

2 Основні методи підвищення модуляційної характеристики частотного модулятора
2.1 Підвищення лінійності підсилювальних трактів
Як вже зазначалося, в найбільш важкій обстановці із завадами працюють пристрої приймання та обробки повідомлень, переданих як по радіоканалу (найбільш складний випадок), так і по інших типах каналів. Тому, якісні показники системи в першу чергу залежать від лінійності тракту обробки. Особливо важливим завданням є лінеаризація високочутливих малопотужних вхідних каскадів приймальних пристроїв. Існують декілька шляхів вирішення цієї проблеми (рисунок 2.1).
|
|
Методи підвищення лінійності підсилювачів |
|
|||||
|
Використання УП з підвищеною лінійністю ПХ |
Оптимізація режиму за постійним струмом |
Компенсація нелінійних спотворень |
Структурний метод |
||||
|
Оптимізація опорів джерела сигналу і навантаження |
Лінійний відємний зворотній звязок |
Нелінійна корекція і нелінійний відємний зворотній звязок |
|||||
|
|
|
||||||
|
|
Спеціальні види лінійного відємного зворотнього зв’язку |
|
|||||
|
|
|
||||||
|
Безшумний лінійний відємний зворотній звязок |
Спостерігаючий лінійний відємний зворотній звязок |
Спостерігаючий лінійний відємний зворотній зв’язок і динамічні навантаження |
Підсилювачі з плаваючим живленням |
||||
Рисунок 2.1 - Методи підвищення лінійності підсилювачів
2.2 Методи здійснення кутової модуляції
Методи здійснення кутовий модуляції можна розділити на прямі і непрямі. Прямий метод при ЧМ означає безпосередній вплив на коливальну систему автогенератора, визначальну частоту коливань. Непрямий метод полягає в перетворенні ФМ в ЧМ. Прямий метод при ФМ означає вплив на ВЧ підсилювач або помножувач частоти, тобто на електричні ланцюги, що визначають фазу високочастотних коливань. Непрямий метод полягає в перетворенні частотної модуляції в фазову. Сказане можна пояснити за допомогою чотирьох структурних схем, представлених на рисунку 2.2, на яких прийняті наступні позначення: Г - автогенератор, У - підсилювач, ЧС - частотний модулятор, ФМ - фазовий модулятор, І - інтеграція тор. Для перетворення ФМ у ЧС на вході фазового модулятора включається інтегратор (рисунок 2.2, в), а частотної - у фазову на вході ЧС - диференційований ланцюг (рисунок 2.2, г).
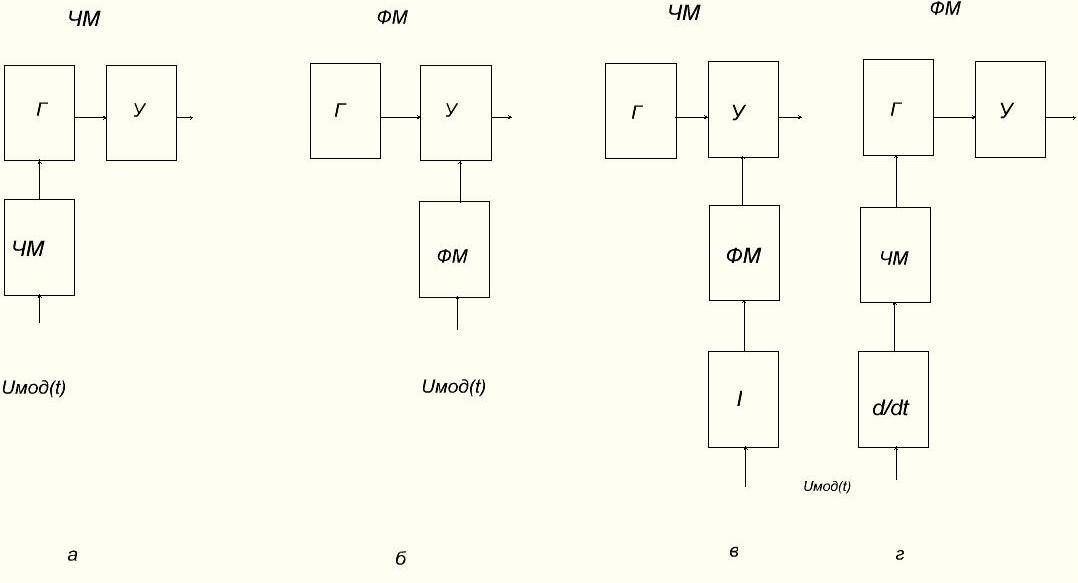
Рисунок 2.2 - Структурні схеми для отримання ЧМ і ФМ прямим і непрямим методами
Сигнал на виході інтегратора пов'язаний з вхідним сигналом співвідношенням:

При модульованому сигналі отримаємо:
 (2.2)
(2.2)
Для фази сигналу:
 (2.3)
(2.3)
Для зміни миттєвої частоти:
 (2.4)
(2.4)
Фаза змінюється з частотою модулюючого сигналу, причому мінімального значення мин відповідає максимальне значення відхилення фази дев.макс. Приймемо дев.макс=1 рад. Тоді при непрямому методі ЧС маємо: дев=хв-Невелике значення девіації частоти дев, яку можна отримати при непрямому методі ЧС, обмежує область його використання. Підвищення дев можливо шляхом збільшення дев.макс за рахунок застосування багатоконтурних коливальних ланцюгів або множення частоти сигналу в n разів, що в таке ж число раз збільшує девіацію частоти. За аналогічною методикою, досліджуючи схему непрямої модуляції ФМ із використанням диференціює ланцюга (рисунок 2.2, г), отримаємо для девіації фази: дев=дев/=const і, отже, дев.макс=дев.макс/макс.
