

11.3. Основные требования к авторулевым
Автоматическим рулевым ( авторулевым ) называют прибор, предназначенный для автоматического управления рулевым приводом с целью удержания судна на заданном курсе.
Авторулевые относятся к оборудованию судов, на которое распостраняются требо-
вания Международной конвенции по охране человеческой жизни на море ( SOLAS-74 ).
К основным требованиям относятся следующие:
авторулевой должен удерживать судно на курсе:
.1. с точностью ±1º при скорости не менее 6 узлов;
.2. при амплитуде рыскания не более 1º при состоянии моря до 3 баллов и 4º - до 5 баллов;
авторулевой должен иметь устройство, прекращающее кладку пера руля при 35º на каждый борт;
должна быть световая сигнализация о наличии питания в схеме;
должна быть световая сигнализация об используемом виде управления;
должна быть световая и звуковая сигнализация о перегрузке рулевого привода;
рекомендуется иметь звуковую сигнализацию о недопустимых отклонениях от заданного курса при автоматическом управлении;
система управления авторулевым должна быть самосинхронизирующейся, т.е. исключать дополнительные действия при переходе с одного вида управления на другой;
на пульте авторулевого должно быть простое и надёжно действующее устройст-
во для ручного управления рулём в виде штурвала или кнопочного поста управления с кнопками «Лево», «Право»;
переход с автоматического управления на ручное должен осуществляться одной манипуляцией в течение не более 3 с при любом положении руля;
в авторулевых рекомендуется иметь устройство, которое при автоматическом управлении позволяет изменять курс по крайней мере на ±10º без перехода на ручное управление;
в авторулевых рекомендуется иметь 2 выносных поста управления, позволяю-
щих при автоматическом управлении выполнить экстренный поворот на любой угол, вплоть до полной циркуляции;
пульт автоматического и ручного управления должен находиться в диаметраль-
ной плоскости судна, чтобы исключить его влияние на магнитный компас;
выносные пульты управления должны находиться на крыльях мостика или в других местах, удобных для немедленного перехода на управление с этих постов.
12. Системы управления рулевыми электроприводами
12.1. Основные сведения
Ниже рассматриваются три характерных системы управления рулевыми электроприводами:
1. простого управления, при помощи кнопок «Лево руля», «Право руля»;
2. следящего управления, при помощи штурвала;
3. автоматического управления.
12.2. Система простого управления секторным рулевым электроприводом
Основные сведения
Схема простого управления рулевым электроприводом по системе Г – Д применя-
Ется на транспортных судах типов «Волго-балт» и «Волго-Дон» ( рис. 10.23 ).
Схема предназначена для управления рулевым электроприводом при помощи кно-очного поста с кнопками «Лево», «Право» и «Ускорение». Такой вид управления называ-
ется простым..
Кнопки «Лево», «Право» задают направление перекладки пера руля, кнопка «Уско-
рение» при её нажатии увеличивает скорость перекладки пера руля.
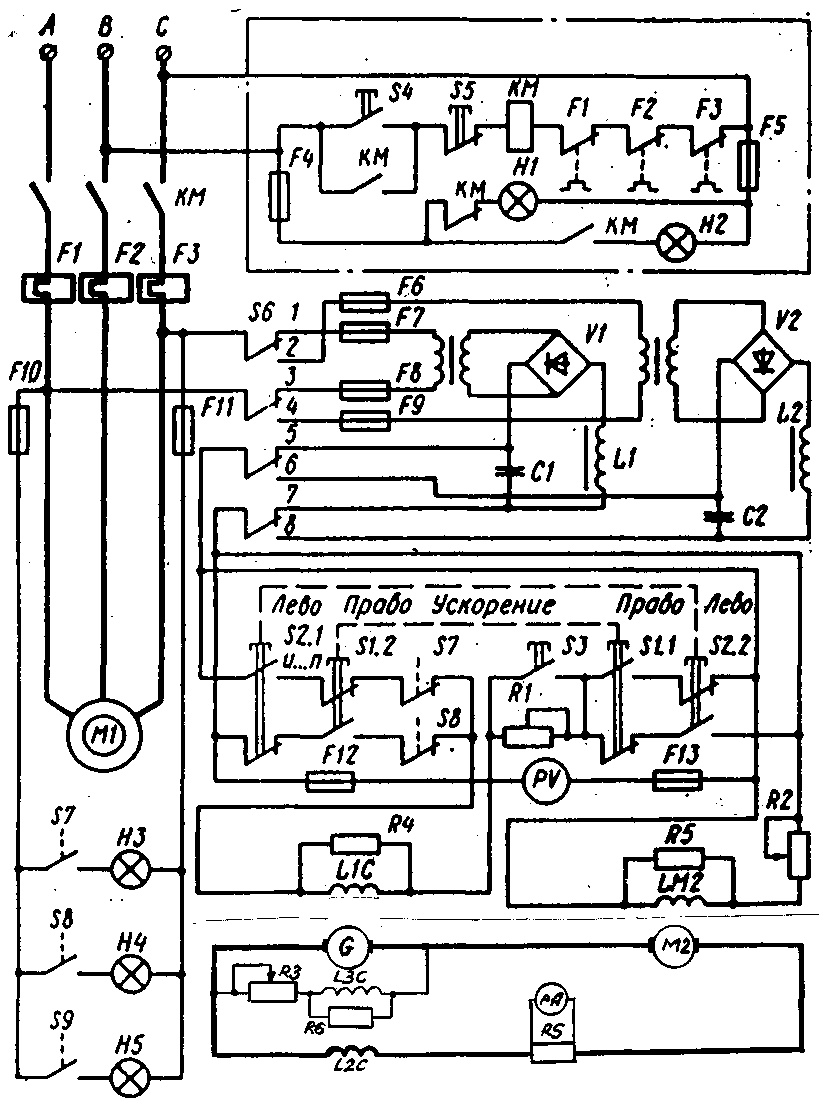
Рис. 10.25. Схема простого управления РЭП судов типа «Волго-Балт»
Силовая часть схемы
В данной схеме применена система генератор-двигатель, включающая в себя:
приводной асинхронный двигатель с короткозамкнутым ротором М1;
генератор постоянного тока смешанного возбуждения G;
двигатель постоянного тока независимого возбуждения М2.
