

Задачник / Глава 14 (358-377)
.pdfГлава 14 Динамическое действие нагрузок на стержневые системы
14.1 Теоретическая и методическая информация. Примеры
14.1.1 Общие замечания
При постепенном, медленном приложении нагрузки к элементам конструкции в них не возникает колебаний и ускорений: в таких случаях принято говорить, что нагрузка статическая. Если же при силовом воздействии в частях конструкции появляются значительные ускорения, а следовательно силы инерции, то эти нагрузки называют динамическими.
Общий подход к расчету элементов сооружений на динамическую нагрузку основан на использовании известного из теоретической механики принципа Даламбера. Согласно этому принципу, всякое движущееся тело можно рассматривать в состоянии мгновенного равновесия, если к действующим на него внешним силам добавить силы инерции, равные произведениям масс системы и их ускорений и направленные в сторону, противоположную ускорению.
Силы инерции в ряде случаев могут быть определены непосредственно. Например, при равноускоренном линейном перемещении, при вращении деталей машин, при колебаниях. В других случаях, в частности при ударе, для определения динамических напряжений и деформаций используется энергетический подход и в частности закон сохранения энергии.
Силы инерции зависят и от массы сооружения, испытывающего динамическое воздействие, и от массы нагружающего тела (например массы движущегося по мосту поезда).
При расчете влияние динамической нагрузки обычно учитывается с помощью так называемого динамического коэффициента. Для получения максимального значения усилия, напряжения, деформации, перемещения и т. п. динамическая нагрузка заменяется статической, а найденные от нее напряжение, перемещение, деформация умножаются на динамический ко-
эффициент: Sд kд Sст .
Естественно, что динамический коэффициент kд зависит и от вида
динамической нагрузки, и от размеров, массы, жесткости сооружения, и от ряда других факторов.
В курсе сопротивления материалов рассматриваются только самые простые случаи динамических воздействий (постоянных сил инерции, колебаний, удара) и решаются несложные задачи.
358

14.1.2 Постоянные силы инерции
Пример 14.1.1. Груз массой m = 3000 кг поднимается лебедкой, установленной на двух двутаврах №20 (рис. 14.1, а) с постоянным ускорением а = 1 мс–2. Собственный вес лебедки G = 5 кН. Проверить прочность балок при 160 МПа, l = 4 м.
G |
№ 20 |
а)
|
|
|
х |
в) |
N |
|
l/ |
|
|
||
|
|
|
|
||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
а |
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
m |
|
|
G1=mg |
б) |
|
G |
|
|
J=ma |
|
|
|
|
 N
N
M |
( N G)l
M max 4
Рис. 14.1
Решение. При подъеме груза на балку действует усилие в тросе N и собственный вес лебедки G. Эпюра моментов от этих сил показана на рисунке 14.1, б. Усилие в тросе N найдем из уравнения равновесия груза, записанного на основании принципа Даламбера (рис. 14.1, в), где J – сила инерции, J=ma,
|
|
|
a |
|
|
N G1 |
J mg ma mg 1 |
|
|
|
Nст kд , |
|
|||||
|
|
|
g |
|
|
где G1 Nст mg – усилие в тросе при статическом действии силы, равной весу груза;
kд 1 ag – динамический коэффициент;
|
|
1 |
|
|
10 3 |
|
|
N 3000 9,8 1 |
|
|
|
|
32,4 |
кН. |
|
|
|
||||||
|
|
9,8 |
|
|
|
|
|
359
Максимальный момент в опасном сечении |
||||||||||||||
M |
max |
|
N G l |
32,4 5 4 37,4 кНм. |
||||||||||
|
|
|
|
|
|
4 |
|
|
|
|
4 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Геометрические характеристики двутавра №20 (ГОСТ 8239-89): |
||||||||||||||
|
|
|
|
|
|
I I |
|
1840 |
см4; W I 184 см3. |
|||||
|
|
|
|
|
|
х |
|
|
|
|
|
|
|
x |
Момент сопротивления составного сечения из двух двутавров |
||||||||||||||
|
|
|
|
|
|
W |
|
|
2I хI |
|
2W I |
368 см3. |
||
|
|
|
|
|
|
x |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
ymax |
|
x |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Максимальное напряжение |
|
|
|
|||||||||||
|
|
|
|
M max |
|
37,4 10 3 |
101,6 МПа < . |
|||||||
max |
|
368 10 6 |
||||||||||||
|
|
|
|
W |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
x
Прочность обеспечивается.
