3.9 Функция wrs, Переходная
>>ltiview
4.0.Функция WRS, Переходная
4.1.Функция WRS, Impulse
4.2.Функция WRS, Bode
4.3.Функция WRS, Bode
4.4.Функция WRS, Nyquist
4.5.Функция WRS, Nichols

4.6.Функция
WRS, Singular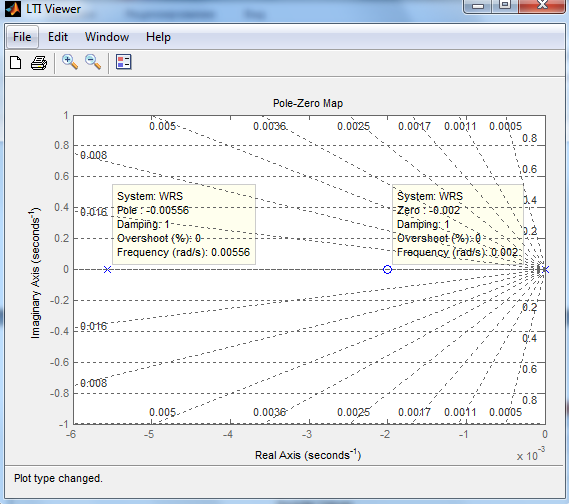
4.7.Функция WRS, Pole-Zero
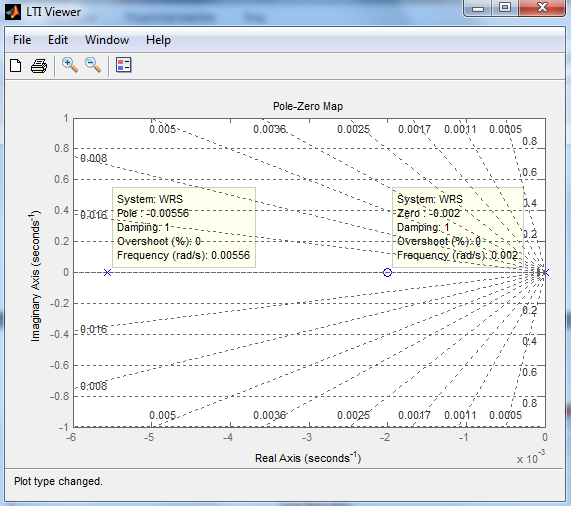
4.8.Функция WRS, Pole-Zero
Замкнем систему отрицательной обратной связью с помощью функции Feedback и определим переходный процесс замкнутой системы
>> WOZ= feedback (WRS, [1])
Transfer function:
249.5 s + 0.5
-------------------------
19440 s^2 + 357.5 s + 0.5
