

3.2 Разработка алгоритма расчета двигателя постоянного тока, независимого возбуждения, и построение его механических характеристик.
Для двигателя
данного типа, нет существенного различия
между ручным расчетом и расчетом с
помощью прикладных программных средств.
Все характеристики прямолинейны, и
соответствует выражению
![]() ,
характеризующему падающую линейную
функцию.
,
характеризующему падающую линейную
функцию.
Алгоритм полностью соответствует методике ручного расчета двигателя постоянного тока, независимого возбуждения.
Построение естественной характеристики осуществляется через две точки, первая (M=0, ω=ω0), а вторая (M=MН, ω=ωН) в большинстве случаев известна, или легко рассчитывается через номинальные данные двигателя (см. выражение 2.5).
Для построения искусственных характеристик двигателя, в алгоритме используются формулы из раздела 2.2.3. Найденные величины, и координаты естественной характеристике передаются программой в функцию plot, в качестве аргументов.
Принципиальная схема алгоритма (блок схема) предоставлена на рис. 4.1.
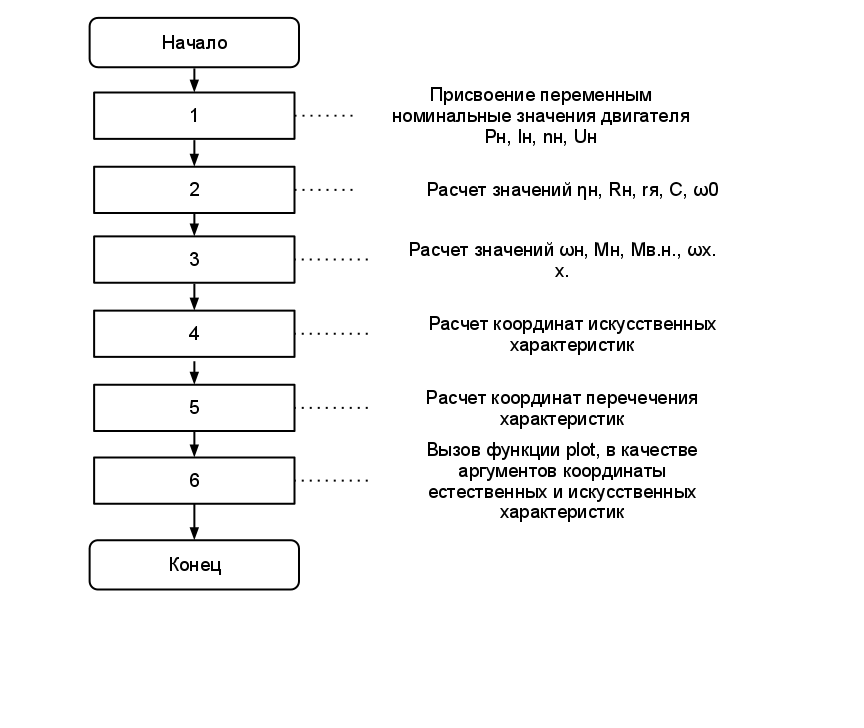
Рис. 4.1 Блок схема расчета и построения механических характеристик ДПТ НВ
3.2.1 Уравнения прямой на плоскости
Для построения тормозных и пусковых характеристик, необходимо рассчитывать точки пересечения прямых в координатной плоскости. Они необходимы для правильного построения характеристик.
Общее уравнение прямой линии на плоскости в декартовых координатах:
![]() ,
,
где A, B и C - произвольные постоянные, причем постоянные A и B не равны нулю одновременно. При C = 0 прямая проходит через начало координат.
Также уравнение можно переписать в виде:
![]() (4.1)
(4.1)
Для того чтобы найти точку пересечения двух прямых, надо представить каждую в виде уравнения 4.1 и приравнять друг другу, в результате координаты точки пересечения можно будет выразить в виде уравнений:
![]() и
и
![]()

Рис. 4.2 Уравнения прямой на плоскости
В программе функция расчета пресечений прямых называется line. Для расчета пересечения достаточно в качестве аргумента функции передать значения координат прямых, в виде line(x1,x2,y1,y2,xx1,xx2,yy1,yy2).
