n=ƒ(І3) U=соnst, які знімають експериментальним шляхом і мають вигляд, зображений на рис.2.2 та 2.3.
Номінальна зміна швидкості обертання якоря при переході від режиму холостого ходу (n=nx) до номінального навантаження (nH=n) невелика і як правило не перевищує (2÷10%) nH в залежності від потужності та типу машини
∆n=(nx – nH)/ nH х100%. (2.9)
При роботі машин постійного струму в режимі електродвигуна мають місце, магнітні, електричні та додаткові втрати.
Коефіцієнт корисної дії
η=P2/P1 (2.10)
де P2 та P1-потужність яка споживається і віддається двигуном.
Потужність P1 яка підводиться до електродвигуна, визначається за формулою
Р1=U(Ia+I3) (2.11)
де U-напруга мережі, яка живить двигун;
Іa та І3-струми, які протікають відповідно в колі якоря та обмотці збудження.
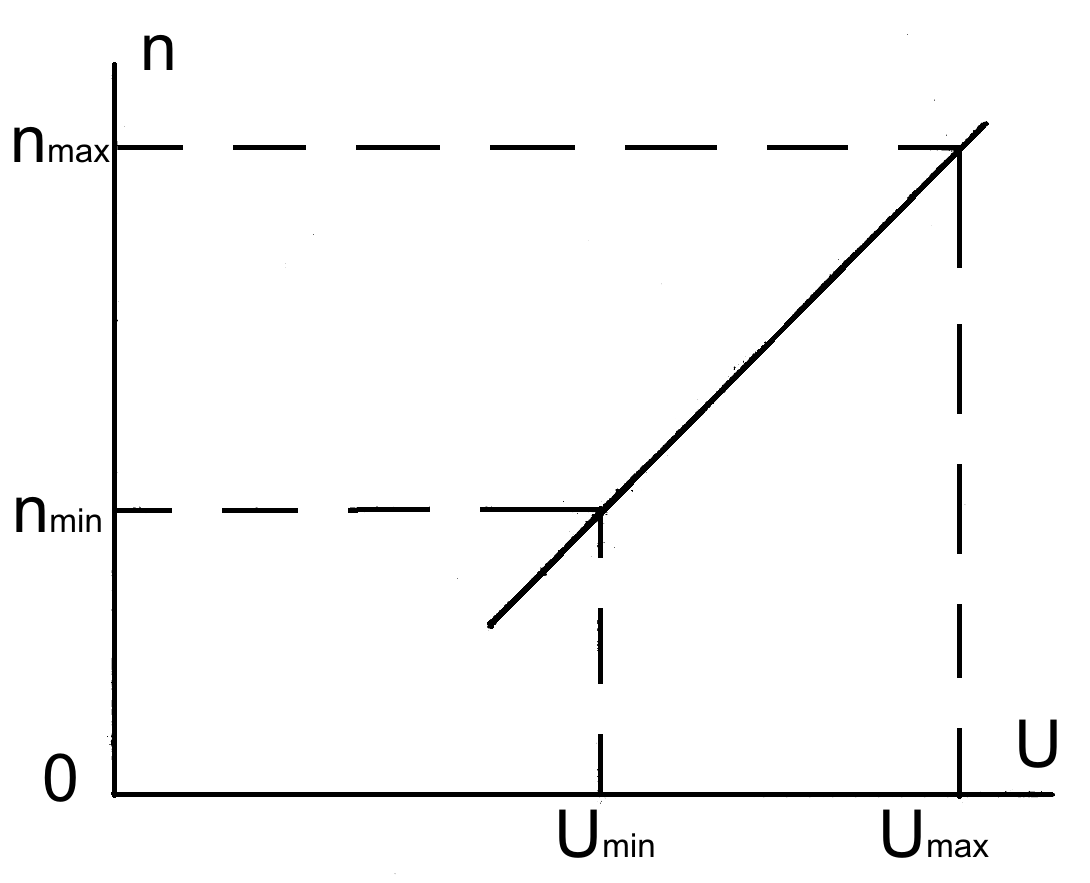
Рисунок 2.2.- Залежність швидкості обертання якоря електродвигуна постійного струму від величини напруги на його затискачах