>> ltiview
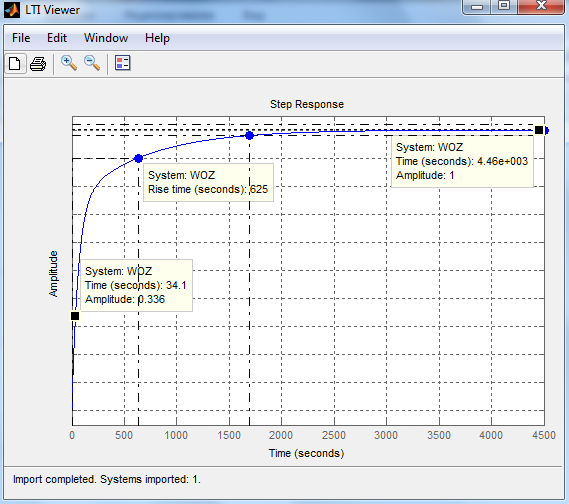
4.9.Функция WOS, Переходная
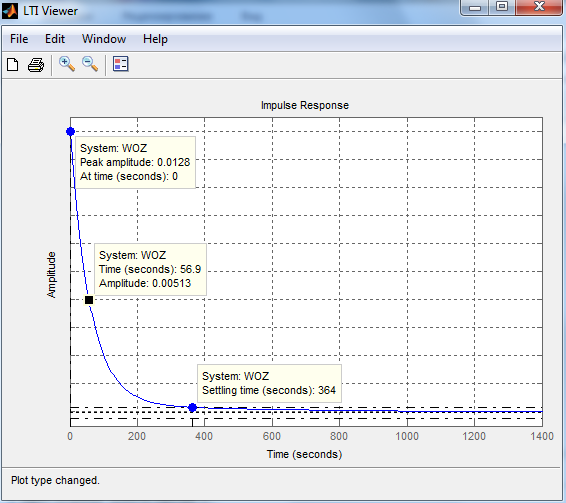
5.0.Функция WOZ, Impulse
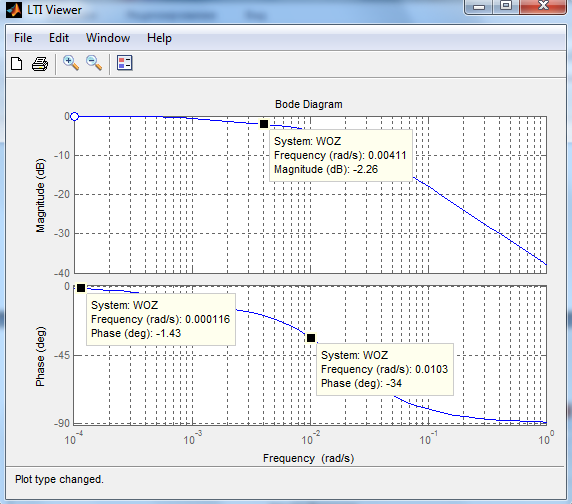
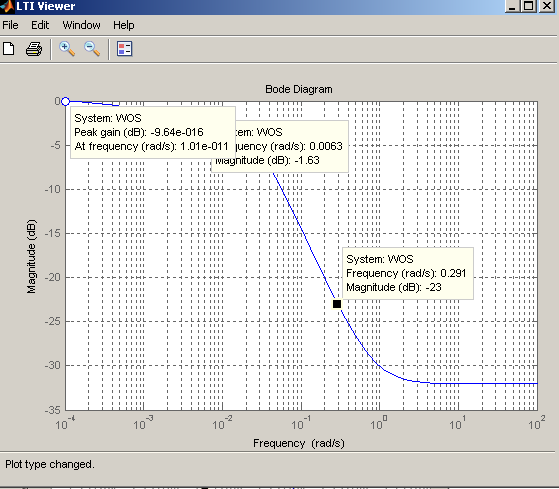
5.1.Функция WOZ, Bode
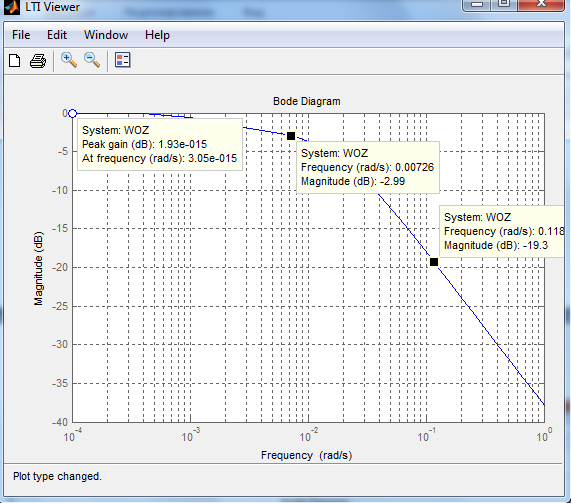
5.2.Функция WOS, Bode

5.3.Функция WOS, Nyquist
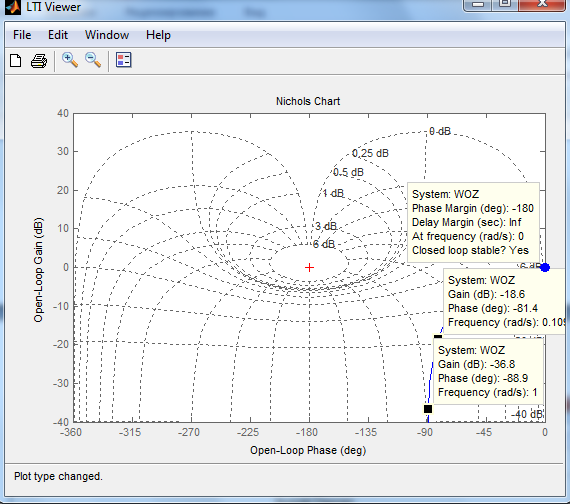
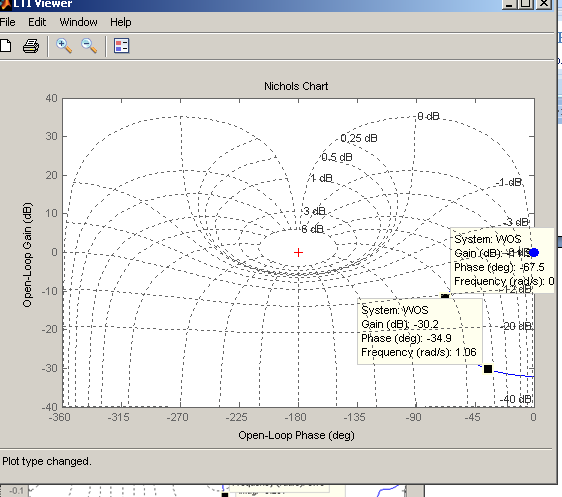
5.4.Функция WOS, Nichols
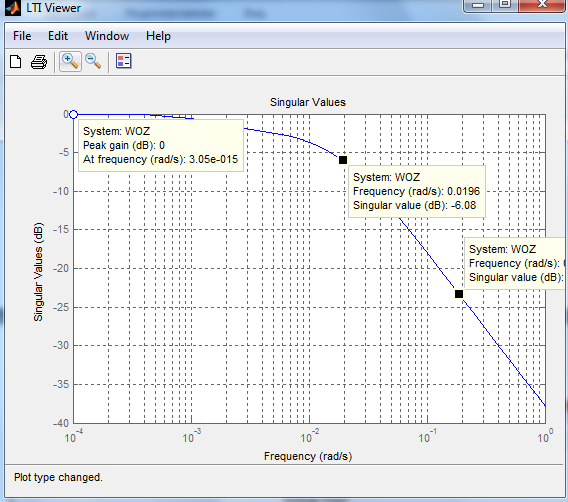
5.5.Функция WOS, Singular
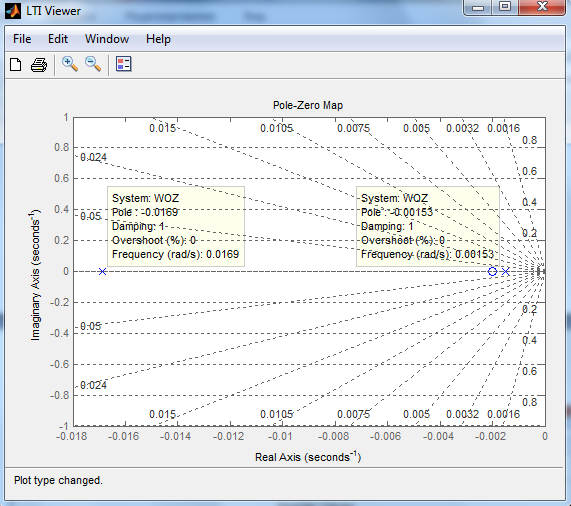