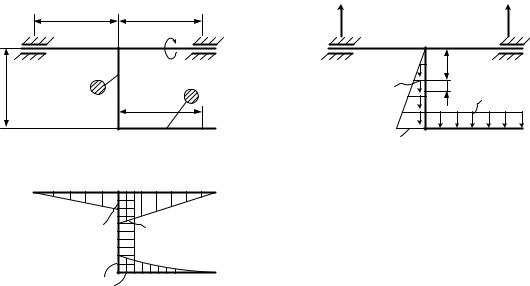
Пример 14.1.2. Брус с осью в виде ломаной линии (рис. 14.2, а) кругового поперечного сечения радиусом R = 1 см равномерно вращается во-
круг оси АС с угловой скоростью 30 рад с 1 . Удельный вес материа-
ла бруса 78 кН м 3 . Проверить прочность бруса при 100 МПа;
l – расстояние между осью стержня DE и осью вращения АС, l = 25 см. Статические напряжения от действия собственного веса элементов конструкции при расчете не учитывать.
а) |
l |
|
l |
|
RA |
|
RС |
|
|
|
|
б) |
|
|
|
|
А |
B |
С |
А |
B |
С |
|
|
|
||||||
|
|
|
|
|
|
z |
|
|
l |
|
l |
|
qz |
dz |
q |
|
|
|
|
|
|
|
|
|
|
D |
|
Е |
q |
D |
Е |
|
|
|
|
||||
в) |
|
17,56 |
|
|
|
|
|
|
|
|
|
|
|
||
|
17,56 |
|
35,12 |
М (Нм) |
|
|
|
|
17,56 |
|
|
|
|
|
|
|
|
|
|
Рис. 14.2 |
|
|
|
360 |
|
|
|
|
|
|
|
Решение. При равномерном вращении бруса с угловой скоростью центробежные силы инерции постоянны во времени. На участке DE центробежные силы распределены равномерно с интенсивностью
q maц.с m 2 r ,
где m |
A |
|
R2 |
|
|
|
||
|
|
|
– масса единицы длины стержня; |
|
||||
|
g |
|
|
g |
|
|
|
|
|
a |
ц.с |
2 r – центростремительное ускорение; |
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
r l – расстояние от DE до оси вращения; |
|
||
q |
R2 2l |
78 103 3,14 0,012 |
302 0, 25 562 |
Нм –1. |
||||
|
||||||||
|
|
|
|
g |
9,8 |
|
|
|
Участок BD нагружен силами инерции, которые изменяются от нуля в точке В до максимума в точке D по линейному закону (рис. 14.2, б):
qz A 2 z . g
Поскольку длина участка BD равна l, максимум сил инерции в точке D совпадает с величиной q, полученной на участке DE. Равнодействующая сил инерции J на участке BD направлена вдоль оси BD,
|
|
|
|
|
J |
ql |
. |
|
||
|
|
|
|
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
Определим опорные реакции: |
|
|
|
|||||||
M A |
0 ; RC |
ql 1,5l Jl |
ql 562 0,25 140,5 Н; |
|||||||
|
2l |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
M C |
0 ; RA |
ql 0,5l Jl |
|
ql |
|
70,25 |
Н. |
|||
|
|
|||||||||
|
|
|
2l |
|
2 |
|
|
|
|
|
Проверка: Y 0 ; |
|
|
|
|
|
|
|
|||
RA RC ql J 70,25 140,5 140,5 70,25 0.
Эпюра изгибающих моментов показана на рис. 14.2, в. Опасное сечение находится справа от точки В, где
M max 35,12 Нм.
