

46
2.Записать в протокол номинальные параметры исследуемого трансфор-
матора.
3.Собрать на испытательном стенде электрическую цепь (см. рис.2.1). Внимание! Перед началом каждого опыта движок автотрансформатора
T1 должен стоять в нулевом положении.
4. Выполнить опыт холостого хода трансформатора. Для этого: а) отключить Rн;
б) установить с помощью автотрансформатора номинальное напряжение U1ном (по вольтметру pV1 комплекта К-505);
в) занести в таблицу 2.4 показания приборов.
5. Выполнить опыт короткого замыкания трансформатора. Для этого:
а) движок автотрансформатора T1 установить в нулевое положение, сопротивление нагрузки Rн сделать равным нулю;
б) автотрансформатором T1 плавно увеличивать напряжение U1 до тех
пор, пока ток I1 не будет равен I1ном ;
в) занести в таблицу 2.4 показания приборов. Внимание! В опыте короткого замыкания U1<U1ном.
6. Выполнить опыт с различной нагрузкой трансформатора. Поддерживая U1 = U1ном изменять сопротивление нагрузки Rн таким образом, чтобы ток I1
изменялся от 0 до 1,2 I1ном с шагом 0,2 I1ном . Показания приборов занести в таблицу 2.4.
7. По экспериментальным данным рассчитать коэффициент трансформации по напряжению KU и коэффициента трансформации по току Ki , значени-
ем мощности P2 , КПД η , коэффициент мощности cosϕ1 и процентное изменения напряжения трансформатора U2 .
8. Построить зависимости U2 (I2 ), cosϕ1 (I2 ), η (I2 ) и U2 (I2 ).
9.Из опытных данных определить потери в магнитопроводе трансформатора и его обмотках.
10.Изобразить Т-образную сему замещения и векторную диаграмму приведенного однофазного трансформатора.
§ 2.6. Компьютерное моделирование по заданию Модуля 5
Содержание компьютерного эксперимента:
Компьютерное моделирование позволяет качественно получить внешнюю характеристику трансформатора в зависимости от характера нагрузки. Виртуальная схема содержит источник переменной ЭДС, исследуемый трансформатор, комплексную нагрузку, измерительные приборы. Схема соединения элементов изображена на рис.2.2.
47
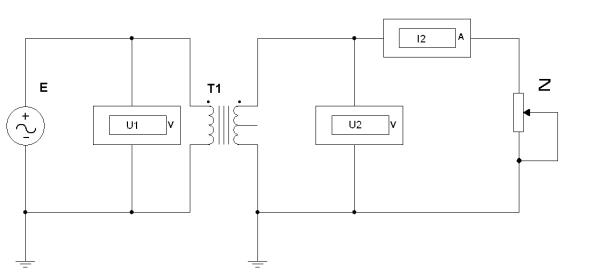 Рис. 2.2. Схема к компьютерному моделированию.
Рис. 2.2. Схема к компьютерному моделированию.
Исходные данные к моделированию указаны в таблице 2.4: первая цифра варианта соответствует типу трансформатора, вторая цифра – величине сдвига фаз ϕ , третья – амплитудному значению ЭДС.
Выполнение компьютерного моделирования:
7. Элементы в электронных библиотеках, используемые в моделировании:
библиотека Sources – источник переменной ЭДС  ;
;
библиотека Basic – резистор  , конденсатор
, конденсатор  , индуктивность
, индуктивность
 , в зависимости от характера нагрузки.
, в зависимости от характера нагрузки.
библиотека Basic – исследуемый трансформатор  , тип которого
, тип которого
задан.
библиотека Indicators – измерительные приборы: вольтметры  ,
,
амперметры  .
.
8.Собрать виртуальную электрическую схему согласно рисунку 2.2, используя заданный тип трансформатора.
9.Выставить величину источника переменной ЭДС Em , согласно ва-
рианту (таблица 2.4), частотой f = 50 Гц.
10.Вынести компонент «заземление»  из библиотеки Sources и заземлить точку схемы.
из библиотеки Sources и заземлить точку схемы.
11.Отключить нагрузку от вторичной обмотки трансформатора и зафиксировать показания приборов в режиме холостого хода.
12.При заданных, согласно варианту, величинах реактивного элемента
L и C (таблица 2.6, 2.7.), рассчитать значения сопротивления R, при которых величина ϕ ,D (таблица 2.5) останется неизменной.