2.3 Стабілізація частоти несучої при частотній модуляції
Оскільки при прямому методі ЧС до контуру автогенератора підключається частотний модулятор, то це призводить до зниження стабільності частоти автоколивань. Для нейтралізації цього явища використовують три способи:
- Модуляцію здійснюють в кварцовому автогенератора;
- Застосовують непрямий метод модуляції, тобто перетворення ФМ у ЧМ відповідно до схеми на рисунку 2.2, в;
- Стабілізують частоту автогенератора, до якого підключений частотний модулятор, за допомогою системи АПЧ.
Два перших способи забезпечують отримання порівняно малої девіації частоти, і тому вони застосовуються в основному при вузькосмуговій ЧС, коли девіація частоти не перевищує декількох кілогерц.
Приклад схеми кварцового автогенератора з частотним модулятором на варикапа наведено на рисунку 2.3. У ній fдев=2…3 кГц при частоті несучої 10 ... 20 МГц.
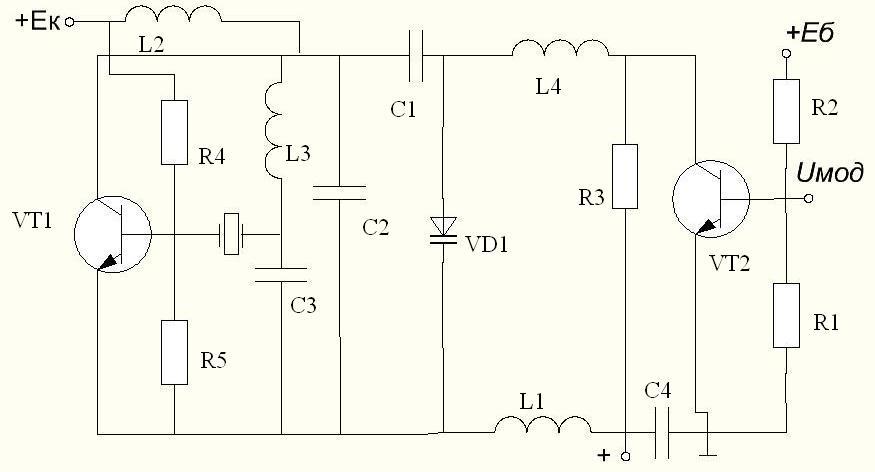
Рисунок 2.3 - Кварцевий автогенератора з частотним модулятором на варикапі
Третій метод дозволяє забезпечити малу нестабільність частоти, необхідну, в тому числі велика, значення девіації частоти. Структурна схема пристрою автоматичного підстроювання частоти автогенератора з підключеним до нього частотним модулятором наведена на рисунку 2.4. У схемі на рисунку 2.4 частотний модулятор підключений до стабілізуючого автогенератора (рисунок 2.2, а). Слід встановити таке швидкодію системи авторегулювання, щоб вона реагувала на відносно повільні зміни частоти автогенератора під дією дестабілізуючих факторів (наприклад, зміни температури) і не відгукувалася би на відносно швидкі зміни частоти під дією модулюючого сигналу.
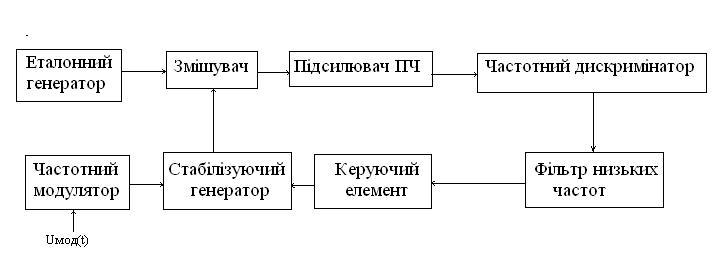
Рисунок 2.4 - Структурна схема АПЧ автогенератора з підключеним до нього частотним модулятором
Для реалізації даної умови АЧХ замкнутого кільця АПЧ повинна мати вигляд згідно з рисунком 2.5, на якому 1-2 спектр частот сигналу, що модулює.

