

6. Оценка точности и качества скорректированной системы с учётом ограничений выходного сигнала регулятора путём моделирования.
Для определения параметров и характеристик САУ при работе на реальном объекте, где возможны различные нелинейности в системе и отдельных её объектах воспользуемся моделированием с помощью приложения SIMULINK входящего пакет программ MATLAB.
М
Внешнее возмущение.
С хема,
полученная в результате моделирования:
хема,
полученная в результате моделирования:
Гидротурбина
Ограничитель 1
Ограничитель 2
Рис. 13
Электронный
усилитель
Электродвигатель
Корректирующее
устройство
Тахогенератор
Входной сигнал.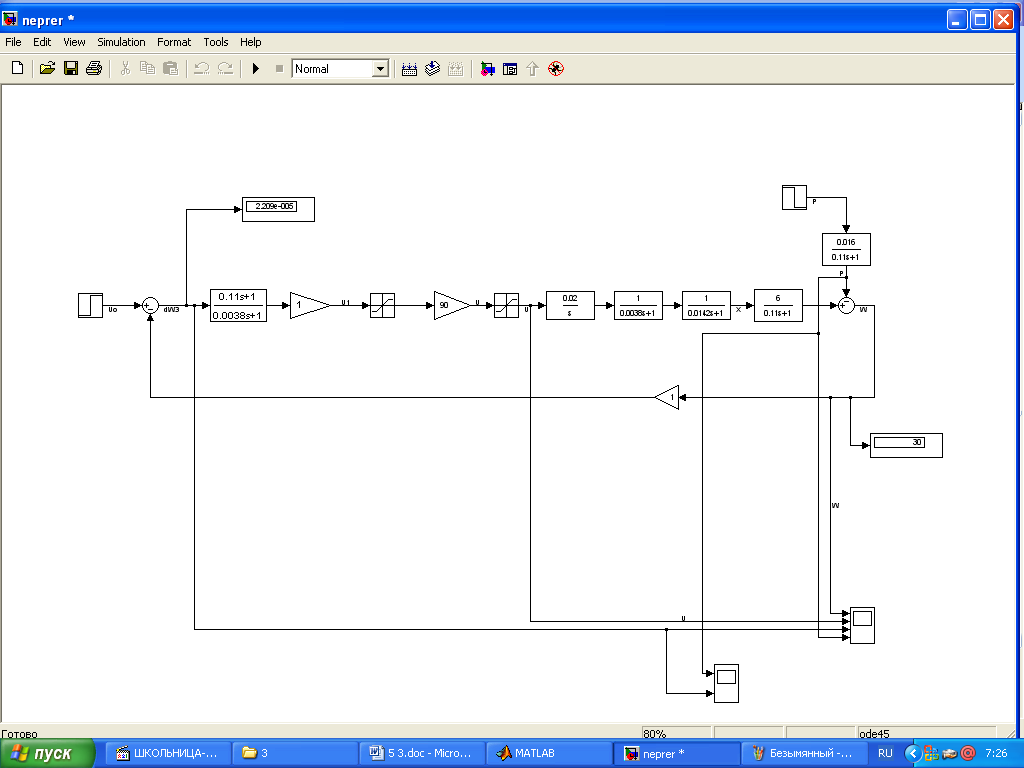



В непрерывной системе полученной в результате моделирования, для её тестирования применялись следующие исходные параметры:
1.
Ограничитель1 - ±12 В, ограничитель 2 - ±110 В, входной сигнал – 30 В, внешнее возмущение – -70 кВт. Значения, полученные в результате моделирования: ошибка – 0% перерегулирование – 0%, время переходного процесса – 2.2 с (см. Приложение 1.)
Исходя из полученных в результате моделирования параметров системы можно сделать вывод о том, что система является удовлетворительной и её характеристики соответствуют условию задания, влияние возмущения незначительно.
2.
Ограничитель1 - отсутствует, ограничитель 2 - отсутствует, входной сигнал – 30 В, внешнее возмущение – -70 кВт. Значения, полученные в результате моделирования: ошибка – 0% перерегулирование – 0%, время переходного процесса – 0.25 с (см. Приложение 2.)
Исходя, из полученных в результате моделирования параметров системы можно сделать вывод о том, что при отсутствии ограничителей система является удовлетворительной и её характеристики соответствуют условию задания, причём время переходного процесса уменьшается до расчётного, влияние возмущения незначительно.
3.
Ограничитель1 - ±12 В, ограничитель 2 - ±110 В, входной сигнал – 1 В, внешнее возмущение – -70 кВт. Значения, полученные в результате моделирования: ошибка – 0% перерегулирование – 0%, время переходного процесса – 0.4 с (см. Приложение 3.)
Исходя, из полученных в результате моделирования параметров системы можно сделать вывод о том, что при уменьшении величины входного сигнала является удовлетворительной и её характеристики соответствуют условию задания, а время переходного процесса уменьшается, влияние возмущения усиливается.
4.
Ограничитель1 - ±12 В, ограничитель 2 - ±110 В, входной сигнал – 0.1 В, внешнее возмущение – -70 кВт. Значения, полученные в результате моделирования: ошибка – 0% перерегулирование – 0%, время переходного процесса – 0.25 с (см. Приложение 4.)
Исходя, из полученных в результате моделирования параметров системы можно сделать вывод о том, что при уменьшении величины входного сигнала является удовлетворительной и её характеристики соответствуют условию задания, а время переходного процесса уменьшается, влияние возмущения увеличивается.
5.
Ограничитель1 - ±12 В, ограничитель 2 - ±110 В, входной сигнал – 30 В, внешнее возмущение – -25 кВт. Значения, полученные в результате моделирования: ошибка – 0% перерегулирование – 0%, время переходного процесса – 2.2 с (см. Приложение 5.)
Исходя, из полученных в результате моделирования параметров системы можно сделать вывод о том, что при уменьшении внешнего возмущения является удовлетворительной и её характеристики соответствуют условию задания, влияние возмущения незначительно.
6.
Ограничитель1 - ±12 В, ограничитель 2 - ±110 В, входной сигнал – 30 В, внешнее возмущение – -0.1 кВт. Значения, полученные в результате моделирования: ошибка – 0% перерегулирование – 0%, время переходного процесса – 2.2 с (см. Приложение 6.)
Исходя, из полученных в результате моделирования параметров системы можно сделать вывод о том, что при уменьшении внешнего возмущения является удовлетворительной и её характеристики соответствуют условию задания, влияние возмущения незначительно.
7.
Ограничитель1 - отсутствует, ограничитель 2 - отсутствует, входной сигнал – 1 В, внешнее возмущение – 0 кВт. Значения, полученные в результате моделирования: ошибка – 0% перерегулирование – 5%, время переходного процесса – 0.25 с (см. Приложение 7.)
Исходя, из полученных в результате моделирования параметров системы можно сделать вывод о том, что при уменьшении входного сигнала возмущения является удовлетворительной и её характеристики соответствуют условию задания, а при условии отсутствии ограничения, внешнего возмущения и равенства входного сигнала 1, система соответствует системе рассчитанной в Control System Toolbox.
Вывод: При введении в систему ограничений часть её характеристик ухудшается, возрастает ошибка, увеличивается время переходного процесса, но сводится к 0 перерегулирование, а при условии отсутствии ограничения, внешнего возмущения и равенства входного сигнала 1, система соответствует системе рассчитанной в Control System Toolbox, следовательно, спроектированная система была рассчитана правильно при заданных ограничениях и величине внешнего возмущения, тем не менее, соответствует заданным параметрам.