

4.2. Составление функциональной структуры
САР в зависимости от их назначения, требуемой точности и конструктивного исполнения могут иметь различную сложность. Поэтому первое, с чего нужно начинать изучение заданной системы, - это выяснить, из каких элементов она состоит и какая функциональная взаимосвязь существует между ними.
Функциональная структура – это структура, элементами которой являются функции, а связи отражают порядок их реализации в системе. Функциональные схемы изображаются в виде прямоугольников, соединенных линиями со стрелками, указывающими направление сигналов. Каждый отдельный прямоугольник на функциональных схемах отображает элемент, играющий конкретную роль в системе.
Рассмотрим типовую функциональную структуру дискретной системы управления с управляющим вычислительным комплексом (УВК). Измерительная система технологического параметра осуществляет преобразование физической величины Y(t)в токовый сигналI(t). Этот сигнал поступает в УВК. С помощью специальной программы с определенной дискретностью производится коммутация этого сигнала аналого-цифровым преобразователем (АЦП). Далее выполняется опрос кода АЦП и преобразование кода в действительное значение технологического параметраY[t]с использованием функциональной зависимости показаний датчика от величины измеряемого параметра. С целью устранения шумов производится фильтрация полученного значения параметра. Программы, реализующие функции опроса, коммутации и фильтрации, осуществляют первичную обработку информации.
После первичной обработки информации в соответствии с принятым алгоритмом управления рассчитывается управляющее воздействие X[t], соответствующее положению регулирующего органа или его приращения. Это значение пересчитывается либо в длительность включения интегрирующих исполнительных устройств, либо в величину кода. После чего программно реализуется вывод этих значений на выходные модули устройства связи с объектом (УСО). В соответствии с выходными сигналами УСО устройства локальной автоматики совместно с исполнительным механизмом устанавливают регулирующий орган в заданное положениеX(t).
Рассмотренная функциональная структура приведена на рис.1.
4.3. Исследование свойств объекта регулирования по каналам управления и возмущения по его математической модели в виде передаточной функции.
В курсовой работе необходимо дать оценку свойств объекта регулирования (ОР) по различным каналам передачи информации, используя временные и частотные характеристики. Для этого необходимо проделать следующие операции:
1. получить модель ОР в операторной форме по каждому каналу и изобразить операторную схему с указанием канала управления и возмущения.
2. получить уравнение статики ОР, изобразить его статистическую характеристику, оценить работу ОР в установившемся режиме.
3. получить выражения для переходной и весовой функции ОР (расчет переходной и весовой функции может быть произведен классическим
методом или с применением преобразования Лапласа), построить графики входных и выходных сигналов с указанием размерности величин, по графикам оценить динамические свойства ОР.
4. вывести выражения для частотных характеристик элемента: амплитудно-фазовой частотной характеристики (АФЧХ), амплитудно-частотной характеристики (АЧХ), и фазо-частотной характеристики (ФЧХ), построить графики этих функций, оценитьпо нимсвойства ОР в частотной области.
Пункты 2, 3, 4 необходимо повторить для каждого канала передачи информации.
ПРИМЕР.
1. Изобразим объект регулирования в виде «черного ящика». Входными воздействиями объекта будут: управляющее и возмущающее воздействия, а выходной переменной - управляемая переменная объекта.

Рис. 2. Модель объекта регулирования в виде «черного ящика»
Модель объекта может быть представлена в виде дифференциального уравнения и передаточной функции.
Пусть передаточная функция объекта по рассматриваемому каналу имеет вид:
![]() (1)
(1)
где ко- коэффициент передачи объекта;
То– постоянная времени объекта;
τ о– запаздывание информации по рассматриваемому каналу.
Дифференциальное уравнение, соответствующее модели вида (1) будет представлено выражением:
![]() (2)
(2)
Пусть объект регулирования представляет собой участок трубопровода после машинного бассейна, в котором требуется поддерживать постоянное значение концентрации бумажной массы. Канал передачи управляющего воздействия - «изменение давления воздуха в камере исполнительного механизма – изменение концентрации массы после смесительного насоса», канал передачи возмущающего воздействия - «изменение концентрации массы, поступающей в машинный бассейн - изменение концентрации массы после смесительного насоса». Тогда модель ОР в виде «черного ящика» примет вид, представленный на рис.3.
Управляемая переменная объекта - изменение концентрации массы после смесительного насоса Δc(t), % конц.;
управляющее воздействие - изменение давления воздуха в камере исполнительного механизма Δp(t), МПа;
возмущающее воздействие - изменение концентрации массы, поступающей в машинный бассейн Δcм(t), %конц.

