

Варинт 17 моечная установка ремонтно-механической мастерской.
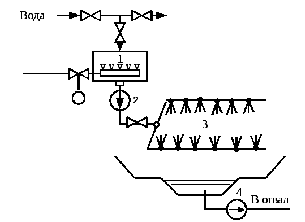
Рис. 2.17. Схема масляной установки РММ: 1 – смешивающий подогреватель;
2 – водяной насос; 3 – распыливающие трубы с соплами; 4 – откачивающий насос; 5 – бак для раствора кальцинированной соды.
Машины моют на специальной установке (рис. 2.17). Вода, предварительно подогретая до температуры 65...80°С и подщелоченная кальцинированной содой (до 3...5 % нормального раствора), распыливается через сопла под давлением 0,4...0,5МПа.
Для расчета САР регулируемым параметром служит температура подогретой воды после теплообменника T0=75 °C. Объект описывается уравнением (1.1, а решение его 1.3).
Максимально допустимое отклонение регулируемого параметра Х1=5 °С. Допустимое остаточное отклонение Хост= ±2,5 °С.
Статические и динамические характеристики камеры приведены в таблице.
|
№ |
Объект автом-и |
Канал регулирования |
τо, с |
T1, с |
T2, мин |
Kоб |
|
17 |
Моечная установка РММ |
Температура воды после теплообменника ─ расход пара |
24 |
180 |
- |
0,5 °С/кг/ч |
МОДЕЛИРОВАНИЯ СИСТЕМ С РЕГУЛЯТОРОМ (П,ПИ,ПИД)
Алгоритм управления
Алгоритм функционирования САУ показывает, как должна изменяться управляемая величина по требованиям технологии без учета динамических искажений. Алгоритм управления (регулирования) показывает, как должно изменяться управляющее (регулирующее) воздействие r(t), чтобы обеспечить заданный алгоритм функционирования x(t).
Законом
(алгоритмом) управления (регулирования)
называют математическую зависимость
выходной координаты регулятора r(t)
от отклонения ɛ(t)
ее производных и интегралов, возмущения
f(t)
его производных и интегралов и других
величин (рис. 1.17). ɛ(t)
Управляющее r(t)
f(t) устройство
(регулятор)
Рис. 2. Управляющее устройство
Входящие в алгоритм величины определяют принципы управления (регулирования):
1. Комбинированный принцип управления (регулирования):
r t = F (ε,ε ,ε ...,ε ,... εdt,...f, f ,..., fdt,...).
2.Принцип управления (регулирования) по возмущению:
r t = F f, f ,..., fdt,...
3. Принцип управления (регулирования) по отклонению:
r t = F2( ) 2(ε,ε, ε ,..., εdt..)
Автоматический регулятор, действующий по отклонению, обязательно реагирует на ɛ, стремясь ее уменьшить. Введение в закон регулирования остальных величин производных и интегралов от ɛ по времени играет вспомогательную роль (используется как коррекция качества регулирования).
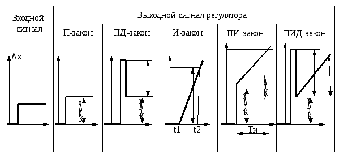
В инженерной практике нашли наибольшее применение т. н. типовые алгоритмы (законы регулирования):
пропорциональный – П:
r(t)=kRε(t).
пропорционально-интегральный – ПИ (пропорциональный с воздействием по интегралу (изодромный)):
r(t)= kRε(t)+ kR t ε(t)dt .
пропорциональный с воздействием по интегралу и первой производной – ПИД (пропорционально-интегрально дифференциальный):
интегральный – И:
r(t)= kR ^t ε(t)dt .
пропорциональный с воздействием по первой производной – ПД (пропорционально-дифференциальный):
r(t)= kRε(t)+k TR
где kR – коэффициент пропорциональности; Tи – время изодрома (время интегрирования); T∂ – время предварения.
П–закон регулирования отработать регулятор может при использовании им величины и знака рассогласования управляемой переменной, т. е. ±Δх.
П – закон автоматического регулятора записывается уравнением вида
u
= — КрΔх,
где Кр–
коэффициент пропорциональности или
усиления.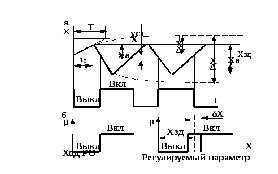
Рис. 1.2. Принцип действия релейного двухпозиционного регулятора:
а – характеристика колебательного режима работы, б – работа регулятора
без нечувствительности (слева), работа регулятора с нечувствительностью (справа)
Знак минус в правой части уравнения указывает на то, что во время работы автоматической системы изменение выходного сигнала регулятора ΔXприводит к изменению величины uв обратном направлении.
Графическое изображение П– закона регулирования показано в табл. 1.2.
Таблица 1.2
ПИ – закон регулирования отработать регулятор может при одновременном использовании им величины и знака рассогласования ±Δх и интеграла от этого рассогласования ∫Δxdt.
ПИ—закон регулирования записывается уравнением вида

 (1.14)
(1.14)
ПИ-регуляторы конструктивно выполняют так, что отрицательная обратная связь в них имеет максимальное воздействие лишь в начальный момент времени, а затем она постепенно снимается действием инерционной положительной обратной связи.
Коэффициент усиления Кр и время изодрома Ти являются параметрами настройки ПИ-регулятора.
ПИД– закон регулирования отработать регулятор может при использовании им величины и знака рассогласования±Δх, а также производной dΔx/dtи интеграла ∫Δxdtотэтого рассогласования.
ПИД—закон регулирования записывается уравнениемвида
 (1.15)
(1.15)
Коэффициент усиления Кр, время изодрома Tи и время предварения Тд являются параметрами настройки ПИД-регулятора.
Преимущество ПИД-регулятора над ПД регулятором обуславливается отсутствием остаточной статической неравномерности, а преимущество над ПИ-регулятором состоит в отработке предваряющего воздействия.
Примеры работы в Matlab с регулятором :
С П-регулятором.
Формируем передаточную функцию регулятора
>> n1= [4.62]; m1= [1]; Kr= tf (n1, m1)
Transfer function:
4.62
Вид передаточной функции регулятора
>> Wr=Kr
Transfer function:
4.62
Формируем передаточную функцию объекта управления
>> n2= [0.5]; m2= [180, 1]; Woy= tf (n2, m2)
Transfer function:
0.5
---------
180 s + 1
Найдем переходный процесс для разомкнутой системы функцией (WRS)
>>WRS=Wr*Woy
Transfer function:
2.31
---------
180 s + 1
>>ltiview
