

новая папка / mami_auto122
.pdfРис. 1.9.4. Расположениепедалейуправлениялегковымавтомобилем:
а - общее расположение основных органов управления; б - три педали – трансмиссия со ступенчатой коробкой передач; в-две педали – автоматическая трансмиссия(численныезначенияпараметровсм. втабл. 1.9.3.)
Таблица1.9.3.
Расположение педалей управления легковым автомобилем
Обозна- |
Значение в зависимости от трансмиссии, мм |
|
||||
Со ступенчатой |
коробкой |
Автоматическая |
||||
чение на |
||||||
передач |
|
|
||||
рис. 1.9.4 |
|
|
|
|
|
|
Макси- |
Мини- |
|
Макси- |
Мини- |
||
|
|
|||||
|
мальное |
мальное |
|
мальное |
мальное |
|
|
|
|
|
|
|
|
Е |
100 |
50 |
|
100 |
50 |
|
F |
— |
50 |
|
— |
— |
|
G |
— |
50 |
|
— |
— |
|
Н |
— |
130 |
|
— |
130 |
|
J |
— |
160 |
|
— |
120 |
|
101
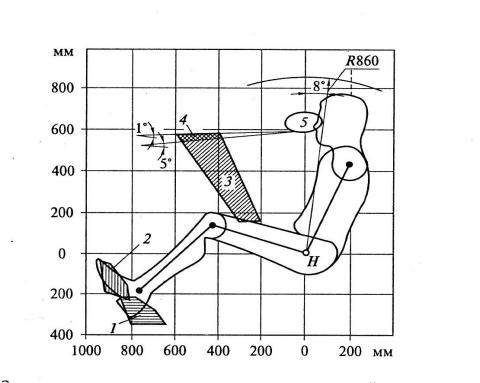
Рис. 1.9.5. Зоны расположения рулевого колеса и педалей легкового автомобиля:
1 – зона расположения точки В; 2 – зона расположения точки А; 3 – целесообразная зона расположения рулевого колеса; 4 – допустимая зона расположения рулевого колеса; 5 – зона вероятного расположения глаз водителя.
Удобство управления автомобилем во многом зависит от формы рычагов и рукояток органов управления, их размещения относительно тела водителя, удаленности друг от друга, направления перемещения, усилий, которые нужно прикладывать для их перемещения. Учитывая наличие различных по степени удобства зон в пределах моторных полей водителя, органы постоянного использования следует размещать в оптимальной рабочей зоне, а органы эпизодического использования – в нормальных и максимальных зонах. На рулевой колонке располагают рычаги переключения указателей поворота, рукоятки управления стеклоочистителем и омывателем стекол, кнопку звукового сигнала. На передней панели находятся ключ зажигания, рукоятки управления воздушной заслонкой, включателем отопления, вентиляции и т. п.
Место расположения рычага переключения передач зависит от усилия, необходимого для его перемещения. Вследствие этого рычаг следует располагать в оптимальной зоне рабочих движений водителя. Рукоятку стояночного тормоза размещают в этой же зоне.
Размеры, определяющие расположение основных органов управления грузовым автомобилем, приведены на рис. 1.9.5 и в табл. 1.9.3.
Рукоятка рычага управления коробкой передач должна располагаться в зоне, выделенной штриховкой на рис. 1.9.3.
102

На легковых автомобилях педали управления располагаются в соответствии с рис. 1.9.5 (ГОСТ Р 41.35 — 99) и табл. 1.9.3.
Для определения положения основных органов управления легковым автомобилем относительно точки R можно пользоваться данными, приведенными на рис. 1.9.5, где штриховкой выделены целесообразные зоны расположения точки А — условной точки приложения усилий ноги водителя к педалям, точки В — пятки (располагается на уровне пола), рулевого колеса и педалей (РД 37.001.003 — 82). Расстояние между точками А и В — 200 мм вдоль стопы, остальные размерные соотношения определяются с помощью координатной сетки рисунка.