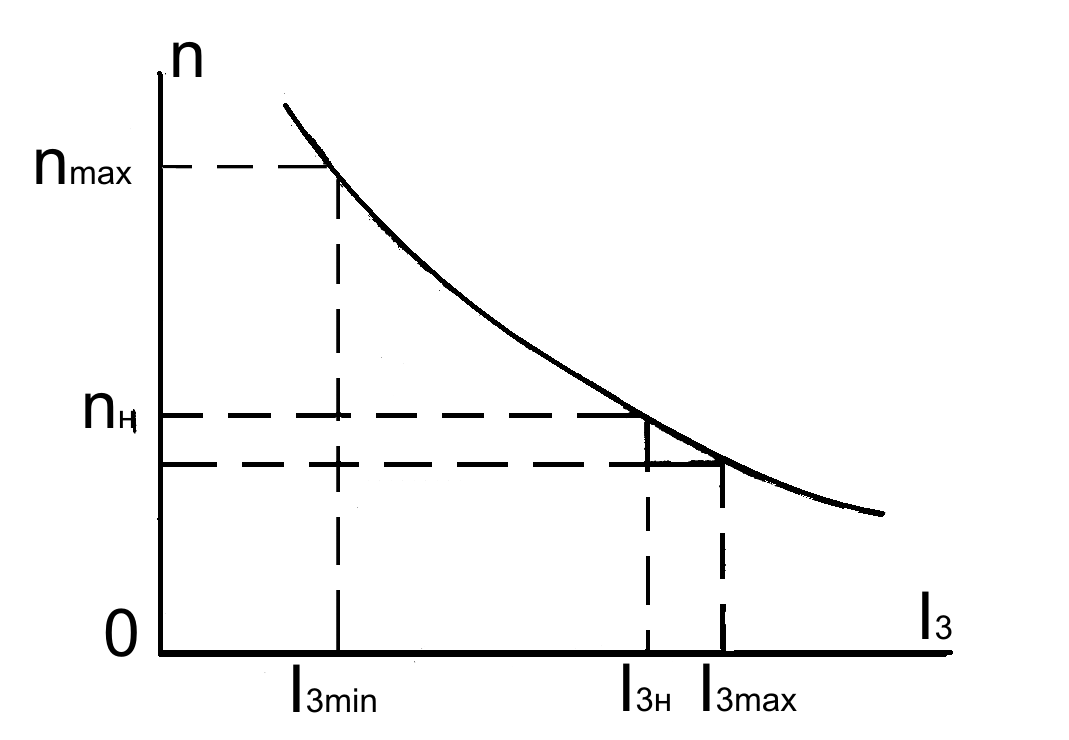
Рисунок 2.3.- Зміна швидкості обертання якоря електродвигуна постійного струму від величини його струму
Потужність P2, яка віддається електродвигуном на валу, визначається методом навантажувального генератора, з’єднаного з випробовуваним електродвигуном за допомогою муфти.
Потужність, яку віддає навантажувальний генератор рівна
РГ=UГ ІГ (2.12)
де UГ та ІГ- відповідно напруга та струм навантажувального генератора постійного струму.
ККД генератора
η=2РГ/(Р1+ Р2) (2.13)
Вираз (2.13) справедливий у випадку однакових по потужності спарованих машин.
Користуючись виразом (2.13), будують залежність п=f(Рг). Виходячи з цієї залежності, знаходять потужність, яку віддає електродвигун, який випробовується
Р2=РГ/ ηГ (2.14)
де ηГ - значення ККД навантажувального генератора, яке відповідає певному режиму роботи.