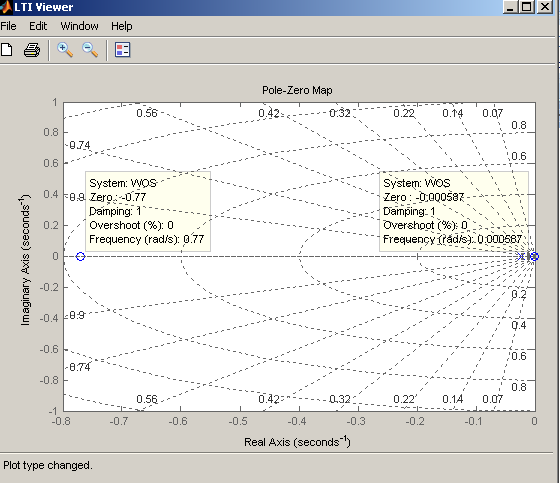
5.6.Функция WOS, Pole-Zero
5.7.Функция WOS, Pole-Zero
Рассмотрим замкнутую систему с учетом запаздывания
Составим передаточную функцию звена чистого запаздывания
>> n5= [1 -0.25 0.5]; m5= [1 0.25 0.5]; WZ= tf (n5, m5)
Transfer function:
S ^2 - 0.25 s + 0.5
------------------
S ^2 + 0.25 s + 0.5
>> GOSZ=WOZ*WZ
Transfer function:
249.5 s^3 - 61.87 s^2 + 124.6 s + 0.25
------------------------------------------------
19440 s^4 + 5217 s^3 + 9810 s^2 + 178.9 s + 0.25
>> ltiview
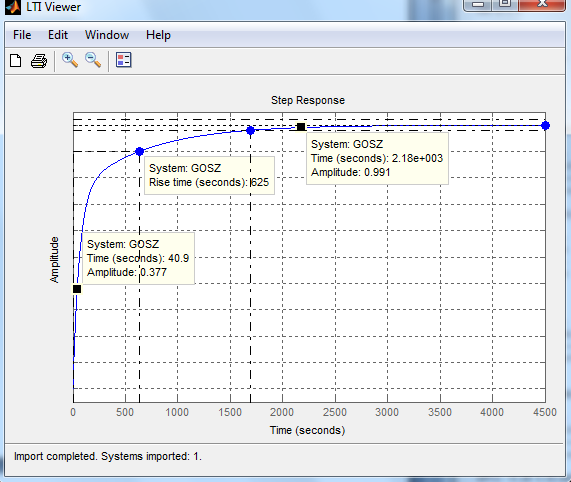
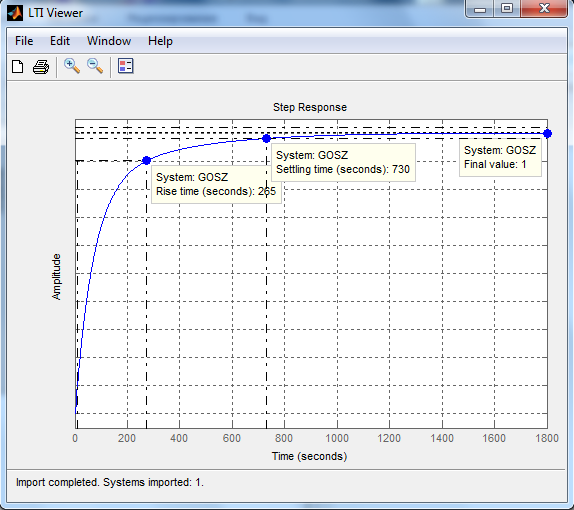