Максимальное напряжение в опасном сечении
|
|
|
M max |
|
M max |
4 |
|
35,12 4 10 6 |
44,7 МПа < . |
max |
Wx |
R3 |
|
3,14 0,013 |
|||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Прочность обеспечивается.
361
14.1.3 Напряжения и деформации при колебаниях
Колебания возникают при действии на систему динамической нагрузки и сопровождаются появлением сил инерции, с которой связаны дополнительные напряжения и деформации. Эти дополнительные напряжения могут быть весьма значительными и должны учитываться в расчетах.
Уравнения движения для выбранной расчетной схемы сооружения составляются на основе методов, рассматриваемых в теоретической механике. Наиболее общими являются методы, основанные на применении вариационного принципа Гамильтона или уравнений Лагранжа II рода. Для вывода уравнений движения упругих систем используются также квазистатические способы, основанные на применении принципа Даламбера. В этом случае рассматривается равновесие системы с приложенными к ней силами инерции.
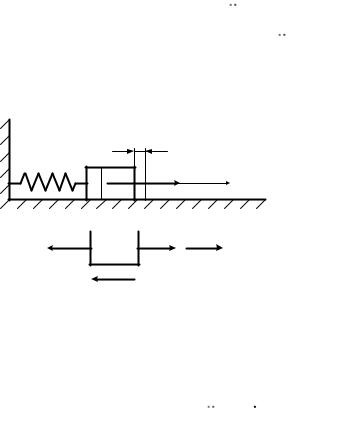
Уравнение движения системы с одной степенью свободы включает в общем случае четыре члена – силу инерции, силу трения, силу упругости и возмущающую силу. Рассмотрим тело массой m (рис. 14.3), которое может перемещаться в заданном направлении и удерживается упругой связью. Уравнение движения этого тела имеет вид:
mx R F F t 0,
где x – ускорение груза; J mx– сила инерции; R – сила трения; F – сила упругости, действующая на тело со стороны упругого элемента; F(t) – возмущающая сила.
х |
|
F(t) |
х |
F |
|
F(t) |
|
J
R
Рис. 14.3
В большинстве упругих систем при достаточно малых перемещениях сила упругости линейно зависит от перемещения x. Если начало отсчета смещения выбирать так, что при x = 0 F = 0, то для линейной системы F = cx, где с – коэффициент жесткости системы.
Для случая вязкого трения, когда сила трения пропорциональна скорости
движения (R = x ), и гармонической
возмущающей силе (F(t) = F0sinωt), дифференциальное уравнение движения принимает вид:
mx x cx F0 sin t ,
где α – коэффициент пропорциональности, характеризующий сопротивление среды; F0 – амплитудное значение возмущающей силы; ω – частота возмущения. Вид уравнения не меняется при действии на систему посто-
362
янных сил (например сил тяжести), если смещение тела отсчитывается от положения его статического равновесия.
|
Вводя обозначения r |
|
, p2 |
|
c |
, приходим к уравнению в сле- |
|||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
2m |
|
|
m |
|
|
|
||||
дующей форме: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
x 2rx p2 x |
F0 |
sin |
t . |
|||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|||
|
Его общее решение имеет вид: |
|
|
|
|
|
|
|
|
||||||||
x e rt C sin p t C cos p t |
|
|
|
|
|
F0 |
|
|
sin t |
||||||||
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
* |
2 |
* |
|
|
p2 2 2 4r2 2 |
|||||||||
|
|
|
|
|
|
|
|
|
m |
||||||||
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|||
где постоянные С1 |
и С2 |
определяются из начальных условий, причем |
|||||||||||||||
|
|
|
|
|
|||||||||||||
p |
|
p2 r 2 |
есть частота затухающих колебаний системы, а угол , |
||||||||||||||
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
характеризующий отставание фазы перемещения от фазы силы, определяется выражением:
tg |
2r |
|
|
. |
|
p2 2 |
||
Первая часть полученного решения представляет собой колебания с частотой p* , которые с течением времени затухают. Вторая часть общего
решения описывает незатухающие установившиеся колебания, происходящие с частотой возбуждения. Амплитуда установившихся колебаний
A |
|
F0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
F0 |
|
|
|
|
|
|
|
. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
m |
p2 2 2 4r2 2 |
|
|
c |
|
|
|
|
|
2 2 |
|
4r2 2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
4 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
p |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Отношение амплитуды А к статическому перемещению xст |
|
F0 |
|||||||||||||||||||||||||||
c |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
2 |
|
4r 2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
p |
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
и представляет собой коэффициент динамичности.