Где x1,x2,y1,y2 – координаты начала и конца отрезка линии 1, a xx1,xx2,yy1,yy2 – координаты начала и конца отрезка линии 2 соответственно.
Исходный код алгоритма предоставлен в приложении B.
3.3 Разработка алгоритма расчета двигателя постоянного тока, последовательного возбуждения, и построение его механических характеристик
Для построения механических характеристик для данного типа двигателя, необходимо учитывать, что все характеристики пересчитываются с применением каталожных кривых.
Наиболее точным изображением естественной характеристики двигателя является ее каталожная кривая. При наличии каталожной кривой отпадает необходимость в расчете характеристики, лишь иногда для получения на базе естественной характеристики искусственных характеристик приходится линеаризовать естественную характеристику на рабочем участке.
Коэффициенты каталожных кривых необходимо разместить в отдельный массив данных, который будет применяться для перерасчета механических характеристик.
Существенного различия между расчетом двигателя постоянного тока последовательного возбуждения (ДПТ ПВ) и двигателя постоянного тока независимого возбуждения нет (см. рис 4.3).
За основу алгоритма была взята методика ручного расчета из учебного пособия Красноярского Государственного Университета «Электропривод. Расчетно-графические работы, курсовое и дипломное проектирование».
Механические характеристики ДПТ ПВ, представляют собой логарифмическую функцию, которые невозможно построить через две точки. Расчет характеристик выполняется в цикле с шагом 1 ус. ед.
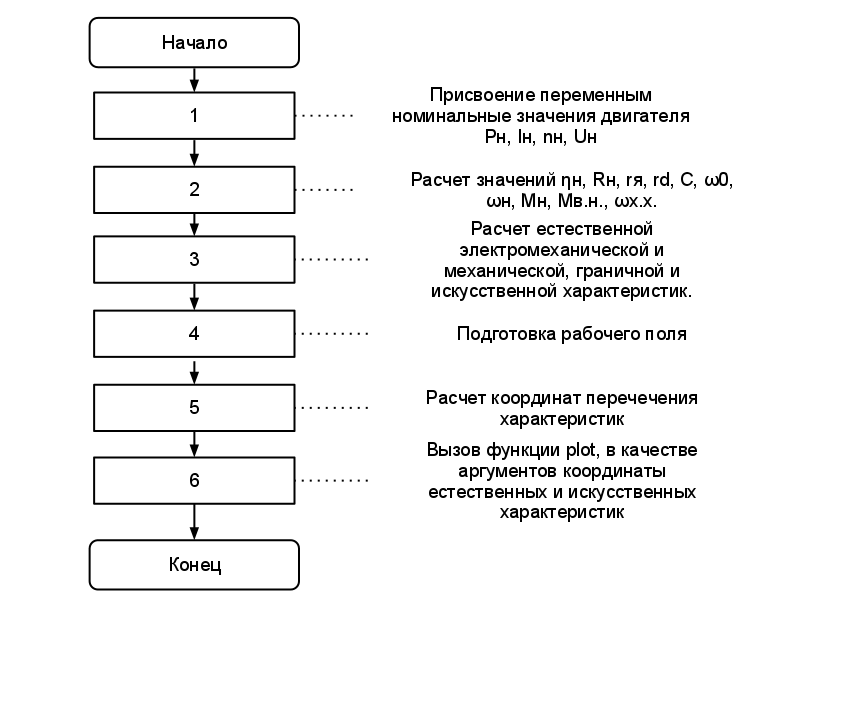
Рис. 4.3 Блок схема алгоритма расчета и построения механических характеристик ДПТ последовательного возбуждения.