5.8.Функция GOSZ, Переходная
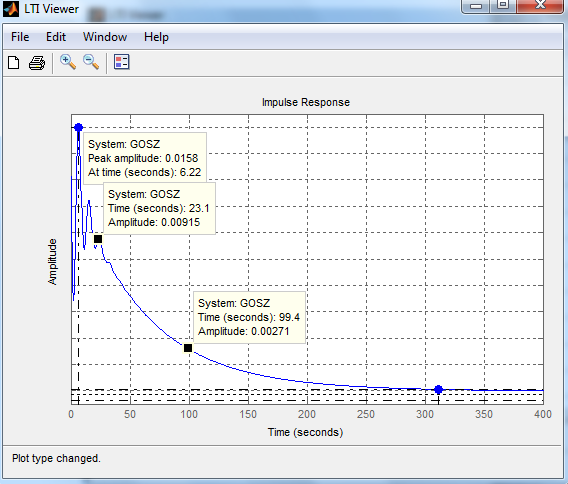
5.9.Функция GOSZ, Impulse
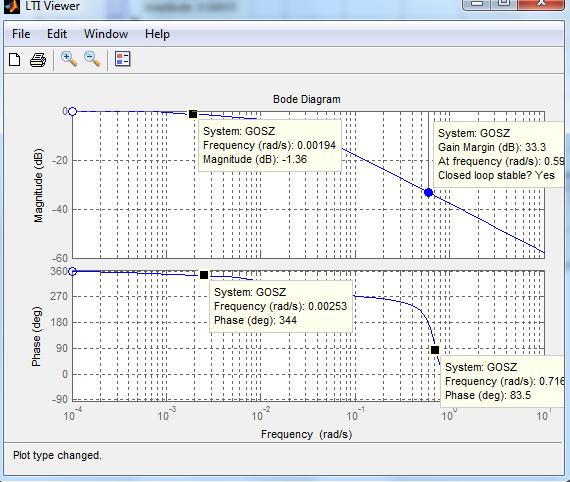
6.0.Функция GOSZ, Bode
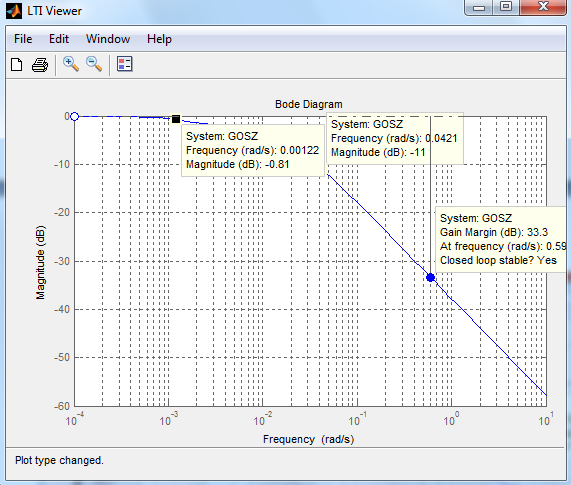
6.1.Функция GOSZ, Bode
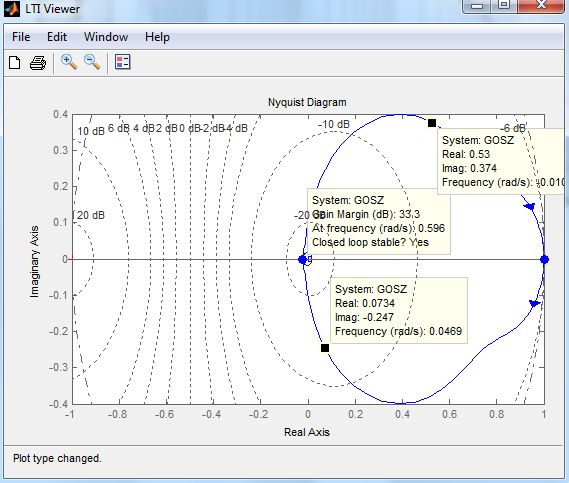
6.2.Функция GOSZ, Nyquist
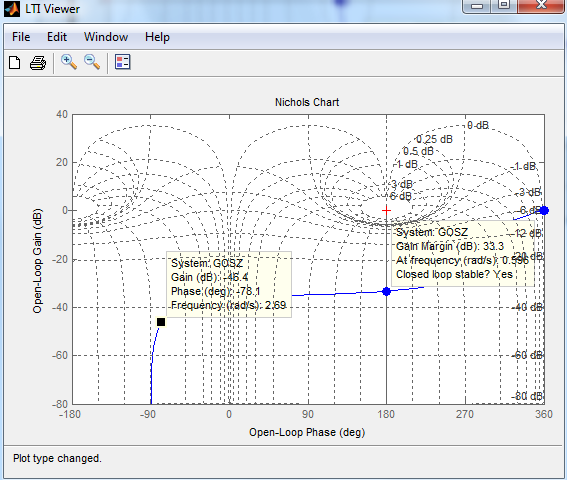
6.3.Функция GOSZ, Nichols
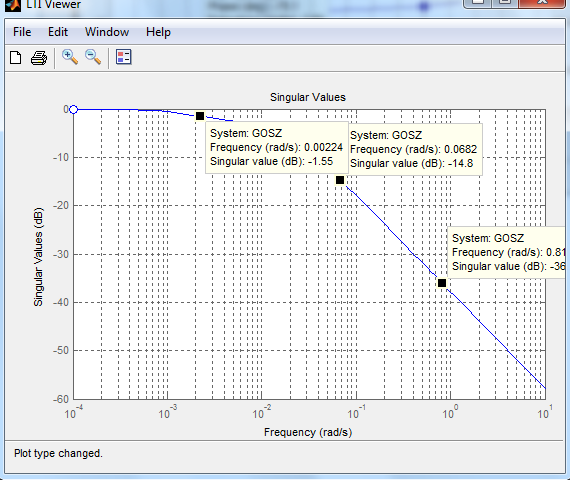
6.4.Функция GOSZ, Singular

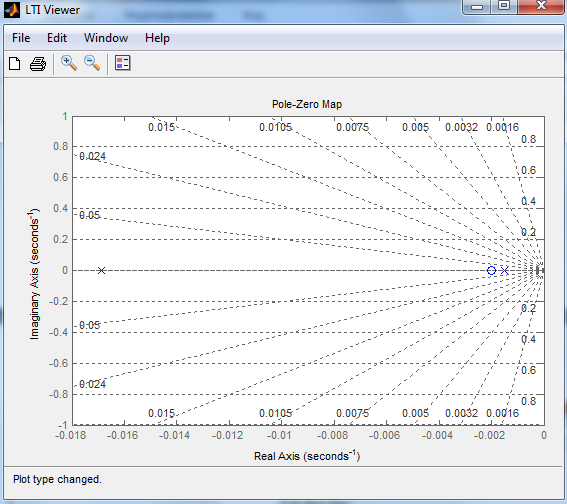
6.5.Функция GOSZ, Pole-Zero
6.6.Функция GOSZ, Pole-Zero
Передаточная функция ПИД-регулятора.
