

5.5. Равновесие и устойчивость
Механика — наука о движении, но состояние покоя есть частный случай движения. Наиболее «рафинированное» состояние покоя (или движения с постоянной скоростью) присуще уединенному телу, но этот случай представляет собой идеализированную модель и никогда не реализуется. Наблюдаемое в принципе состояние покоя в системе отсчета, которую мы с необходимой точностью можем считать инерциальной, всегда сводится к одному из двух частных случаев.
1. Силы, действующие на тело, столь малы, и/или характерное время
задачи столь коротко, что в пределах точности эксперимента либо точности решения теоретической задачи мы вправе пренебречь ускорением. Если ∆х — характерный пространственный масштаб, a ∆t — временной, F — масштаб действующей силы, а М — массы, то мы можем рассматривать тело как покоящееся при условии
![]()
2. Другой возможный случай, в меньшей степени обусловленный малыми характерными временами, — случай равновесия. Как было определено в гл. 3, сила есть вектор, а второй закон Ньютона (3.4) — закон векторный.
Мы уже отмечали, что это обстоятельство — обобщение огромного массива экспериментальной информации, и что вектор — величина, не просто определяющаяся модулем и направлением, но и обладающая некоторыми специальными свойствами, в частности, она подчиняется принципу суперпозиции. Как следствие, если к телу приложены две, три и т. д. силы, то ускорение определяется их векторной суммой:
Равновесие материальной точки означает, что векторная сумма сил, к ней
приложенных, равна нулю:
![]() (5.29)
(5.29)
Если же речь идет о равновесии макроскопического тела, одного условия (5.29) недостаточно. К особенностям движения и равновесия тела конечных размеров мы обратимся в гл. 7, здесь же ограничимся бесспорным обобщением формулы (5.29): тело пребывает в равновесии, если для любой из материальных точек («физически бесконечно малых объемов»), каковые из этого тела можно выделить, выполнено условие (5.29), включающее как внешние силы, приложенные непосредственно к данному элементу, так и силы взаимодействия с другими элементами данного тела. Разумеется, ни для макроскопического тела, ни даже для такого, которое можно представить как материальную точку, равенство (5.29) никогда не выполняется с совершенной точностью, однако условие малости, позволяющее пренебречь ускорением, налагается уже не на каждую из действующих сил, но лишь на их векторную сумму.
Условия равновесия тел рассматриваются обычно в разделе теоретической механики, именуемом статикой. Мы не будем в нашем курсе изучать ее детально, но остановимся на одном из важнейших вопросов как в механике, так и вообще в физике — проблеме устойчивости равновесия.
Помимо точности, с которой выполнено само условие равновесия (5.29), существует еще одна причина, способная выводить из равновесия тело или систему тел. Она заключается в хаотических внешних воздействиях, которые невозможно учесть в рамках (5.29). Они могут иметь, например, тепловую природу (поскольку тепловые эффекты обусловлены движением на молекулярном уровне), динамикой Вселенной («свет далекой звезды» вполне может нарушить равновесие идеальной системы), но даже и «замороженная» в мысленном эксперименте Вселенная не будет свободна от квантовых флуктуации (это предмет следующего тома нашего курса).
Таким образом, равновесие лишь постольку реализуемо, поскольку механическая система устойчива по отношению хотя бы к достаточно малым внешним воздействиям. Наука об устойчивости сложна и обширна, но мы введем некоторые основные понятия на примере одномерной устойчивости равновесия материальной точки — см. рис. 5.11.