Рис. 2.5 АЧХ замкнутого кільця АПЧ
2.4 Лінеаризація
Лінеаризація - (від лат. linearis - лінійний), один з методів наближеного представлення замкнутих нелінійних систем, при якому дослідження нелінійної системи замінюється аналізом лінійної системи, в деякому розумінні еквівалентної вихідної. Методи лінеаризації мають обмежений характер, тобто еквівалентність вихідної нелінійної системи і її лінійного наближення зберігається лише для обмежених просторових або тимчасових масштабів системи, або для певних процесів, причому, якщо система переходить з одного режиму роботи на іншій, то слід змінити і її лінеаризована модель. Застосовуючи лінеаризацію, можна з'ясувати багато якісних і особливо кількісних властивостей нелінійної системи.
Методи лінеаризації:
1) Метод логарифмування-застосовується до статечним функцій;
2) Метод зворотного перетворення-для дробових функцій;
3) Комплексний метод-для дробових і степеневих функцій.
2.5 Підвищення лінійності частотно-перетворювальних трактів
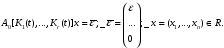
При побудові пристроїв перетворення частоти радіочастотного діапазону хвиль зазвичай використовують параметричні компоненти з нелінійними характеристиками. Тому корисний ефект супроводжується нелінійними явищами, вплив яких необхідно послабити. В останній час розвиваються, так названі, структурні методи підвищення лінійності стаціонарних радіотрактів, які використовують ціленаправлене включення нелінійних компонентів в складні структури (2.5 – 2.7).
Розглянемо
лінійне нестаціонарне коло, яке містить
один резистивний лінійно-параметричний
елемент з коефіцієнтом передачі
 ,
один вхід
,
один вхід
 і
вихід
і
вихід
 .
Система рівнянь має вигляд:
.
Система рівнянь має вигляд:
(2.5)
де
А0
– матриця системи, параметри якої є
функціями часу;
 входить
в s-компонентне
рівняння виду:
входить
в s-компонентне
рівняння виду:
 (2.6)
(2.6)
Рівняння
(2.5)
для
змінного кола має вигляд
 ,
а для вихідної змінної:
,
а для вихідної змінної:
 (2.7)
(2.7)
де К(t) – лінійно-параметричний коефіцієнт передачі кола, який є функцією від Ks(t).
Для варіації Ks(t) в (3) ∆ Ks і відповідно матриці А=А0+∆А, компонентне рівняння (2.6) має вигляд:
 (2.8)
(2.8)
Тоді розв’язок (2.5) можна представити рядом по степенях ∆Ks:
 (2.9)
(2.9)
де
 - коливання m-ї
похідної коефіцієнта передачі К
нестаціонарного тракту по коефіцієнту
передачі s-го
компонента, m=1.
По змісту ця похідна характеризує
багатовимірну функцію чутливості, яка
є на відміну від стаціонарного тракту
періодичною функцією часу.
- коливання m-ї
похідної коефіцієнта передачі К
нестаціонарного тракту по коефіцієнту
передачі s-го
компонента, m=1.
По змісту ця похідна характеризує
багатовимірну функцію чутливості, яка
є на відміну від стаціонарного тракту
періодичною функцією часу.
Врахуємо далі в s-му компонентному рівнянні нелінійні члени, які представленні степеневим рядом з залежними від часу коефіцієнтами:
 (2.10)
(2.10)
де Ks(t)=Ks1(t),
 (2.11)
(2.11)
З
порівняння компонентних рівнянь для
лінійно-параметричного (2.8) і
нелінійно-параметричного (2.10) кіл слідує,
що вони мають однакову структуру, причому
∆Ks
в (4) відповідає
 в (2.10). Тоді аналогічно (2.9) можна записати
рішення нелінійно-параметричної системи
вигляду
в (2.10). Тоді аналогічно (2.9) можна записати
рішення нелінійно-параметричної системи
вигляду
 x=(x1,…,xn)ϵ
R
наступним
чином:
x=(x1,…,xn)ϵ
R
наступним
чином:
 (2.12)
(2.12)
або

де
 - складова вихідної змінної, визначена
в передбаченні відсутності нелінійних
властивостей s-го
компонента; ∆К
– складова xi,
яка враховує ці властивості.
- складова вихідної змінної, визначена
в передбаченні відсутності нелінійних
властивостей s-го
компонента; ∆К
– складова xi,
яка враховує ці властивості.
Рішення (2.9) і (2.12) можна розповсюдити на випадок r нестабільних лінійно-параметричних чи нелінійно-параметричних компонентів. Якщо коефіцієнти передачі їх K1(t),…,Kr(t) не пов’язані кореляційним зв’язком, то аналогічно попередньому можна записати:
 (2.13)
(2.13)
де
 – умовний запис функції чутливості
коефіцієнта передачі тракту j-го
порядку до варіації параметрів i-того
компонента, визначена для системи виду:
– умовний запис функції чутливості
коефіцієнта передачі тракту j-го
порядку до варіації параметрів i-того
компонента, визначена для системи виду:
 (2.14)
(2.14)
Для
r
нелінійно-параметричних компонентів
∆Ki
в (2.13) потрібно замінити на
 ,
,
 Тоді
Тоді
 (2.15)
(2.15)
Розглянемо
зменшення впливу нелінійних ефектів в
частотно-перетворювальних структурах.