Амплитудное значение напряжений, вызванных действием возмущающей силы, определяется по формуле д ст , где ст – напряжение при статическом действии силы, равной амплитудному значению воз-
363
мущающей силы. При расчете на прочность необходимо учитывать также постоянные во времени напряжения, вызванные в системе весом приложенного к ней груза.
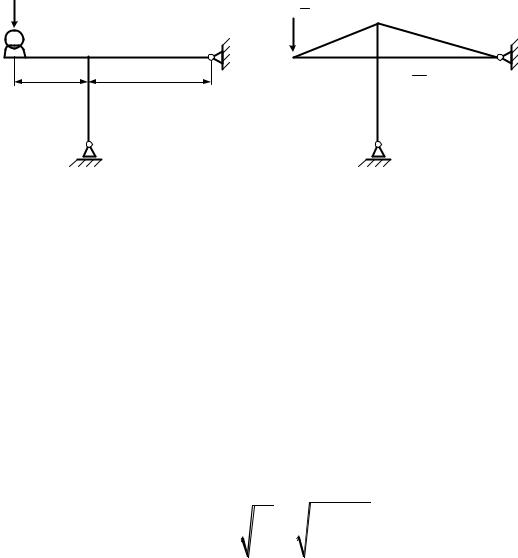
Пример 14.1.3. При работе двигателя массой m = 400 кг из-за неуравновешенности вращающихся частей возникает возмущающая сила
F0 = 0,5 кН. Мотор делает 1000 об мин 1. Полагая, что силы внутреннего трения являются вязкими, определить максимальные и минимальные нормальные напряжения в опасных точках опасного сечения рамы (рис. 14.4,а). Проверить прочность системы в резонансном режиме. Коэффици-
ент затухания колебаний r 2 c 1 . Собственной массой элементов рамы
пренебречь; а = 1 м; l = 2 м; рама изготовлена из двутавра №30; Ix = 5500 см4; Wx = 407 см3.
а) Fosin t
а |
l |
б) |
F 1 |
а |
|
|
M |
Рис. 14.4
Решение. Коэффициент жесткости системы определяется соотношением с 1/ 11 , где 11 – перемещение точки приложения массы от единичной силы. Величину 11 вычислим по формуле Мора с использованием приема Верещагина. Единичная эпюра представлена на рисунке 14.4, б.
|
|
|
1 |
a2 |
|
2 |
|
1 |
|
2 |
|
|
a3 |
1 |
l |
|
|
|
|
|
|
|
|
|
|
|
a |
|
al |
|
a |
|
|
|
|
||
11 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
EIx |
2 3 |
|
2 |
|
3 |
|
|
3EIx |
a |
|
|||||
|
|
|
|
13 |
|
|
|
|
|
|
2 |
|
0,09 10 6 м Н–1. |
|||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||||
|
2 |
11 |
5500 |
|
10 |
8 |
1 |
|||||||||||||||
3 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
c |
|
1 |
|
|
11 106 |
Н м 1. |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
10 6 |
|
|
|
||||||||||||||
|
|
|
|
0,09 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 106 |
|
|
|
|
Частота собственных колебаний p |
|
c |
|
|
|
165,8 |
рад с 1 . |
|||||||||||||||
|
m |
|
400 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
364
Частота вынужденных колебаний
Динамический коэффициент
n 3,14 1000 104,6 рад с 1. 30 30
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
104,62 2 |
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
4r 2 2 |
|
|
|
|
|
|
4 22 |
104,62 |
|||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
4 |
|
|
|
|
2 |
|
|
4 |
|
|
|
|||||||||||||||
|
|
|
|
p |
|
|
|
|
p |
|
|
|
|
|
|
165,8 |
|
|
165,8 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1,66. |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
0,3624 0,000231 |
|
|
|
|
|
|
||||||||||||||||
Существенно отметить, что учет затухания колебаний в данном случае практически не сказывается на результате расчета (второе слагаемое под корнем намного меньше первого).