Генератор G имеет на главных полюсах 3 обмотки:
независимую НОГ - L1C;
последовательную ( противокомпаундную ) ПКО - L2C.
параллельную ПрОВ - L3C;
Двигатель М2 имеет на главных полюсах независимую обмотку LM2.
Обмотки якорей генератора и двигателя соединены последовательно.
Магнитные потоки независимой НОГ и ПрОВ параллельной обмоток генератора G
направлены согласно и намагничивают генератор. Последовательная обмотка L2C включе
на с переброшенными выводами, поэтому её магнитный поток направлен встречно магнит
ным потокам параллельной и независимой обмоток, т.е. эта обмотка размагничивает гене-
ратор.
Таким образом, результирующий магнитный поток генератора
Ф рез = ( Ф ног + Ф пров ) - Ф пко.
Такое включение обмоток генератора G позволяет получить его крутопадающую внешнюю характеристику ( рис. 10.24, а ).
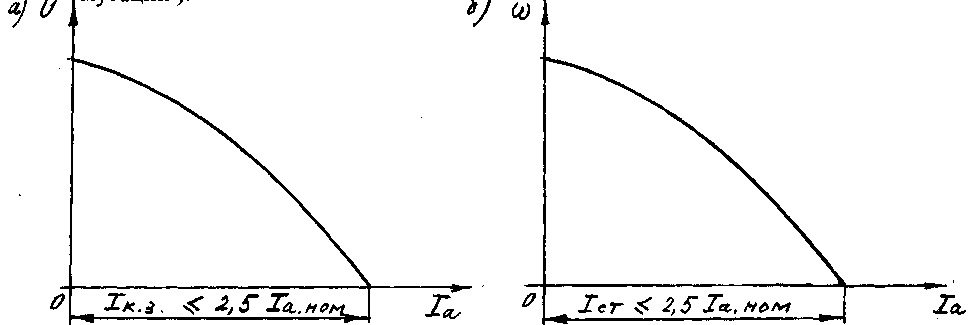
Рис. 10.26. Внешняя характеристика генератора G с ПКО ( а ); механическая характеристика исполнительного двигателя М2 ( б )
Напряжение генератора передаётся на обмотку якоря исполнительного электродви-
гателя М2, поэтому механическая характеристика двигателя ( рис. 10.24, б ) повторяет внешнюю характеристику генератора.
Как
следует из графиков внешней и механической
характеристик, описанное выше включение
обмоток возбуждения генератора позволяет
ограничить ток стоянки двигателя I
 ( например, при заклинивании пера руля
) и равный ему ток короткого замыкания
генератораI
( например, при заклинивании пера руля
) и равный ему ток короткого замыкания
генератораI до безопасных значений ( обычно ток
стоянки I
до безопасных значений ( обычно ток
стоянки I
 ≤
2,5I
≤
2,5I по
услови-
по
услови-
ям коммутации ).
Для питания независимых обмоток генератора L1C и двигателя LМ2 используются 2 одинаковых трансформаторно-выпрямительных блока ( ТВБ ).
Каждый блок состоит из понижающего трансформатора Т1 ( Т2 ) и выпрямитель-
ного мостика V1 ( V2 ). При работе схемы один из блоков – рабочий, второй – резервный.
Для переключения блоков служит 4-полюсный переключатель S6. На схеме контак
ты переключателя 1…8 находятся в положении «В работе левый ТВБ, в резерве правый ТВБ .
Параллельно обмоткам возбуждения L1С, L3С и LМ2 включены разрядные резис-
торы соответственно R4, R6 и R5 , предназначенные для уменьшения перенапряжений на этих обмотках при их отключении. Эти перенапряжения возникают на обмотках под дей-ствием ЭДС самоиндукции при снятии питания с обмоток ( отключении обмоток ).
Последовательно с обмотками L3С и LМ2 включены регулировочные резисторы соответственно R3 и R2, предназначенные для получения необходимого значения токов возбуждения генератора ( резистор R3 ) и двигателя ( R2 ).
Ползунки этих резисторов перемещают только при настройке рулевого привода.