Фізичний зміст проявлення нелінійних
властивостей нелінійно-параметричних
компонентів в тракті заключається в
зміні їх параметрів в функції від
застосованих дій (корисного сигналу чи
завади). Як слідує з (2.12), (2.14), можна
впливати на лінійність тракту, керуючи
або нелінійними властивостями компонент
,відображених в функції
 ,
або багатомірними функціями чутливості
,
або багатомірними функціями чутливості
 ,
,
 Так як не лінійність перетворюючого
компоненту обов’язково виникне, то
потрібно перетворити в нуль відповідні
функції чутливості. В нестаціонарних
трактах ці функції являються функціями
часу, відповідно, нульові значення
необхідно виконати для всіх моментів
часу, тобто:
Так як не лінійність перетворюючого
компоненту обов’язково виникне, то
потрібно перетворити в нуль відповідні
функції чутливості. В нестаціонарних
трактах ці функції являються функціями
часу, відповідно, нульові значення
необхідно виконати для всіх моментів
часу, тобто:
 ,
(2.16)
,
(2.16)
або
 .
(2.17)
.
(2.17)
Однак
вимоги нульових значень функцій
чутливості, проти лежить вимогам
керування коефіцієнта передачі тракта
під дією варіації
 .
Якщо придушуючи, наприклад, доданок з
.
Якщо придушуючи, наприклад, доданок з
 ,
перетворити в нуль функцію чутливості
першого порядку
,
перетворити в нуль функцію чутливості
першого порядку
 ,
,
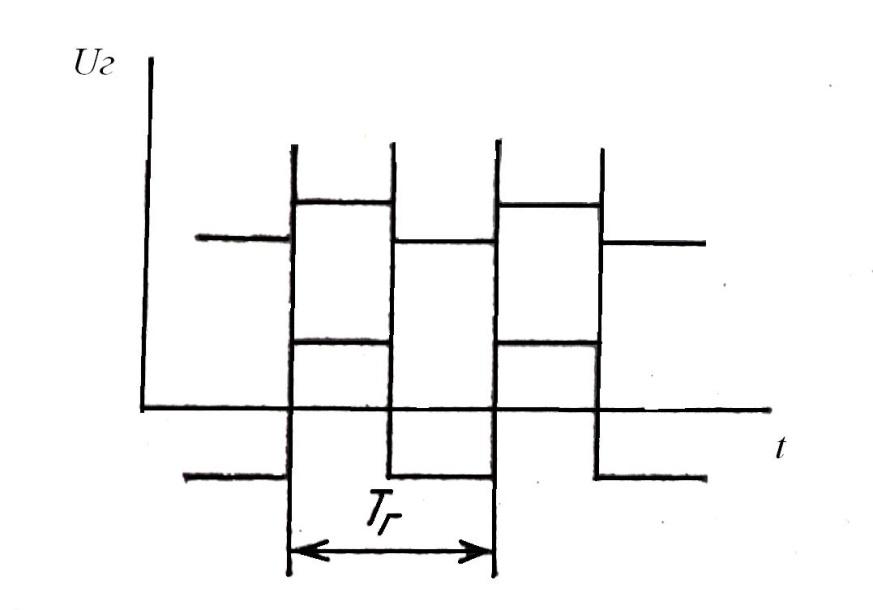
Рисунок 2.6 – Функції чутливості
Рисунок 2.7 Нульова чутливість для двох фаз
то
перетворення частоти відбуватися не
буде. Знайдене протиріччя може бути
дозволене шляхом використання спеціальних
законів керування
 .
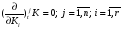
Дійсно якщо використовувати закон виду
ідеального меандра, то функція чутливості
буде мати вид імпульсних ступінчастих
залежностей (рисунок 2.6, де
.
Дійсно якщо використовувати закон виду
ідеального меандра, то функція чутливості
буде мати вид імпульсних ступінчастих
залежностей (рисунок 2.6, де
 - коливання гетеродина.) Якщо додатково
задати, щоб значення відповідних функцій
чутливості перетворювались в нуль на
ділянках плоскої частини керуючого
імпульсу гетеродина з періодом
- коливання гетеродина.) Якщо додатково
задати, щоб значення відповідних функцій
чутливості перетворювались в нуль на
ділянках плоскої частини керуючого
імпульсу гетеродина з періодом
 ,
то додаток цього члена ряду в нелінійний
ефект буде прямувати до нуля при збережені
властивостей керування перетворювача.
,
то додаток цього члена ряду в нелінійний
ефект буде прямувати до нуля при збережені
властивостей керування перетворювача.
