

1.Структурная схема системы
Тут схема из задания к курсачу (от руки)
2. Уравнения движения самолета Уравнения бокового движения самолета:
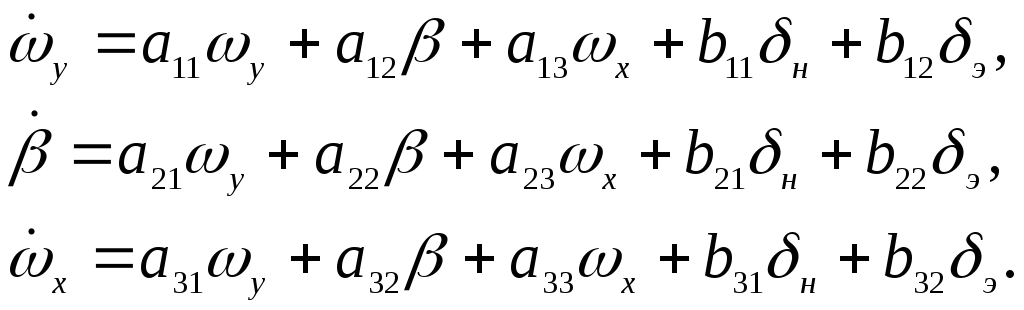
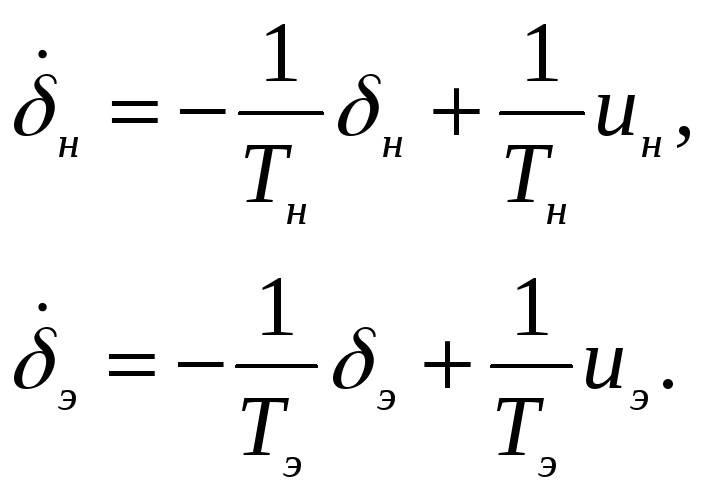
Уравнения исполнительных устройств:
![]()
Тн=0.11
Те=0.1
Т0=1/12
|
а11 |
a12 |
a13 |
a21 |
a22 |
a23 |
a31 |
a32 |
a33 |
|
-0.37 |
-2.58 |
-0.016 |
1 |
-0.13 |
0.165 |
-1.43 |
-16.25 |
-1.11 |
|
b11 |
b12 |
b21 |
b22 |
b31 |
b32 |
|
-1.3 |
0.059 |
-0.02 |
0 |
-1.48 |
-7.3 |
Задание
-
Исследование динамики ОУ
-построить переходные процессы движения самолета при ступенчатом отклонении элеронов и при ненулевых начальных условиях . β(0)≠0
-определить корни характеристического уравнения объекта;
-построить частотные характеристики объекта управления по координате ωx;
-сделать выводы о динамических свойствах объекта управления.
-
Выбрать по упрощенной модели бокового движения самолета коэффициенты обратных связей К11 и К12 в канале управления рулем направления.
- Получить z-передаточные функции самолета от δн к ωy и от δн к β. Динамикой привода пренебречь.
-Построить области устойчивости в плоскости параметров К11 и К12
-Выбрать К11 и К12 методом стандартных разностных уравнений
3. Выбрать цифровой закон управления в канале элеронов с учетом динамики привода и выбранных ранее параметров К11 и К12
-Используя выбранные К11 и К12 получить передаточную функцию дискретной системы в канале элеронов
-Построить частотные характеристики по псевдочастоте и выбрать параметры цифрового корректирующего устройства.
4.Рассчитать значение коэффициента Кх обеспечивающее требование к статике.
5.Построить переходные процессы в замкнутой системе при управлении от ручки летчика и от педали.
Требования к системе:
-К ДИНАМИЧЕСКИМ ХАРАКТЕРИСТИКАМ
1. Затухание короткопериодических колебаний по ωу и β при отработке ненулевых НУ по координате β не менее чем в 10 раз за период.
2. Собственная частота колебаний не менее 3 рад/с.
3. Время переходного процесса при управлении ωх не более 1с при монотонном характере переходного процесса. Перерегулирование менее 5%
-К СТАТИЧЕСКИМ ХАРАКТЕРИСТИКАМ
R=∆x/∆ωx=1
-Не менее чем двукратные запасы устойчивости на увеличение коэффициента передачи в каждом из контуров системы
1.Исследование динамики оу
A=[-0.37 -2.58 -0.016;1 -0.13 0.165; -1.43 -16.25 -1.11];
B=[-1.3 0.059;-0.02 0;-1.48 -7.3];
C=eye(3);
D=zeros(3,2);
s0=ss(A,B,C,D)
a =
x1 x2 x3
x1 -0.37 -2.58 -0.016
x2 1 -0.13 0.165
x3 -1.43 -16.25 -1.11
b =
u1 u2
x1 -1.3 0.059
x2 -0.02 0
x3 -1.48 -7.3
c =
x1 x2 x3
y1 1 0 0
y2 0 1 0
y3 0 0 1
d =
u1 u2
y1 0 0
y2 0 0
y3 0 0
Continuous-time model.