Интересное рулевое колесо преложила известная своими инновациями фирма Citroen: на модели С4 она установила руль, на ступице которого собраны практически все необходимые для управления автомобилем кнопки (рис. 1.9.6). На ступице разместились кнопки управления коробкой передач, аудиоаппаратурой и многое другое. Причем новая ступица привлекает внимание не столько своей многофункциональностью, а тем, что остается на месте, несмотря на угол поворота рулевого колеса.
Рис. 1.9.6. Руль Citroen С4
Среди современных автомобилей больше становится тех, что оснащены усилителем рулевого управления (PAS). Этому способствуют два фактора. Первый - тенденция конструкторов использовать преимущества PAS для получения характеристик, которые облегчали бы управление. Другой - способность покупателя оплатить системы, облегчающие вождение.
Переход от обычного рулевого управления на привод с усилителем, вызван необходимостью снижения усилия, прикладываемого к рулевому колесу при движении с низкой скоростью и при максимальном угле поворота рулевого колеса.
103
Много лет стандартный метод обеспечения PAS энергией состоял в том, что использовался приводимый двигателем гидравлический насос, давление которого подавалось с любой стороны силового цилиндра через клапаны, управляемые поворотом рулевого колеса. Со временем гидроусилители стали более функциональными и надежными, обеспечивая такие особенности, как чувствительная к скорости степень усиления и обеспечения более высокого качества обратной связи, чтобы водитель не чувствовал, что его «разъединили» с передними колесами - недостаток большинства ранних конструкций усилителей рулевого управления, особенно в американском производстве.
Системы PAS работают, как правило, используя систему контрольных клапанов, а не управляя непосредственно через систему сервоклапанов, которая требовала бы более высоких давлений. Citroen - единственный производитель, который использовал систему высокого давления в массовом производстве, получая его от гидропневматической системы подвески. В подавляющем большинстве систем гидроусилителей давление от управляемого двигателем насоса больше необходимого. Полное использование мощности, как на Citroen, имеет множество преимуществ, включая интересную особенность рулевого управления возвращаться в нейтральное положение, когда автомобиль неподвижен, пока двигатель работает, обеспечивая усилитель энергией. Для обеспечения полной безопасности конструкция PAS должна быть спроектирована таким образом, чтобы обеспечить возможность перехода к обычному ручному управлению в случае нарушения герметичности гидропровода или любой другой неисправности.
Некоторые производители оборудуют свои автомобили системой управления усилия на руле (PPS - progressive power steering). В ней с помощью компьютера усилие на руле изменяется в зависимости от угла поворота рулевого колеса и скорости движения автомобиля. В результате этого при парковке и низких скоростях руль крутится очень легко. А при движении по трассе с высокими скоростями это усилие значительно тяжело и руль «наливается» тяжестью.
В последнее время наблюдается тенденция перехода к усилителям, которые имеют электрогидравлический (рис. 1.9.7) или электрический (рис. 1.9.8) привод.
104
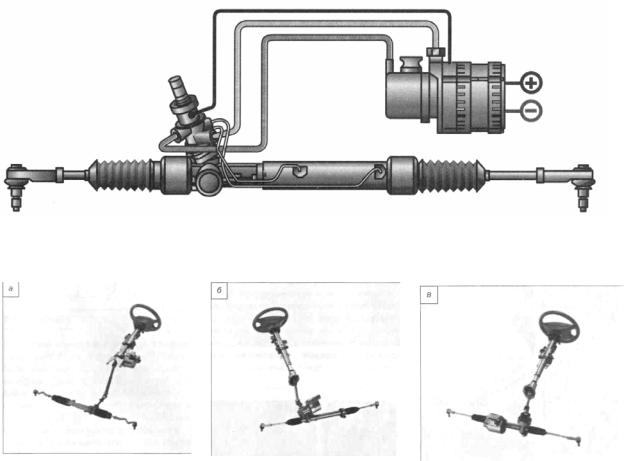
Рис. 1.9.7. Электрогидравлический рулевой усилитель
Рис. |
|
1.9.8. |
Электрические |
усилители |
|
рулевого |
управления: |
|||
а |
|
– |
с |
воздействием |
на |
рулевой |
вал; |
|||
б |
– |
с |
воздействием |
на |
шестерню |
рулевого |
|
механизма; |
||
в – с воздействием на рейку рулевого механизма
Оба новых типа усилителей потребляют энергию только тогда, когда нужна помощь рулевому управлению, а их установка более проста, так как не требует дополнительного подключения управляющего насоса ременным приводом к коленчатому валу, что снижает нагрузку на двигатель и, как следствие, повышает его экономичность. Электрогидравлическая конструкция требует емкости для гидравлического насоса, приводимого в действие электрическим двигателем и трубопроводом, хотя данная конструкция может уместиться в довольно компактный модуль. Чистая электрическая система состоит, по существу, из электрического двигателя, пристроенного к рулевому приводу, модулю управления и соответствующих датчиков. Наиболее важным является датчик угла поворота управляемых колес автомобиля.