Синтез
високо лінійних частотно – перетворюючих
структур можна здійснити на основі
підходів, розвинених у стосовно до
стаціонарних трактів. На відміну від
останніх для перетворювачів потрібно
дотримуватись виконання умови нульової
чутливості для двох фаз значень
коефіцієнтів передачі
 (рисунок
2.7). На рисунку 2.8 показано синтезований
граф структури перетворювача, в якого
забезпечується нульова чутливість
першого порядку до елементів
(рисунок
2.7). На рисунку 2.8 показано синтезований
граф структури перетворювача, в якого
забезпечується нульова чутливість
першого порядку до елементів
 і
і
 .
.
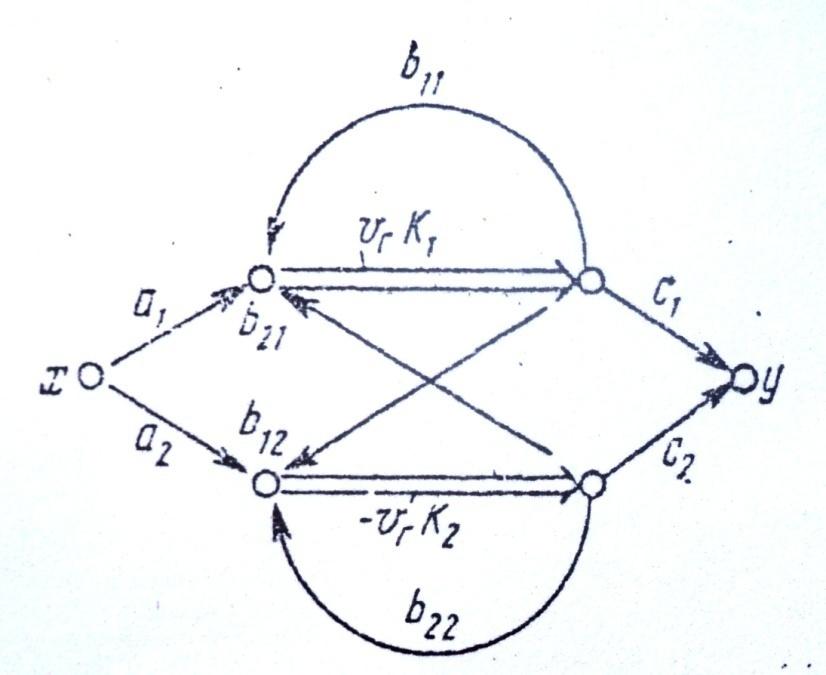
Рисунок
2.8 – Синтезований граф структури
перетворювача, в якого забезпечується
нульова чутливість першого порядку до
елементів
 і
і
 .
.
Умова нульової чутливості має вигляд:
 (2.18)
(2.18)
де
 ,
передача графа
,
передача графа
 відповідно парам
відповідно парам
 і
і
 :
:
 і
і
 і
і
 і
і
 .
.
Підвищений порядок нульової чутливості по відношенню до перетворюючих елементів, можна аналогічно стаціонарним трактам ціле направлено підвищити лінійність перетворювача.
Детальний
аналіз структурних умов для структур,
подібних як зображено на рисунку 2.8 ,
показує, що задовольняє умови нульової
чутливості до n-го
порядку забезпечує перший нелінійний
член
 порядку, тобто для n=1,
ряд починається з четвертого лінійного
члена, для n=2
– з восьмого, для n=3
з шістнадцятого і т.д. з цього слідує,
що структурні методи на основі теорії
чутливості – ефективний спосіб підвищення
лінійності.
порядку, тобто для n=1,
ряд починається з четвертого лінійного
члена, для n=2
– з восьмого, для n=3
з шістнадцятого і т.д. з цього слідує,
що структурні методи на основі теорії
чутливості – ефективний спосіб підвищення
лінійності.
2.6 Підвищення лінійності модуляційної характеристики за допомогою використання транзисторного індуктивного елементу (ТІЕ)
Застосування
транзисторного індуктивного елементу
(ТІЕ) з метою оцінювання можливості
застосування їх для стабілізації
середньої ЧМ і лінеаризації МХ. Показано,
що при вмиканні індуктивності між базою
і колектором транзистора, ввімкненого
по схемі зі спільним колектором , її
трансформування на вхід можна подати
у вигляді добутку
 на
на

 ,
(2.19)
(1)
,
(2.19)
(1)
де:
 -
комплексна
провідність;
-
комплексна
провідність;
 -
комплексний коефіцієнт трансформації
провідності.
-
комплексний коефіцієнт трансформації
провідності.