Момент, який розвиває електродвигун, визначається із співвідношення
М=Р2/ω2=Р2/πn2 (2.15)
де n2— швидкість обертання якоря в об/хв.
Робочі властивості електродвигуна постійного струму паралельного збудження характеризуються його механічною характеристикою n=ƒ(М) (рис.2.4), а також робочими кривими n=ƒ(Р2), М=ƒ(Р2), І=ƒ(РГ) η=ƒ(Р2), Р1=ƒ(Р2), (рис.2.5), які знімаються при U=соnst та І3=соnst.
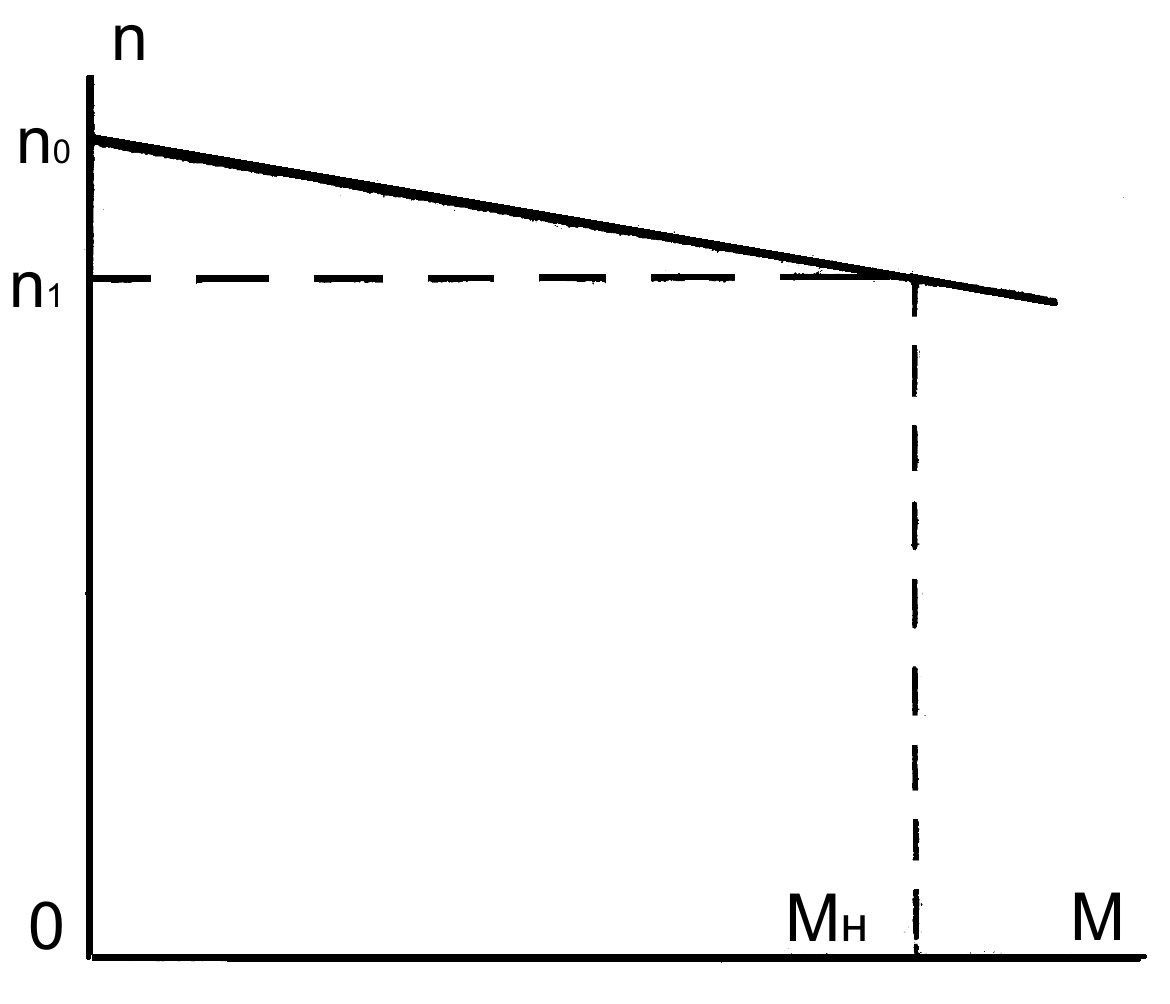
Рисунок 2.4.- Механічні характеристики електродвигуна постійного струму
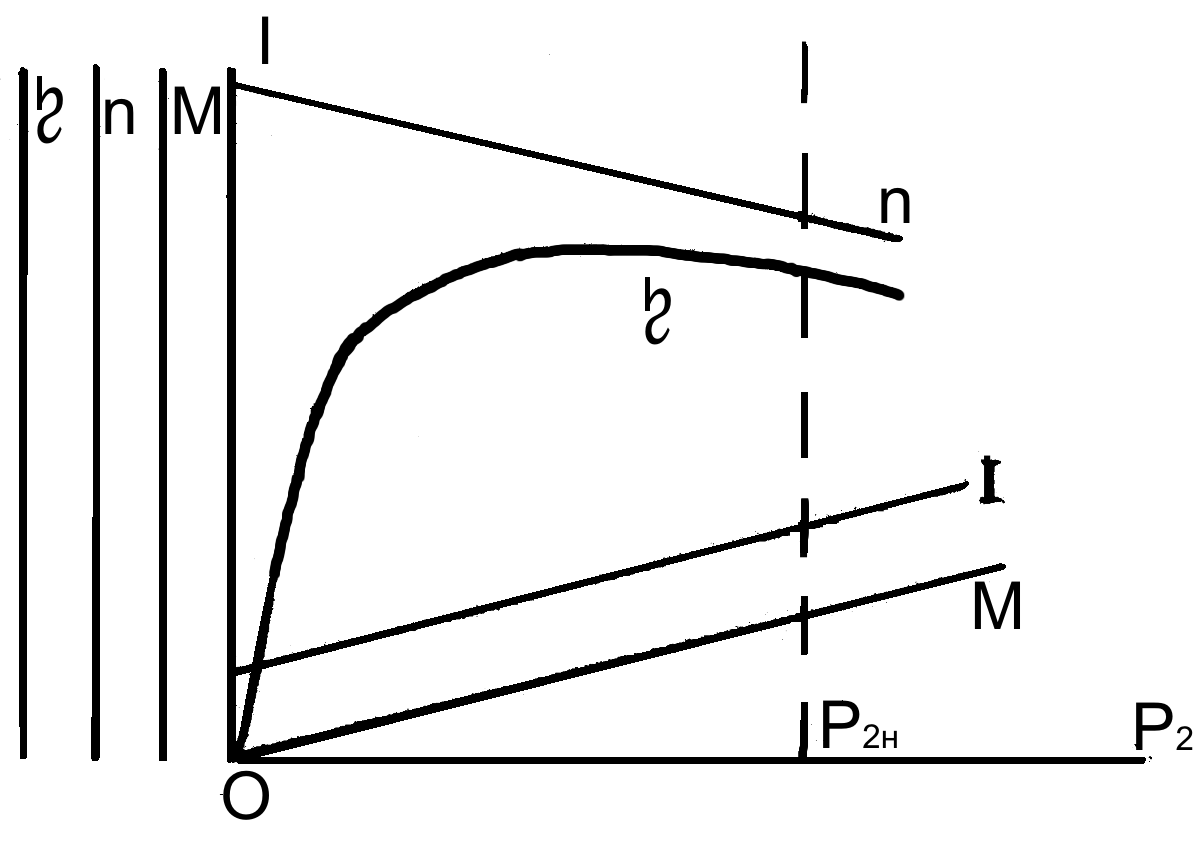
Рисунок 2.5 - Робочі характеристики електродвигуна постійного струму паралельного збудження