Полностью электрические усилители управления (EPAS) имеют еще и дополнительное преимущество, они легко адаптируются к скорости движения автомобиля, получая от двигателя сигнал управления. Но недостаток систем ЕРAS заключается в том, что они требуют дополнительной электрической энергии, запас которой на борту
105
современного автомобиля уже приблизился к критической планке. Впервые серийное использование EPAS началось на небольших переднеприводных автомобилях Renault Twingo и Fiat Punto. Испытания, проведенные фирмой Delphi, которая поставляет свои EPAS для Fiat Punto, подтвердили, что переход от гидравлического к электрическому усилителю приводит к повышению эффективности и экономии. Так, при использовании EPAS была достигнута экономия топлива 0,3 л/100 км, выигрыш 0,5с при разгоне с места до 100 км/ч и 3 с при разгоне с места на дистанции в 400 м. Delphi также указывает на легкость, с которой могут быть изменены характеристики EPAS. Fiat Punto имеет выключатель, управляемый водителем, который вдвое увеличивает усиление рулевого управления при движении по городу с низкой скоростью и при постановке автомобиля на стоянку. Но если появился датчик угла поворота рулевого колеса, то почему тогда вообще не отказаться от традиционной конструкции руля? Отказ от традиционной рулевой колонки позволит исключить из салона автомобиля один из травмоопасных предметов. Кроме того, джойстик мог бы нести функции педали акселератора: качнул вперед - быстрее, качнул назад медленнее. Джойстиком, установленным на центральном пульте, могут управлять как водитель, так и пассажир, не придется строить отдельно автомобили с правым или левым рулем, можно будет использовать подушки безопасности равного объема.
1.10.Электронные системы управления автомобилем
Внастоящее время автомобиль трудно представить без широко используемой электроники.
Первые патенты на антиблокировочные системы (АБС) появились в конце 20-х гг. Однако лишь в 1969г. началась серийная установка антиблокировочной системы тормозов на легковых автомобилях, а впоследствии и на грузовых.
Применение АБС способствовало:
- повышению активной безопасности автомобиля, т. е. повышению тормозной эффективности (особенно на скользких поверхностях), улучшению устойчивости и управляемости; - увеличению средней скорости движения; - продлению срока службы шин.
По существующим международным нормам сегодня в обязательном порядке должны оборудоваться антиблокировочной системой следующие транспортные средства:
- грузовые автомобили весом более 3,5 т; - автобусы весом более 5 т; - прицепы и полуприцепы весом более 5 т.
Другие автотранспортные средства, в т. ч. легковые автомобили оборудуются АБС по желанию покупателя или по инициативе фирм-изготовителей
106
автомобилей. Следует отметить, что для большинства современных легковых автомобилей АБС уже стала штатным оборудованием.