Із
(1) видно, що така індуктивність
трансформується на вхід у вигляді
від’ємної активної складової -
 та
індуктивної
та
індуктивної
 провідностей. Це говорить про можливість
збільшення добротності індуктивності,
що важливо для реалізації високодобротних
селективних кіл. З використанням
еквівалентної схеми НВЧ транзистора
та з урахуванням ефекту затримки носіїв
заряду в базі транзистора проведено
дослідження залежності активної і
реактивної складових певного опору від
частоти та режиму роботи. З цією метою
використовувались вирази, які описують
залежність параметрів фізичної
еквівалентної схеми від частоти, режиму
роботи та температури. Проведені
дослідження показали, що реактивний
вхідний опір має індуктивний характер,
при цьому з ростом частоти до
провідностей. Це говорить про можливість
збільшення добротності індуктивності,
що важливо для реалізації високодобротних
селективних кіл. З використанням
еквівалентної схеми НВЧ транзистора
та з урахуванням ефекту затримки носіїв
заряду в базі транзистора проведено
дослідження залежності активної і
реактивної складових певного опору від
частоти та режиму роботи. З цією метою
використовувались вирази, які описують
залежність параметрів фізичної
еквівалентної схеми від частоти, режиму
роботи та температури. Проведені
дослідження показали, що реактивний
вхідний опір має індуктивний характер,
при цьому з ростом частоти до
 він зростає, а вище
він зростає, а вище
 падає, активна складова з ростом частоти
повільно зростає і тому фазо-частотна
характеристика ТІЕ до
падає, активна складова з ростом частоти
повільно зростає і тому фазо-частотна
характеристика ТІЕ до
 буде зростати, а вище
буде зростати, а вище
 буде падати. Наближені розрахунки
показали, що добротність досягає
максимального значення приблизно на
частоті
буде падати. Наближені розрахунки
показали, що добротність досягає
максимального значення приблизно на
частоті
 ,
на частотах від
,
на частотах від
 до
до
 добротність повільно зменшується. Вище
добротність повільно зменшується. Вище
 добротність зменшується пропорційно
квадрату зменшення відношення
добротність зменшується пропорційно
квадрату зменшення відношення
 ,
а на частотах нижче
,
а на частотах нижче
 зменшується пропорційно відношення
зменшується пропорційно відношення
 .
.
Дослідження залежності еквівалентного вхідного опору ТІЕ від струму емітера і напруги на колекторі для партії виробів і різних типів транзисторів показало, що має місце закономірність, яка полягає в тому, що реактивний опір з ростом струму емітера зростає, причому при малих струмах він має ємкісний характер, а вище величини порядку 1 мА, він має індуктивний характер, з ростом струму зростає і ця залежність має випуклий характер. Активна складова певного опору ТІЕ при малих струмах з початку зростає, а потім повільно зменшується. З ростом напруги на колекторі реактивна складова опору з початку зростає, досягає деякого максимального зниження, а при подальшому зростанні напруги в значних межах реактивний опір практично не змінюється. Активна складова вхідного опору з початку зростає, при зміні напруги, а потім повільно зменшується. Залежності еквівалентної індуктивності та добротності від струму емітера і напруги на колекторі приведені на рисунку 2.9
Для підвищення добротності еквівалентної індуктивності, як показано вище, необхідно вмикати індуктивність між базою і колектором транзистора або другий транзистор. Залежності повного опору, індуктивності та добротності від частоти для складеного транзистора приведені на рисунку 2.10
Оскільки в діапазоні високих і надвисоких частот доцільніше використовувати не параметри фізичної еквівалентної схеми, а параметри розсіювання [S], то в роботі отримано вираз для розрахунку повного опору ТІЕ для випадку, коли використовуються S-параметри транзистора як неузгодженого чотириполюсника
 ,
(2.20)
,
(2.20)
де
 – коефіцієнт відбиття від навантаження.
Застосовуючи
(2.20),
можна розрахувати повний опір ТІЕ,
еквівалентну індуктивність і добротність.
– коефіцієнт відбиття від навантаження.
Застосовуючи
(2.20),
можна розрахувати повний опір ТІЕ,
еквівалентну індуктивність і добротність.
Для
оцінки впливу дестабілізуючих факторів
та виробничо-технолгічних відхилень
параметрів компонентів схем проведено
дослідження статистичних параметрів
ТІЕ. З цією метою визначені ФГЙ вихідних
параметрів ТІЕ. При цьому допускалось,
що відомі закони розподілу вхідних
параметрів і рівняння зв’язку вихідних
параметрів з вхідними. Для
визначення ФГЙ використовувався метод
моментів. При цьому невідому ФГЙ
вихідних параметрів представимо у
вигляді ряду по деяких поліномах
 ,
які на дільниці [
,
які на дільниці [ ]
відмінні від нуля
]
відмінні від нуля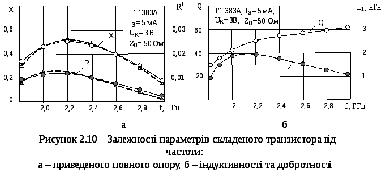
 (2.21)
(2.21)
Коефіцієнт Сn ряду (3) будемо розраховувати із умови рівності моментів для вихідних параметрів ТІЕ та розрахованих із ряду (2.21). Використовуючи це, отримано систему алгебраїчних рівнянь відносно невідомих коефіцієнтів
 k=0,1,2,…4
,
(2.22)
k=0,1,2,…4
,
(2.22)
де
 – максимальні та мінімальні значення
вихідних параметрів ТІЕ.
– максимальні та мінімальні значення
вихідних параметрів ТІЕ.