|
|
|
|
|
|
|
|
|
48 |
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.5. |
|
|
№ |
|
Тип тр-ра |
|
|
ϕ |
|
,D |
|
E , В |
|
|
|
|
|
|
|
|
|||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
TS_PQ4_10 |
|
85 |
|
300 |
|
|||
|
2 |
|
TS_PQ4_12 |
|
75 |
|
150 |
|
|||
|
3 |
|
TS_PQ4_16 |
|
90 |
|
100 |
|
|||
|
4 |
|
TS_PQ4_20 |
|
80 |
|
250 |
|
|||
|
5 |
|
TS_PQ4_24 |
|
70 |
|
200 |
|
|||
К выходу вторичной обмотки трансформатора подключить активноёмкостную нагрузку. Задаваясь величинами резистора и конденсатора из таблицы 2.6, снять внешнюю характеристику.
Таблица 2.6.
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
|
|
|
|
|
С, мкФ |
20 |
0 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
|
|
|
|
|
|
|
|
|
|
|
R, Ом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2, В |
|
|
|
|
|
|
|
|
|
|
I2, A |
|
|
|
|
|
|
|
|
|
|
К выходу вторичной обмотки трансформатора подключить активноиндуктивную нагрузку. Задаваясь величинами резистора и индуктивности из таблицы 2.7, снять внешнюю характеристику трансформатора.
Таблица 2.7.
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
|
|
|
|
|
мГн |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
400 |
450 |
500 |
|
|
|
|
|
|
|
|
|
|
|
R, Ом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2, В |
|
|
|
|
|
|
|
|
|
|
I2, A |
|
|
|
|
|
|
|
|
|
|
Построить внешние характеристики трансформатора при различных типах нагрузки. Проанализировать результаты моделирования и сделать выводы

49
§2.7. Краткая теория и примеры
1.ТРАНСФОРМАТОРЫ
Устройство и принцип действия
Трансформатором называется электромагнитный статический (т.е. без движущихся частей) аппарат, предназначенный для преобразования электрической энергии синусоидального тока одного напряжения в другое напряжение той же частоты.
Трансформатор имеет не менее двух обмоток, электрически изолированных друг от друга, связанных между собой посредством общего магнитного потока. Работа трансформатора основывается на явлении взаимной индукции (принцип электромагнитного взаимодействия обмоток). Для усиления магнитной связи обмотки трансформатора размещаются на сердечнике, собранном из листовой электротехнической стали.
Электромагнитная схема трансформатора представлена на рис.2.3.
|
Ф = Ф1 − Ф2 |
|
|
|
|
i1 |
i2 |
|
|
u1 |
w1 |
w2 |
|
|
e1 |
e2 |
u2 |
Rн |
|
Рис.2.3. Электромагнитная схема идеализированного трансформатора.
На замкнутом ферромагнитном сердечнике расположены две обмотки. К одной из них – первичной – подводится энергия от источника питания. От другой – вторичной обмотки – энергия отводится к приемнику. Все величины (ЭДС, напряжение, ток, число витков), относящиеся к обмоткам, называют соответственно первичными и вторичными. Буквенные значения этих величин снабжаются индексами 1 и 2 соответственно.
Под действием подаваемого синусоидального напряжения U1 в первичной обмотке трансформатора возникает ток i1 и МДС F = i1 w1 возбуждает в сердечнике синусоидальный магнитный поток Ф1 . Этот поток, замыкаясь по сердечнику, пронизывает витки обеих обмоток и индуктирует в них ЭДС e1 и e2 . По второму закону Кирхгофа e1 уравновешивает u1 , e2 создает u2 на вы-
ходных зажимах трансформатора. При замыкании вторичной цепи возникает ток i2 , который образует собственный магнитный поток Ф2 , направленный, со-
50
гласно правилу Ленца, встречно магнитному потоку Ф1 и стремится его
уменьшить. В результате в сердечнике создается общий магнитный поток Ф = Ф1 − Ф2 , сцепленный с обеими обмотками и определяющий в них результи-
рующие ЭДС e1 = −w1 ddtФ и e2 = −w2 ddtФ .
Поскольку U1 ≈ E1 , то при неизменном значении U1 ЭДС E1 тоже постоянна. Т.к. E1 зависит от потока ( E1 ≈ 4,44 w1 Фm ), то и магнитный поток при
любой нагрузке можно считать постоянным.
Чтобы результирующий магнитный поток оставался неизменным, магнитный поток вторичной обмотки Ф2 должен быть уравновешен магнитным
потоком первичной обмотки Ф1 . Поэтому при увеличении нагрузки I2 увеличивается ток I1 .