Формируем передаточную функцию регулятора
>> n1=[4.62];m1=[1];Kr=tf(n1,m1)
Transfer function:
4.62
>> n2= [1]; m2= [57.6, 0]; Ti=tf (n2, m2)
Transfer function:
1
------
57.6 s
>> n3= [9.6, 0]; m3= [1]; Td= t f(n3, m3)
Transfer function:
9.6 s
Вид передаточной функции регулятора
>> Wr=Kr+Ti+Td
Transfer function:
553 s^2 + 266.1 s + 1
---------------------
57.6 s
Формируем передаточную функцию объекта управления
>> n4= [0.5]; m4= [180, 1]; Woy= tf (n4, m4)
Transfer function:
0.5
---------
180 s + 1
Найдем переходный процесс для разомкнутой системы функцией (WRS)
>> WRS=Wr*Woy
Transfer function:
276.5 s^2 + 133.1 s + 0.5
-------------------------
10368 s^2 + 57.6 s
>>ltiview
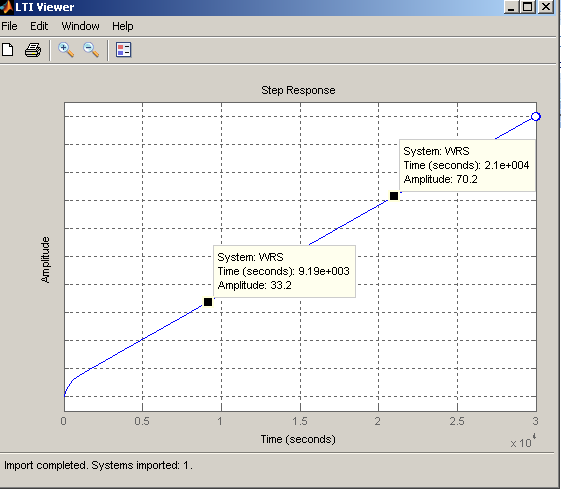
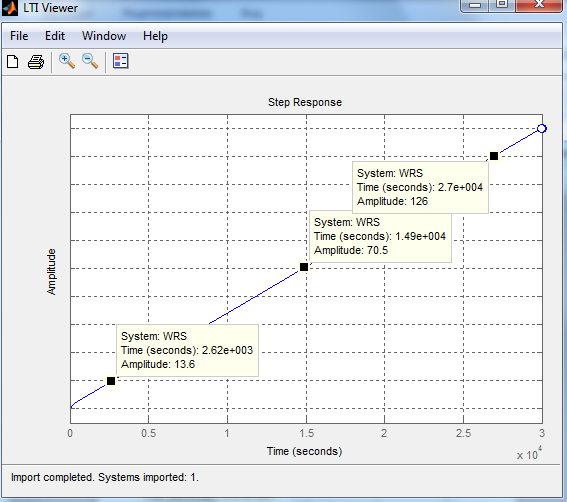
6.7.Функция wrs, Переходная

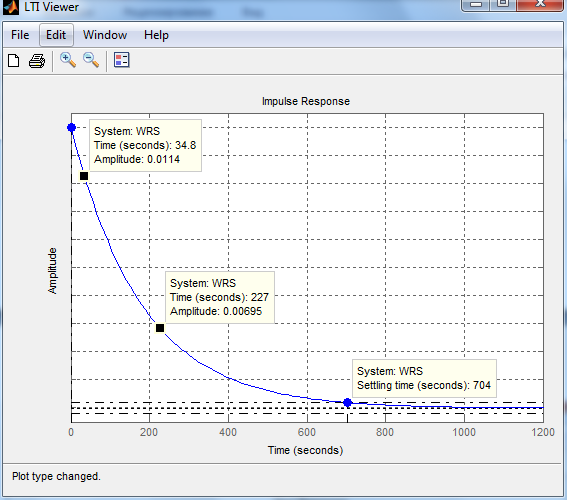
6.7.Функция
WRS, Impulse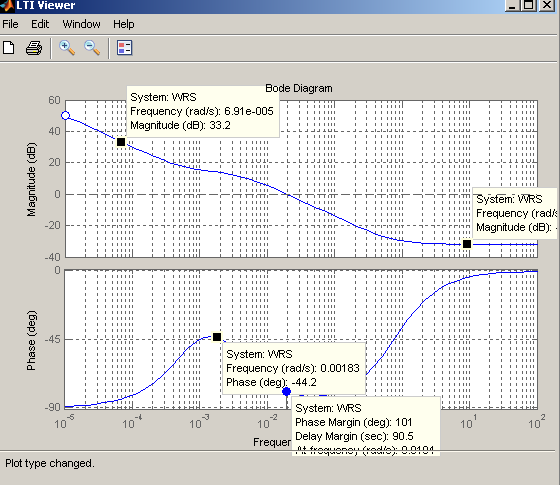
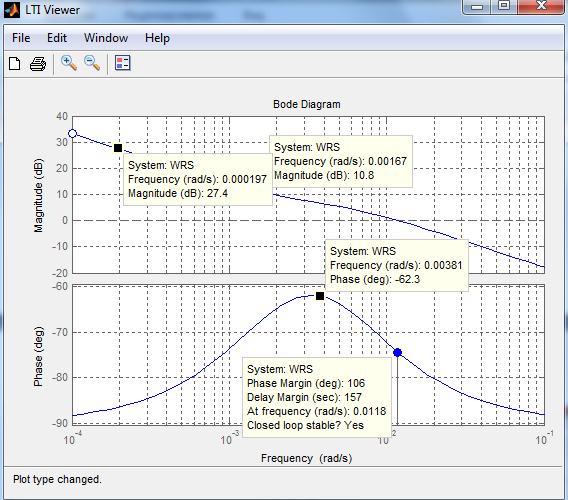
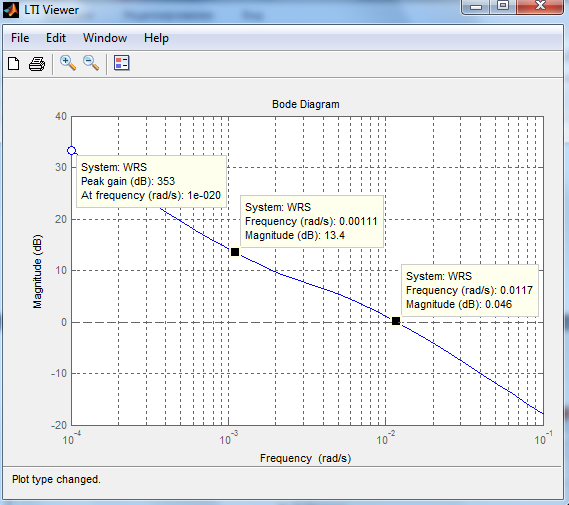
6.8.Функция WRS, Bode
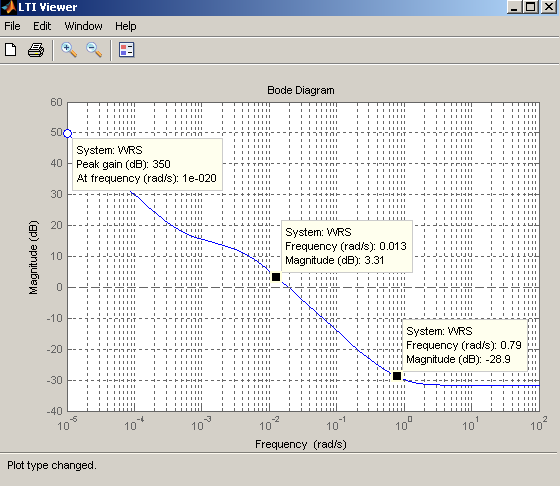
6.9.Функция
WRS, Bode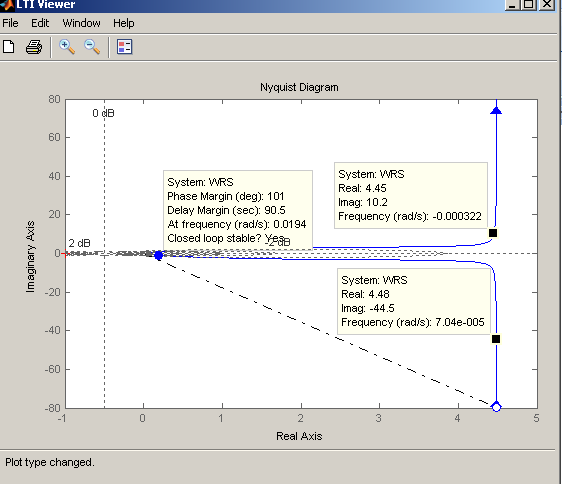
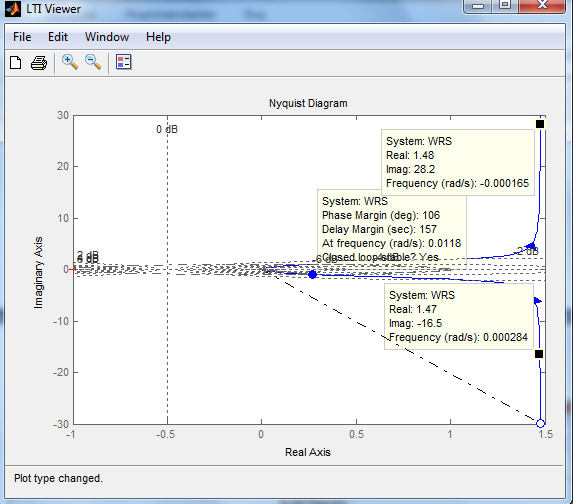