Существующие конструкции АБС имеют различный уровень технического совершенства, поэтому их разделили на три категории (1, 2, 3) для автомобилей, на две (А, Б) — для прицепов. Так, например, междугородные и туристические автобусы могут оснащаться только самыми совершенными АБС категории 1. На других типах ТС могут применяться относительно дешевые и простые АБС, устанавливаемые, например, только на задней оси. АБС должна обеспечивать:
-минимальный тормозной путь (не менее 75 % от максимально возможного);
-устойчивость при торможении;
-сохранение управляемости при торможении;
-приспособляемость к изменяющимся внешним условиям, например сцеплению на сухой, мокрой и скользкой дороге (адаптивность);
-плавное торможение, без рывков;
-возможность торможения при выходе из строя АБС;
-минимальный расход рабочего тела;
-минимальное потребление электроэнергии;
-помехоустойчивость по отношению к внешним магнитным полям;
-сигнализацию при выходе из строя АБС, диагностику неисправности;
-общие требования (надежность, низкая стоимость и т. п.).
В состав электронной антиблокировочной системы входят (рис. 1.10.1):
-датчики (угловой скорости колеса, замедления и т. д.);
-электронный блок управления, получающий информацию отдатчиков, обрабатывающий ее и подающий сигналы на исполнительные механизмы и сигнальную лампу;
-исполнительные механизмы (модуляторы давления рабочего тела).
Для поддержания требуемого проскальзывания (пробуксовки) колес необходимо знать значения линейной скорости автомобиля в каждый момент времени, угловую скорость тормозящего колеса, рассчитывать скольжение и управлять модуляторами, установленными в тормозном приводе. С помощью модуляторов изменяют тормозное давление, поступающее к тормозным камерам или рабочим цилиндрам и тем самым, регулируют тормозные силы на колесах.
107
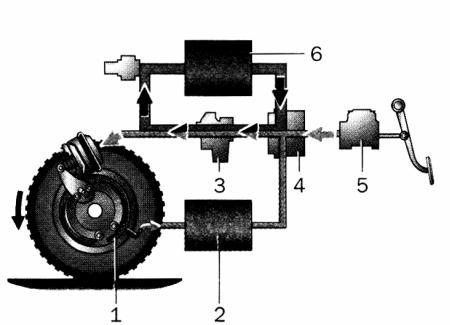
Рис. 1.10.1. Схема электронной АБС: 1 – |
датчик; 2 – |
замер скорости; |
||||
3 |
– |
модулятор; |
4 |
– |
блок |
управления; |
5 – тормозной цилиндр; 6 – замер давления. |
|
|
|
|||
Угловую скорость колеса определяют датчиками, установленными в ступице колеса, или, реже, в главной передаче. Датчик состоит из ротора в виде зубчатого диска (или перфорированного кольца), закрепленного на колесе, и катушки индуктивности, установленной неподвижно с некоторым зазором относительно зубцов диска.
Линейную скорость автомобиля чаще всего определяют косвенным путем — перерасчетом значений, полученных от датчиков угловой скорости колес. Иногда, например, на полноприводных автомобилях линейную скорость рассчитывают по значению замедления в продольном направлении, определяемому с помощью датчика замедления. При достижении величины заданного относительного скольжения (порогового значения) блок управления подает соответствующую команду исполнительному механизму. Существуют различные принципы регулирования: по величине замедления тормозящего колеса; по заданной величине угловой скорости тормозящего колеса; по заданной величине относительного скольжения; по давлению рабочего тела и т. д.
В подавляющем большинстве случаев для выполнения всех требований по адаптивности применяется регулирование тормозящего колеса по его замедлению и скольжению.
Исполнительные механизмы (модуляторы) АБС могут иметь различное устройство: клапанное, золотниковое, диафрагменное, смешанное. Модуляторы по командам блока управления изменяют давление рабочего тела в тормозных камерах или цилиндрах.
108
Различают модуляторы, работающие по двухфазовому (увеличение-сброс давления) и трехфазовому (сброс-выдержка-увеличение давления) рабочим циклам. Современные модуляторы часто имеют усложненный рабочий цикл. Например, фаза увеличения или уменьшения давления состоит из нескольких этапов, отличающихся темпом изменения давления. От частоты, с которой модулятор может осуществлять рабочий цикл, зависит качество работы АБС. Трехфазовый модулятор обеспечивает несколько меньший расход рабочего тела.