Рис. 3. Модель объекта регулирования в виде «черного ящика» для рассматриваемого примера
Передаточная функция ОР по каналу управления имеет вид:
![]() ,
,
где ΔС(р) – изображение по Лапласу управляющего воздействия,
ΔР(р) – изображение по Лапласу управляемой переменной.
Численные значения параметров модели
приводятся в задании на курсовое
проектирование, в рассматриваемом
примере
![]() ,To=60
с, τo=10
с.
,To=60
с, τo=10
с.
Тогда
![]() и соответствующее дифференциальное
уравнение представлено выражением:
и соответствующее дифференциальное
уравнение представлено выражением:
![]()
2. Найдем статическую модель объекта по каналу управления.
Статическая модель определяет соотношения между входной и выходной величиной элемента системы регулирования в установившемся режиме. Обычно эта зависимость выражается алгебраическим уравнением, которое получается из дифференциального, приравниванием к нулю всех производных. Проделав эти операции, получим:
![]()
где ∆Qвыходи ∆Qвход- установившиеся значения входного и выходного сигналов.
Для рассматриваемого примера по каналу
управления статическая модель ОР будет
описываться выражением![]() .
Статическая характеристика изображена
на рис.4. Так как объект является
линейным звеном, то его статическая
характеристика изображается в виде
прямой линии с тангенсом угла наклона
равным К0=-1.
.
Статическая характеристика изображена
на рис.4. Так как объект является
линейным звеном, то его статическая
характеристика изображается в виде
прямой линии с тангенсом угла наклона
равным К0=-1.

Рис.4 Статическая характеристика объекта
3. Найдем переходную и весовую функции объекта по каналу управления.
Переходная функция h(t) определяется как переходный процесс на выходе звена при подачи на него вход единичного ступенчатого воздействия 1[t] при нулевых начальных условиях. Это воздействие имеет ту же размерность, что и физическая величина на выходе звена. Поэтому, что бы получить переходную функцию звена, нужно изменить его входной сигнала на одну единицу.
Как известно из теоретической части курса, переходная функция апериодического звена 1-го порядка с запаздыванием определяется выражением:
 , (3)
, (3)
размерность h(t) – размерность выходной величины.
Время окончания переходного процесса бесконечно большое. Поэтому для расчета переходной функции необходимо его приблизительно оценить.
Примерное время окончания переходного
процесса можно найти по выражению:
![]() .
Шаг расчета должен быть удобным, чтобы
с одной стороны число точек было не
слишком большим и в тоже время по графику
было удобно проследить характер изменения
выходного сигнала, особенно при наличии
запаздывания.
.
Шаг расчета должен быть удобным, чтобы
с одной стороны число точек было не
слишком большим и в тоже время по графику
было удобно проследить характер изменения
выходного сигнала, особенно при наличии
запаздывания.
Для рассматриваемого примера
 .
.
Время окончания переходного процесса
![]() .
Шаг расчета выбираем равным величине
запаздывания Δt=10c.
.
Шаг расчета выбираем равным величине
запаздывания Δt=10c.
Весовая функция w(t) представляет собой переходный процесс на выходе звена на единичную импульсную функциюtпри нулевых начальных условиях. Единичная импульсная функция является производной от единичной ступенчатой функцииt= 1’t, поэтому размерностьtравна размерности физической величины на выходе звена, деленной на время. Весовая функцияw(t) определяется дифференцированием переходной функции 1-го порядка со звеном запаздывания.
Получаем:
 , (4) или
для нашего примера
, (4) или
для нашего примера
 .
.
Результаты расчета переходной и весовой функции должны быть представлены в таблице, по данным таблицы строят графики. Фрагмент расчета временных характеристик и графики переходной и весовой функций, выполненные в табличном редакторе MicrosoftExcelпредставлены на рис.5. Подробно приемы построения временных характеристик рассмотрены в [1] и изучаются в 6 семестре.
4. Выражения для частотных характеристик объекта по каналу управления могут быть получены из выражения частотной передаточной функции:
![]() , (5)
, (5)
тогда АЧХ объекта определяется из
выражения:
![]() ,
(6)
,
(6)
ФЧХ объекта определяется из выражения:
![]() .
(7)
.
(7)