7.0.Функция WRS, Nyquist
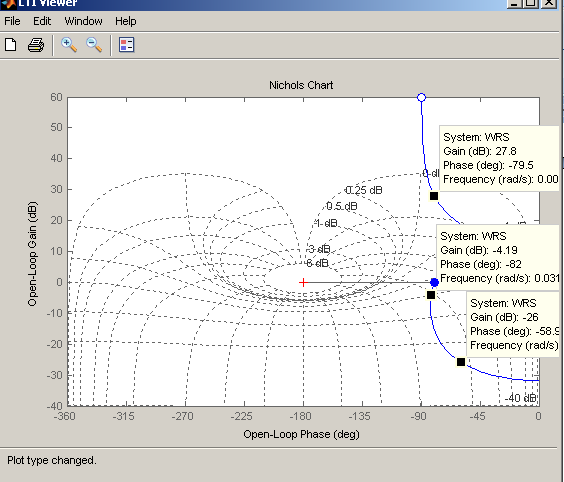
7.1.Функция
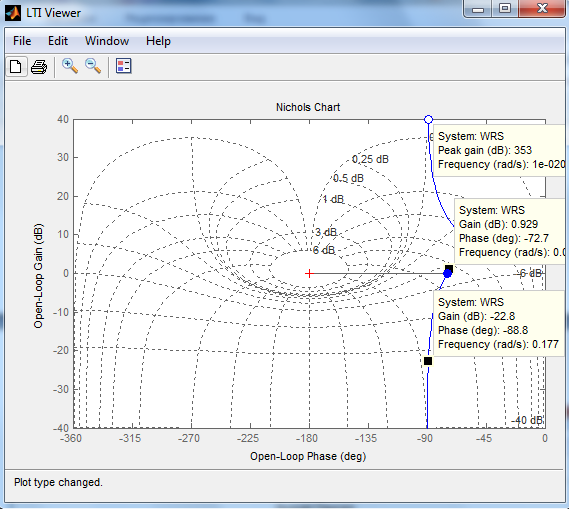
WRS, Nichols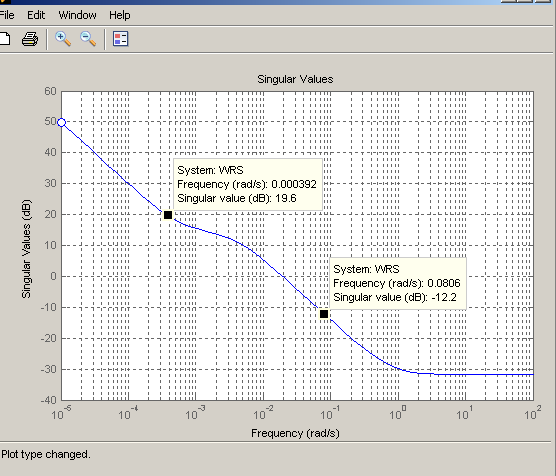
7.2.Функция WRS, Singular
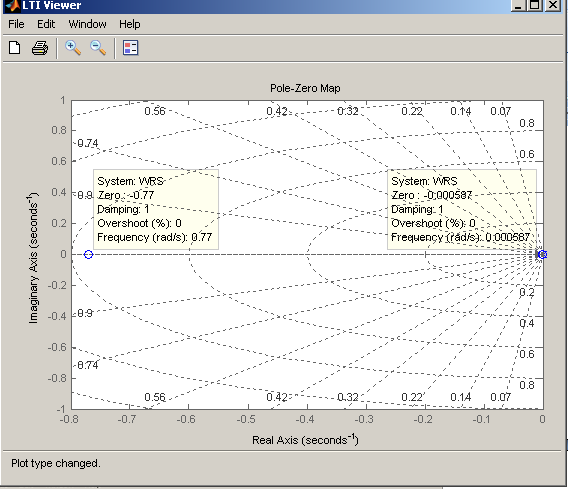
7.3.Функция
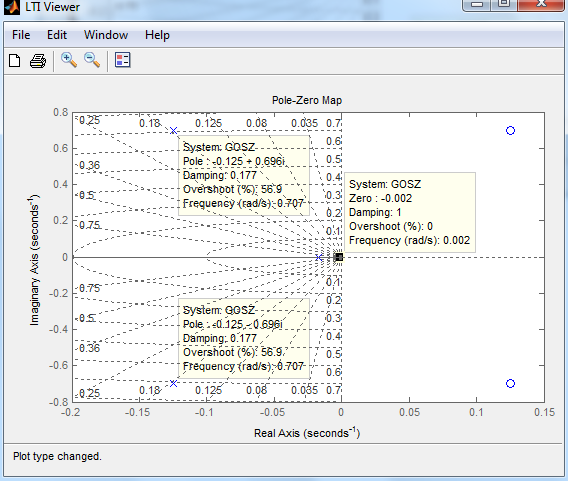
WRS, Pole-Zero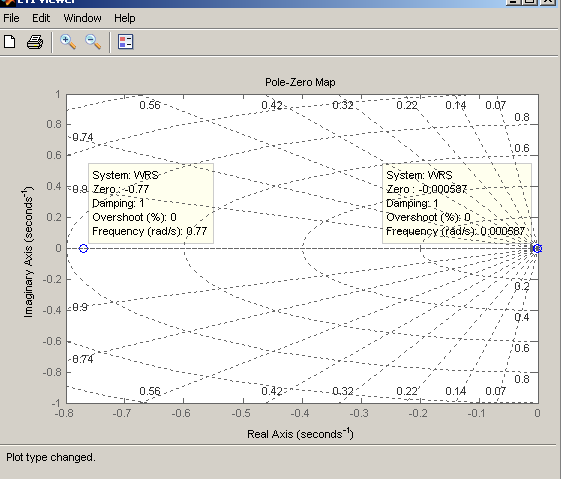
7.4.Функция WRS, Pole-Zero
>>steep (WRS)
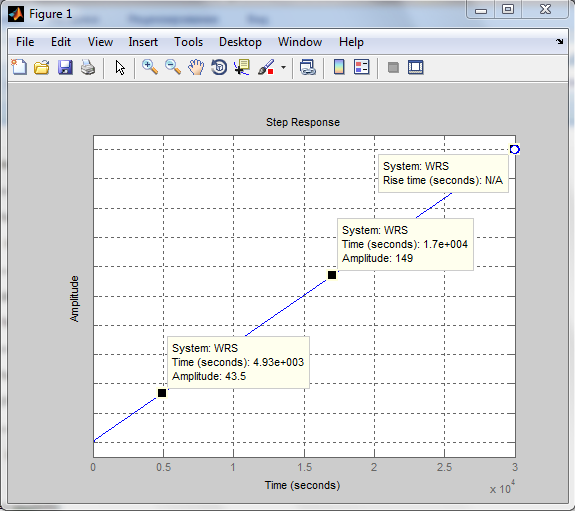
7.5.Функция WRS, Переходная
Замкнем систему отрицательной обратной связью с помощью функции Feedback и определим переходный процесс замкнутой системы.