З використанням цього методу отримано двомірну ФГЙ вихідних параметрів і показано, що вона відповідає нормальному закону. Вираз для ФГЙ вихідних параметрів має вигляд:

З метою підвищення режимної та температурної стабільності середньої частоти запропоновано для реалізації індуктивності коливального контуру використовувати ТІЕ. Оскільки з ростом напруги між емітером і базою транзистора зростає струм емітера, то це приводить до росту еквівалентної індуктивності. З ростом температури також зростає струм емітера, а відповідно і еквівалентна індуктивність. В той же час з ростом напруги ємність варикапів навпаки падає і з ростом температури також зменшується, оскільки зростає контактна різниця потенціалів. Проведені дослідження показали, що при деяких значеннях напруги на колекторі, яку названо напругою насичення, еквівалентна індуктивність ТІЕ з ростом напруги практично не змінюється , тому пропонується ТІЕ ввімкнути таким чином в коливальний контур, щоб напруга модулюючого сигналу подавалась на колектор транзистора, а напруга живлення, яка визначає робочу точку варікапа, прикладалась між емітером і базою транзистора, що дає можливість компенсувати нестабільність середньої частоти, обумовлену нестабільністю напруги джерела живлення та зміною температури. Отримано вираз для розрахунку частоти генерації
 ,
(2.24)
,
(2.24)
 ,
(2.25)
,
(2.25)
де:
Св
–
ємність
варікапа, L
–
індуктивність ТІЕ,
 –
ємність зв’язку,
–
ємність зв’язку,
 – ємність між колектором і базою
транзистора.
– ємність між колектором і базою
транзистора.
Для розрахунку нестабільності частоти враховувались залежність параметрів фізичної еквівалентної схеми транзистора та варікапа від дестабілізуючих факторів. При цьому використовувався метод, який ґрунтується на представленні відхилень параметрів компонентів схеми від номіналів у вигляді генеральної суміші різних партій виробів, в межах кожної із яких залежність параметра, що досліджується, від дестабілізуючого фактору є лінійною. При цьому використовувався метод кусково-лінійної апроксимації.
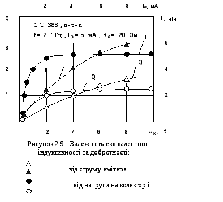
У відповідності з приведеною методикою проводилися розрахунки нестабільності частоти для випадку, коли в ЧМ як керуючий елемент використовувався варикап і індуктивність, величина якої не залежала від модульованого сигналу. Графік залежності відносної нестабільності частоти від нестабільності напруги джерела живлення приведено на рисунку 2.11 (лінія1).
На цьому ж рисунку приведена така ж залежність для випадку, коли в схему вмикається ТІЕ, на колектор якого подається модулюючий сигнал, а емітер підключається до від’ємного полюсу джерела живлення (лінія 2). При цьому збільшення напруги джерела живлення приводить до збільшення еквівалентної індуктивності ТІЕ. Порівняння цих графіків показує, що введення ТІЕ як індуктивності коливального контуру приводить до зменшення відносної нестабільності приблизно в 1,5 рази.

Рисунок 2.11 - Залежність відносної нестабільності частоти від нестабільності напруги джерела живлення.
На рис.4 приведена залежність нестабільності середньої частоти ЧМ
На рисунку 2.12 приведена залежність нестабільності середньої частоти ЧМвід температури для тих же умов. Як видно із графіків, введення ТІЕ дозволяє знизити температурну нестабільність приблизно в 1,6 рази .
Для підвищення лінійності МХ ЧМ пропонується використовувати залежність індуктивності ТІЕ від напруги між емітером і базою транзистора. Оскільки ця залежність є випуклою, а вольт-фарадна характеристика вгнутою, то це дає можливість компенсувати ці нелінійності. Крім того, оскільки з ростом напруги ємність варікапа зменшується, а індуктивність ТІЕ зростає, то це дає можливість додатково збільшити девіацію частоти. Так, якщо використовувати транзистор відповідної полярності, то при подачі позитивної напівхвилі модульованого сигналу зменшується зворотна напруга на варікапі, внаслідок чого частота коливань, що генеруються, зменшується. Якщо такий сигнал поступає в коло емітер-база транзистора n-р-n провідності, то еквівалентна індуктивність зменшується, а частота коливань, що генерується, зростає і навпаки, при подачі від’ємної напівхвилі модульованого сигналу збільшується зворотна напруга на варікапі, що приводить до зменшення ємності варікапа та збільшення частоти коливань, що генеруються. При такій полярності модульованого сигналу напруга між емітером і базою зменшується, що приводить до збільшення еквівалентної індуктивності й зменшенню частоти генерованих коливань. В результаті цього девіація частоти зростає.