Наибольшие нормальные напряжения, возникающие от веса двигателя в опасном сечении рамы над стойкой,
|
|
|
M G max |
|
400 9,8 1 |
9,63 106 Па. |
|
G |
|
|
|||||
|
|
W |
|
|
407 10 6 |
||
|
|
|
x |
|
|||
|
|
|
|
|
|
|
|
Наибольшие нормальные напряжения в том же сечении от действия возмущающей силы
|
д max |
|
cт max |
|
F0a |
1,66 |
|
500 1 |
|
2,04 106 Па, |
||||||
|
407 10 6 |
|||||||||||||||
|
|
|
|
|
Wx |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
где cт max |
|
F0a |
|
|
500 1 |
|
1, 228 |
10 |
6 |
Па |
1, 228 МПа. |
|||||
|
Wx |
407 |
10 6 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Динамические напряжения изменяются во времени по симметричному циклу. Суммарные напряжения в опасных точках опасного сечения изменяются по асимметричному циклу, при этом максимальные напряжения
max G д max 9,63 2,04 11,67 МПа,
минимальные
min G д max 9,63 2,04 7,59 МПа.
В резонансном режиме имеет место приближенное равенство p . Динамический коэффициент в резонансном режиме
|
|
|
|
p |
|
165,8 |
41,5. |
|
рез |
|
|
||||
|
|
|
2r 2 2 |
||||
|
|
|
|
||||
Максимальные напряжения при резонансе |
|||||||
max |
G рез ст max |
9,63 41,5 1,228 60,63 МПа < . |
|||||
Прочность обеспечивается.
365
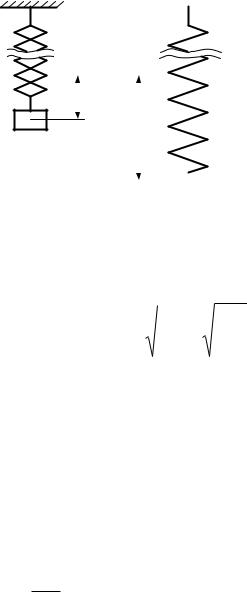
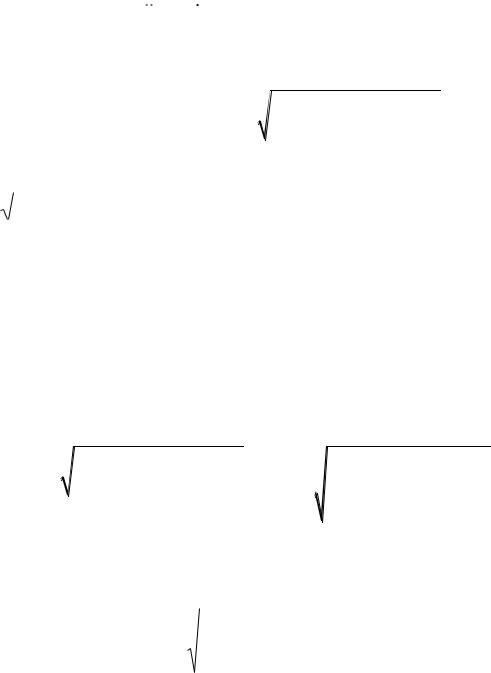
Пример 14.1.4. Груз массой m = 30 кг, подвешенный на двух одинаковых пружинах (рис.14.5, а), находится в состоянии покоя. Одна из пружин внезапно разрушается. Определить период колебаний груза и как изменятся максимальные касательные напряжения в оставшейся пружине, если радиус оси пружины R = 5 см, радиус проволоки пружины r = 0,5 см,
число витков n = 10, модуль сдвига материала пружины G 8 104 МПа. Внутренним трением пренебречь.