>> WOZ= feedback (WRS, [1])
Transfer function:
276.5 s^2 + 133.1 s + 0.5
-----------------------------
1.064e004 s^2 + 190.7 s + 0.5
>>ltiview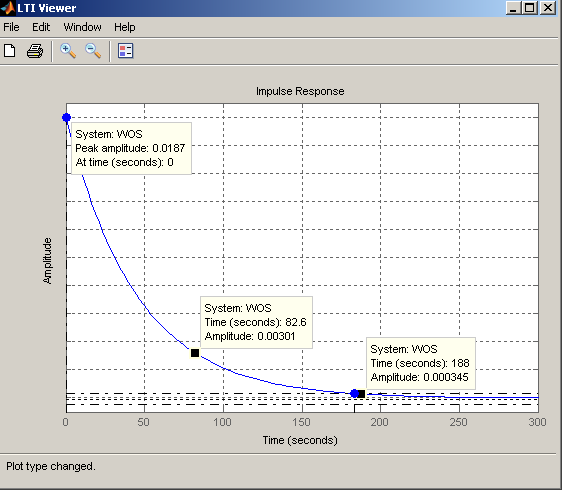
7.5.Функция WOS, Impulse
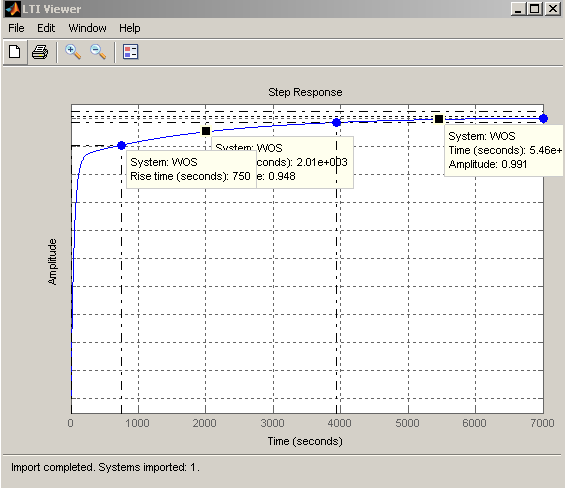
7.6.Функция WOS,
Переходная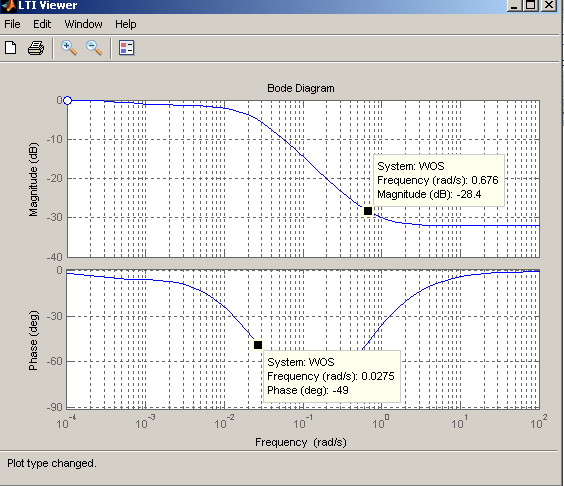
7.7.Функция WOS, Bode
7.8.Функция WOS,
Bode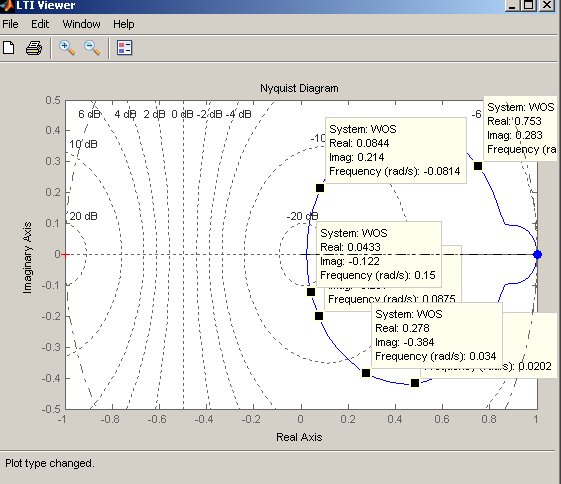
7.9.Функция WOS, Nyquist
8.0.Функция WOS,
Nichols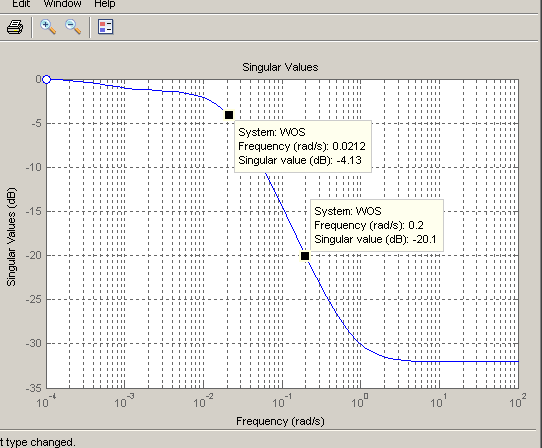
8.1.Функция WOS, Singular
8.2.Функция WOS,
Pole-Zero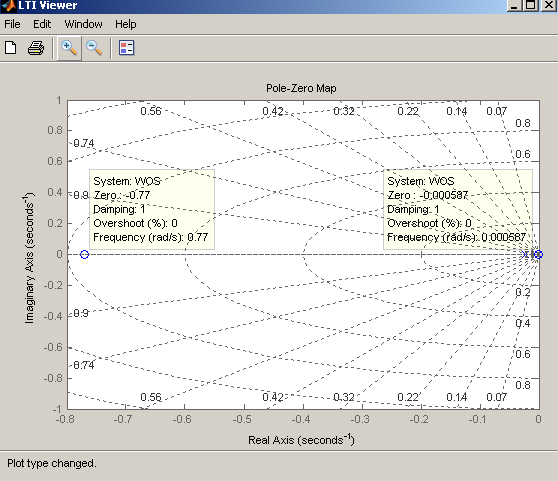
8.3.Функция WOS, Pole-Zero
Рассмотрим замкнутую систему с учетом запаздывания
Составим передаточную функцию звена чистого запаздывания
>> n5= [1 -0.25 0.5]; m5= [1 0.25 0.5]; WZ= tf (n5, m5)
Transfer function:
S ^2 - 0.25 s + 0.5
------------------
S ^2 + 0.25 s + 0.5
Передаточная функция замкнутой системы с ПиД –регулятором и с учетом запаздывания будет иметь вид:
>> GOSZ=WOZ*WZ
Transfer function:
276.5 s^4 + 63.94 s^3 + 105.5 s^2 + 66.4 s + 0.25
----------------------------------------------------
1.064e004 s^4 + 2852 s^3 + 5370 s^2 + 95.45 s + 0.25
>>ltiview