Рис.5 Фрагмент расчета временных характеристик объекта регулирования
Частота пр,
определяющая полосу частот пропускания
объекта, находится из условия:
![]() приω=0.
приω=0.
Частотную характеристику необходимо строить на диапазоне частот от 0 до 1015пр. АЧХ покажет, как пропустит объект сигналы возмущения различной частоты. Ордината графика АЧХ имеет размерность коэффициента передачи по рассматриваемому каналу.
ФЧХ покажет фазовые сдвиги, вносимые звеном в выходной сигнал на различных частотах возмущения.
Расчет АЧХ и ФЧХ так же удобно выполнять в табличном редакторе MicrosoftExcel.
Для нашего примера выражения (5), (6), (7) примут вид:
![]() , (5*)
, (5*)
![]() , (6*)
, (6*)
![]() . (7*)
. (7*)
Графики амплитудно- и фазочастотных
характеристик приведены на рис. 6. При
расчете использовали значение частоты
пропускания, равной для рассматриваемого
примера
![]() .
.
АФЧХ можно построить по выражению
частотных характеристик, если его
записать в виде:
![]() ,
(8)
,
(8)
где
![]() (9)
(9)
![]() (10)
(10)
Результаты расчета и график изменения АФЧХ приведены на рис.7.
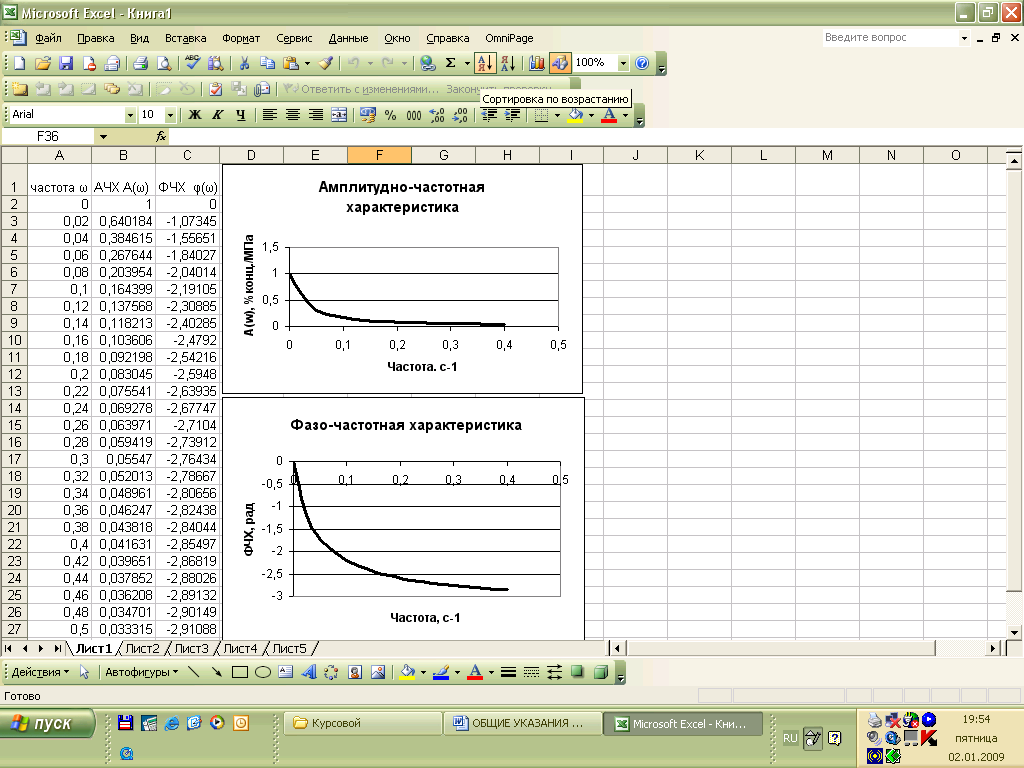
Рис.6 Фрагмент расчета частотных характеристик объекта регулирования

Рис. 7. Фрагмент расчета АФЧХ объекта регулирования