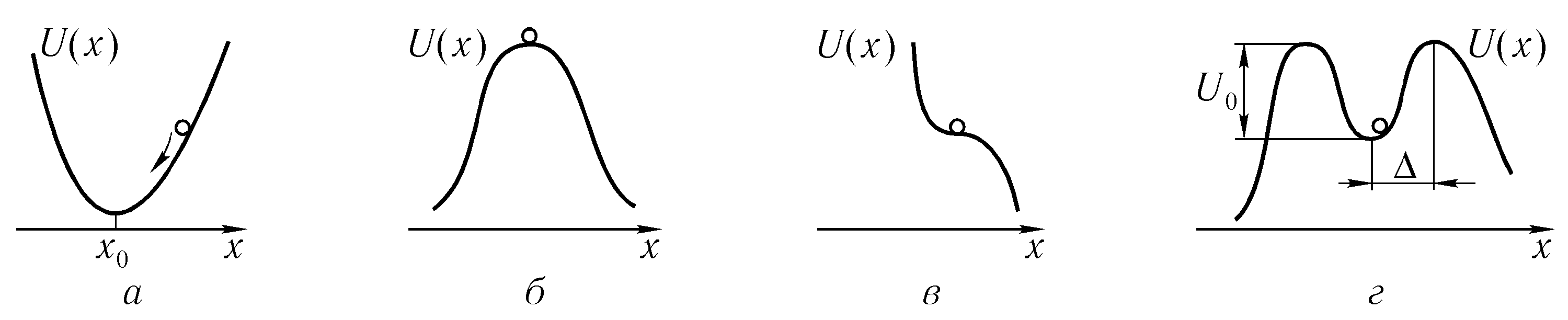
Рис. 5.11
-
Если при малом нарушении равновесия возникает отклик в виде возвращающей силы, материальная точка не может уйти из точки равновесия x0 слишком далеко (рис. 5.11 а). Само воздействие может заключаться либо в перемещении точечной массы в некоторую точку х ^ xq, либо в придании ей некоторой начальной скорости. Она, однако, останется в некоторой окрестности точки жо, если выполнено условие
![]()
что сразу следует из (5.24). Иными словами, устойчивому равновесию отвечает минимум потенциальной энергии, что в одномерной задаче эквивалентно условиям:
![]()
(5.30)
Как мы уже знаем из гл. 4, эффект возвращающей силы сводится к некоторым колебаниям вблизи положения равновесия. Если функцию dU(x)/dx можно при малых отклонениях линеаризовать, то это будут просто гармонические колебания — например, (4.18). При учете трения либо иных механизмов диссипации (вязкость, излучение акустических или электромагнитных волн, химические реакции и пр.) колебания должны быть затухающими, и частица со временем — по крайней мере, асимптотически — возвращается в положение равновесия.
2. Предположим, что функция U(x) не имеет минимума в точке равновесия (рис. 5.11 б, в). Тогда нет и устойчивости. В случае максимума U(x) —рис. 5.11 б— смещение частицы в любую сторону приводит к тому, что и ускорение оказывается направлено в сторону смещения, так что вернуться в точку xq частица не может. В ситуации, изображенной на рис. 5.11 в, частица может вернуться в жо, если либо смещение, либо начальная скорость были отрицательны — но вернется она только один раз, а далее воспроизводится
сценарий, соответствующий рис. 5.11 б. Иногда выделяют особо случай безразличного равновесия, когда F(x) = 0, т. е. U(x) = const. Но он отличается от вариантов рис. 5.11 б в лишь функционально, возвращения частицы в положение равновесия не происходит. Истинное устойчивое равновесие может быть обусловлено лишь минимумом потенциальной энергии (5.30).
В современной механике и физике различают линейную и нелинейную устойчивость. Проблема иллюстрируется рис. 5.11 г. При малых отклонениях от равновесия частица в него возвращается. Но если она выходит за границу |x- x0| > ∆ или ей сообщают кинетическую энергию, превышающую U0, частица в равновесие уже не вернется. Величины U0 и ∆ определяют порог нелинейной неустойчивости. Легко сообразить, что при достаточной амплитуде воздействия любая система оказывается нелинейно неустойчивой — хотя бы на уровне разрушения. Но это уже вовсе не обязательно
связано со случайными самопроизвольными отклонениями от равновесия.
Все примеры данного параграфа достаточно естественным образом переносятся и на неодномерный случай, и на случай макроскопических тел, а равно и сложных систем, когда, быть может, не все параметры системы ξi, определяющие устойчивость, сводятся к пространственным координатам. Правильный язык для такого «перевода» — формализм потенциальной энергии, а главная проблема — отыскание функции U(ξ1, ξ2, … )
ЗАМКНУТАЯ СИСТЕМА ТЕЛ. ЭНЕРГИЯ ВЗАИМОДЕЙСТВИЯ
И ВНУТРЕННЯЯ ЭНЕРГИЯ