Враховуючи,
що вольт-фарадна характеристика варікапа
є ввігнутою, залежність еквівалентної
індуктивності від
 є випуклою, то це дозволяє підвищити
лінійність МХ. Крім цього, лінійність
МХ підвищується за рахунок частотної
залежності еквівалентної індуктивності,
яка на частотах вище
є випуклою, то це дозволяє підвищити
лінійність МХ. Крім цього, лінійність
МХ підвищується за рахунок частотної
залежності еквівалентної індуктивності,
яка на частотах вище
 має випуклий характер і з ростом частоти
зменшується.
має випуклий характер і з ростом частоти
зменшується.
Cтруктурна схема частотного модулятора, який реалізує запропонований метод лінеаризації МХ, приведена на рисунку 2.13.
Для спрощення розрахунку МХ запропоновано вирази для апроксимації залежності еквівалентної індуктивності від напруги керування та частоти , які можна записати у такому вигляді
 ,
,
 , (2.26)
, (2.26)
де
 – індуктивність ТІЕ при напрузі , коли
статистичний коефіцієнт
– індуктивність ТІЕ при напрузі , коли
статистичний коефіцієнт
 досягає максимального значення або
емітерний перехід повністю відкритий;
b
– коефіцієнт,
досягає максимального значення або
емітерний перехід повністю відкритий;
b
– коефіцієнт,
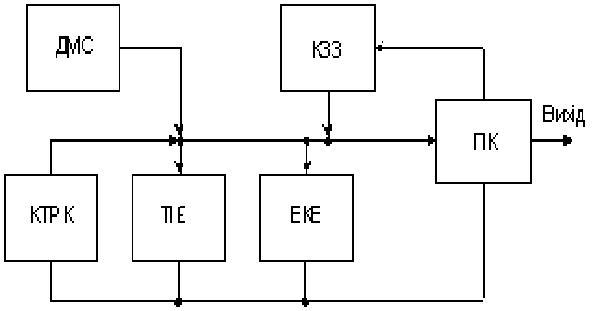
Рисунок 2.13 - Структурна схема частотного модулятора, де ДМС – джерело модуляційного сигналу; КТРК – коло температурної та режимної компенсації; КЗЗ – коло зворотного зв‘язку; ЕКЕ – електрично-керований елемент; ПК - підсилювальний каскад.
величина
якого залежить від напруги на колекторі
і в діапазоні зміни модулюючого сигналу
при
 дорівнює приблизно 1;
дорівнює приблизно 1;
 –
контактна різниця потенціалів;
–
контактна різниця потенціалів;
 – коефіцієнт, який враховує вплив
напруги між емітером і базою транзистора,
а також напругу на колекторі.
– коефіцієнт, який враховує вплив
напруги між емітером і базою транзистора,
а також напругу на колекторі.
Порівняння розрахунків виконаних за виразами (2.26) з експериментом показує, що розбіжність не перевищує 2%. З використанням цих виразів і рівняння для вольт-фарадної характеристики варікапа отримано вираз для МХ ЧМ

де:
 ,
,
 –
напруга, прикладена між базою і емітером
транзистора,
–
напруга, прикладена між базою і емітером
транзистора,
 – напруга на варикапі,
– напруга на варикапі,
 – індуктивність ТІЕ і ємність варікапа
при початковій напрузі.
– індуктивність ТІЕ і ємність варікапа
при початковій напрузі.
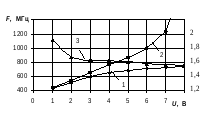
Рис 2.14 - Залежність частоти ЧМ
від напруги керування на варикапі і ТІЕ
Потрібно відзначити, що в виразі (2.27) необхідно врахувати залежність індуктивності від частоти, яка визначається у відповідності з виразом (2.26).
За виразом проведено розрахунок модуляційної характеристики ЧМ для випадку, коли індуктивність не залежить від напруги, прикладеної до варікапа рисунок 2.14 (лінія 1), і, коли модулююча напруга подається на варікап і ТІЕ в противофазі ( лінія 2).
Аналіз результатів розрахунків показує, що коефіцієнт нелінійності МХ, який визначається, як відношення відхилення допустимої нелінійності МХ до повної зміни частоти, для першого випадку дорівнює 20%, а для другого – 2,4%. При цьому індекс модуляції в першому випадку рівняється приблизно 0,44, а в другому – біля 0,84.
У випадку використання синфазного вмикання варікапа і ТІЕ (лінія 3) нелінійність МХ при малій напрузі на керуючих елементах суттєво зростає, а індекс модуляції зменшується і складає біля 0,13, а коефіцієнт не лінійності МХ становить 6 %.
З використанням (2.27) отримано вирази для розрахунку коефіцієнтів нелінійних спотворень по 2-й і 3-й гармоніках

та проведено дослідження їх залежності від амплітуди модулюючого сигналу.
Розглянута можливість використання режиму відсікання вихідного струму для розширення динамічного діапазону та покращення енергетичних показників ЧМ. Таким чином, урахування залежності еквівалентної ТІЕ від миттєвих значень модулюючого сигналу дає можливість підвищити стабільність середньої частоти в 1,5 рази та лінійність модуляційної характеристики на 3 % при значно більшому індексі модуляції.