а)
m
Решение. Осадка цилиндриче- б) 






 ской винтовой пружины определяет-
ской винтовой пружины определяет-
ся по формуле:
|
|
|
|
|
|
|
|
|
|
|
|
4FR3n |
. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Gr |
4 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ст |
|
|
|
|
|
|
|
|
|
|
|
F, действующее |
|
|||
x |
|
|
|
|
|
|
|
Усилие |
на |
|||||||
|
2 |
|
|
|
|
|
|
|||||||||
|
ст |
|
|
|
|
пружину, связано с коэффициентом |
||||||||||
|
x |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
жесткости линейным соотношением |
||||||||
|
|
|
|
|
|
|
m |
F c . Отсюда |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 14.5 |
|
|
c |
Gr4 |
|
8 104 106 0,0054 |
|
|||||||||
|
|
|
||||||||||||||
|
|
|
|
3 |
n |
|
|
3 |
|
|||||||
|
|
|
|
|
|
|
|
|
4R |
|
4 0,05 10 |
|
||||
104 Н м 1.
Частота собственных колебаний
p |
|
с |
|
|
|
|
|
104 |
18,25 рад с 1 . |
||||||
m |
30 |
||||||||||||||
|
|
|
|
|
|
|
|||||||||
Период колебаний T |
|
2 |
|
|
|
6,28 |
0,34 с. |
||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
p |
18,25 |
||||||||
Положение груза в момент разрушения определяется статической |
|||||||||||||||
деформацией двух пружин xст |
|
mg |
(рис. 14.5, а). Движение груза, вы- |
||||||||||||
|
|||||||||||||||
|
|
|
|
|
1 |
|
|
|
2c |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
званное разрушением одной пружины, начинается без начальной скорости и описывается уравнением x x0 cos pt . Координата x отсчитывается от
положения статического равновесия груза, подвешенного к одной пружи-
не: xст2 mgc (рис. 14.5, б).
Амплитудное отклонение от положения статического равновесия определяется простым соотношением
x0 xст1 xст2 mg / 2c mg / c mg / 2c .
Максимальное удлинение пружины в процессе колебаний
366

|
|
|
max |
x |
|
|
x |
|
|
|
mg |
|
mg |
1,5 |
mg |
. |
|||
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
ст2 |
|
|
0 |
|
|
|
c |
|
2c |
c |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Максимальное усилие, действующее на пружину, |
|||||||||||||||||||
|
|
|
|
|
Fmax c max 1,5mg . |
|
|
|
|||||||||||
Максимальное касательное напряжение |
|
|
|
||||||||||||||||
|
2FR |
|
2 1,5mgR |
|
|
|
3 30 9,8 0,05 10 6 |
||||||||||||
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
112 МПа. |
||
|
r3 |
|
r3 |
|
3,14 0,0053 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
Отношение перемещений max 3, т. е. после разрушения одной из
xст1
пружин ее удлинение увеличивается в три раза. Поскольку напряжение в пружине линейно связано с ее удлинением, то и касательные напряжения в пружине станут в три раза больше.
14.1.4 Напряжения и деформации при ударе
Напряжения и перемещения при ударном действии нагрузки определяются по формулам:
|
д kд cт ; |
д kд cт . |
Здесь д |
и д – динамические напряжения и перемещения при ударе; |
|
cт |
и cт – напряжения и перемещения, вызванные статическим |
|
действием силы, равной весу падающего груза. Динамический коэффициент при ударе без учета массы конструкции,
подвергающейся удару, определяется по формуле:
k |
|
1 |
1 |
2H |
|
, |
д |
|
|||||
|
|
|
ст |
|||
|
|
|
|
|||
где Н – высота падения ударяющего груза.
Пример 14.1.5. На стальной стержень со ступенчато меняющимся поперечным сечением (рис. 14.6, а) с высоты Н падает груз массой m.
Определить максимальные напряжения в стержне. Как изменятся максимальные напряжения, если в верхней части стержня высверлить отверстие глубиной 2,8l (рис. 14.6, б)? Диаметр отверстия выбран таким образом, чтобы площадь ослабленного сечения в верхней части была равна
A1. m = 40 кг; Н = 0,02 м; A1 = 5 см2; A2 = 10 см2; l = 0,1 м.
367