Тормозная динамика автомобиля в большой степени зависит от схемы установки элементов АБС на автомобиле и выбранного принципа регулирования.
Наиболее распространены следующие принципы регулирования скольжения колес:
-индивидуальное регулирование скольжения каждого колеса в отдельности
(Individual Regelung) — IR;
-«низкопороговое» регулирование, т. е. регулирование, предусматривающее подачу команд на растормаживание и затормаживание обоих колес оси одновременно по сигналу датчика колеса, находящегося в худших по сцеплению условиях, — «слабого» колеса (Select Low) — SL;
-«высокопороговое» регулирование колес одной оси, когда сигнал подается датчиком «сильного» колеса, т. е. находящегося в лучших по сцеплению условиях (Select High) — SH;
-модифицированное индивидуальное регулирование — Modifizierte Individual Regelung (MIR) представляет собой компромиссное регулирование между SL и IR. Смысл MIR заключается в том, что вначале регулирование осуществляется по «низкопороговому», а затем постепенно происходит переход к индивидуальному регулированию. MIR целесообразно использовать при торможении на опорной поверхности с различным сцеплением под левым и правым колесами, а также на повороте и поперечном уклоне.
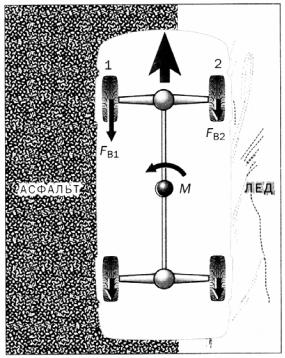
Индивидуальное регулирование является оптимальным с точки зрения обеспечения наилучшей тормозной эффективности (минимального тормозного пути). Для этой цели на каждом колесе размещается датчик частоты вращения и модулятор давления и их параметры регулируются отдельным каналом управления в электронном блоке. Индивидуальное регулирование дает возможность получить оптимальный тормозной момент на каждом колесе в соответствии со сцепными условиями и, как следствие, минимальный тормозной путь. Однако если колеса одной оси будут находиться в неодинаковых сцепных условиях, то тормозные силы на них также будут неодинаковыми. В этом случае возникает разворачивающий момент, приводящий к потере устойчивости (рис. 1.10.2). Управляемость автомобиля при этом сохраняется, т. к. колеса не заблокированы и запас боковой устойчивости остается достаточным. Схема с индивидуальным регулированием является наиболее сложной и дорогой.
109
При выборе схемы АБС обычно исходят из технической и экономической целесообразности. Как показали исследования, соответствуют всем требованиям, а следовательно, относятся к категории 1 АБС имеющие схему регулирования (передние колеса/задние колеса) IR/IR и MIR/IR, а также другие схемы (MIR/SL, SL/IR) если принцип SL используется на оси (осях), обеспечивающей не более 50 % суммарной тормозной силы. АБС, использующие принцип SL на обеих осях АТС (SL/SL), относятся к категории 2. В АБС категории 3, как правило, реализуется схема — SL.
Система встраивается в штатную тормозную систему и не требует изменения ее конструкции. Преимущества таких систем заключаются в простоте и удобстве компоновки на автомобиле.
Система содержит гидравлический узел, располагаемый между главным тормозным и колесным цилиндрами, датчики частоты вращения, монтируемые у передних колес и у главной передачи, и электронный блок управления (ЭБУ), устанавливаемый в салоне или в моторном отсеке автомобиля. На полноприводных автомобилях к датчикам частоты вращения добавляется датчик продольного замедления. Гидравлический узел состоит из насоса с электродвигателем, модулятора с тремя электроклапанами, двух аккумуляторов с демпфирующими камерами.
Рис. |
1.10.2. |
Разворачивающий |
момент, |
приводящий к потере устойчивости |
|
|
|
На рис. 1.10.3 показана схема системы АБС 2-го поколения, разработанная фирмой Bosch для легковых автомобилей с гидравлическим тормозным приводом.
110