Определим характеристический многочлен объекта и его корни
hp=poly(A)
hp =
1.0000 1.6100 5.8415 3.0375
r=roots(hp)
r =
-0.5154 + 2.2313i
-0.5154 - 2.2313i
-0.5792
Найдем передаточные функции
w=tf(s0)
Transfer function from input 1 to output...
-1.3 s^2 - 1.537 s - 2.988
#1: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-0.02 s^2 - 1.574 s - 1.211
#2: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-1.48 s^2 + 1.444 s + 17.52
#3: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
Transfer function from input 2 to output...
0.059 s^2 + 0.19 s + 3.29
#1: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-1.145 s - 0.2773
#2: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-7.3 s^2 - 3.734 s - 20.15
#3: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
От рулей направления
wn=[w(1,1);w(2,1);w(3,1)]
Transfer function from input to output...
-1.3 s^2 - 1.537 s - 2.988
#1: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-0.02 s^2 - 1.574 s - 1.211
#2: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-1.48 s^2 + 1.444 s + 17.52
#3: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
>> От элеронов
>> we=[w(1,2);w(2,2);w(3,2)]
Transfer function from input to output...
0.059 s^2 + 0.19 s + 3.29
#1: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-1.145 s - 0.2773
#2: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
-7.3 s^2 - 3.734 s - 20.15
#3: --------------------------------
s^3 + 1.61 s^2 + 5.841 s + 3.038
Построим переходные процессы:
-при единичном ступенчатом отклонении элеронов:
step(we,20)
figure
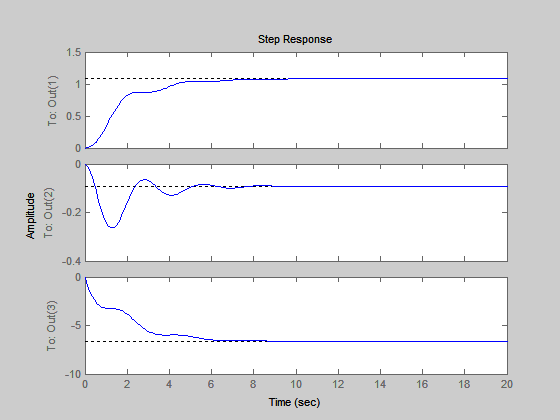
Рис. 2. Переходные процессы при единичном ступенчатом отклонении элеронов
При единичном ступенчатом отклонении руля направления
step(wn,20)
figure

Рис.3. Переходные процессы при единичном ступенчатом отклонении руля направления
-при ненулевых НУ
initial(s0,[0 1 0],10)
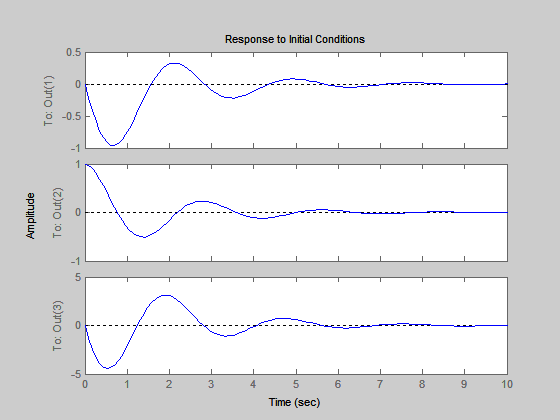
Рис.4. Переходные процессы при ненулевых НУ
Определим собственную частоту
omega=imag(r(1))
omega =
2.2313
Как видно, переходные процессы имеют колебательный характер. Собственная частота Ω0=2.2313, что не удовлетворяет заданным требованиям ( не менее 3 рад/с). Время переходных процессов по ωх равно 5 секунд, что не удовлетворяет требованиям (1с)
Поэтому для достижения заданных требований на систему требуется демпфирование системы. А также требуется корректировка системы для уменьшения времени переходного процесса. Это достигается корректировкой корней характеристического уравнения системы, за счет коэффициентов К11, К12, К23.
Построим частотную характеристику объекта относительно входа-отклонения элеронов и выхода-угловой скорости ωх.
margin([0 -7.3 -3.734 -20.15],[0 1 1.61 5.841 3.038])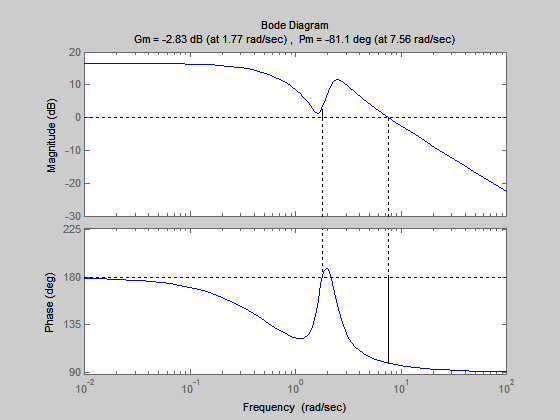
Рис.5 Частотная характеристика объекта относительно входа-отклонения элеронов и выхода-угловой скорости ωх