Идеализированный трансформатор
Допустим, что активные сопротивления обмоток трансформатора равны нулю и потокосцепления рассеяния в них отсутствуют. Такой трансформатор называют идеализированным. Принципиальная схема идеализированного однофазного трансформатора приведена на рис.2.3.
Уравнения электрического состояния идеализированного трансформато-
ра:
u1 = −e1,
u2 = −e2,
где e1 = −w1 ddtФ , e2 = −w2 ddtФ .
Из этих уравнений получаем соотношение:
u1 |
= |
e1 |
= |
w1 |
, |
|
|
e |
w |
||||
u |
2 |
|
|
|
||
|
2 |
2 |
|
|||
которое указывает на важнейшее свойство трансформатора преобразовывать (понижать или повышать) напряжение без искажения формы.
В идеализированном трансформаторе мощность, потребляемую от сети можно считать равной мощности, отдаваемой в нагрузку:
U1I1 = U2I2 .
Тогда
I2 = U1 = w1 = k , I1 U2 w2
где k - коэффициент трансформации.
При разомкнутой вторичной обмотке идеализированный трансформатор превращается в идеализированную катушку с магнитопроводом (см. Модуль 4).
Схема замещения нагруженного идеализированного однофазного трансформатора приведена на рис.2.4
51
I1 |
I |
|
1 |
Rп |
|
|
|
|
|
U1 |
Zн |
U1 |
gп |
bμ |
Zн |
jXμ |
|
|
|
|
|
а) |
|
|
|
б) |
|
Рис.2.4. Схемы замещения нагруженного идеализированного однофазного трансформатора
Реальный трансформатор
В реальных трансформаторах учитывается магнитное поле рассеяния и активное сопротивление обмоток. Электромагнитная схема реального трансформатора приведена на рис.2.5.
i1 |
L1рас |
R1 |
|
u1 |
e1 |
i2 |
R2 |
|
L2рас |
|
|
e2 |
u2 |
Zн |
Рис.2.5. Электромагнитная схема реального трансформатора.
Уравнения электрического состояния реального трансформатора, составленные по второму закону Кирхгофа:
u |
|
= −e |
+ R i + L |
di1 ; |
|
|
|
|
|
1 |
1 |
1 1 |
1рас dt |
|
|
|
|
||
u |
|
= −e |
− R i |
− L |
di2 |
, |
|
|
|
|
2 |
2 |
2 2 |
2 рас dt |
|
|
|
|
|
где L |
di1 = −e |
, L |
|
di2 |
= −e |
- ЭДС от потокосцепления рассеяния; |
|||
|
dt |
||||||||
|
|
1рас dt |
1σ |
2 рас |
|
2σ |
|
||
R1i1 , R2i2 - падения напряжения на сопротивлениях обмоток.
Трансформаторы проектируют так, чтобы рассеяние было много меньше рабочего потока Ф, сопротивление обмоток тоже невелико, поэтому можно приближенно считать, что в реальном трансформаторе
U1 ≈ E1 = 4,44 f w1 Фm .
52
Потери в трансформаторе
В трансформаторах различают два вида потерь активной мощности:
P = Pм + Pст,
где Pм - потери в меди (в обмотках);
Pст - потери в стали (магнитопроводе), которые включают в себя по-
тери на гистерезис и потери на вихревые токи. Потери в меди Pм = I12 R1 + I22 R2 .
Мощность потерь на гистерезис в технических задачах определяют по формуле
Pг = σ г f Bmn G ,
где σ г - гистерезисный коэффициент, значение которого зависит от мар-
ки электротехнической стали;
f - частота приложенного напряжения, Гц;
G - масса магнитопровода, кг;
Bm - амплитуда магнитной индукции, Тл;
n - показатель степени ( n = 1,6 при Bm <1Тл, n = 2 при Bm >1Тл).
Мощность потерь на вихревые токи выражается формулой:
Pв = σ в f 2 γ G Bm2 ,
где σ в - коэффициент вихревых токов, зависящий от марки электротех-
нической стали и конструкции магнитопровода; f - частота, Гц;
G- масса магнитопровода, кг;
γ- удельная проводимость материала;
Bm - амплитуда магнитной индукции, Тл.
Потери в обмотках трансформатора определяются из опыта короткого замыкания, потери в магнитопроводе – из опыта холостого хода.
Режимы работы трансформатора
К основным режимам работы трансформатора относятся: холостой ход, опыт короткого замыкания и режим нагрузки. Каждому режиму соответствуют схемы замещения, которые позволяют рассчитать параметры трансформатора (коэффициент трансформации, коэффициент нагрузки, КПД, потери).
Исследование нагрузочного режима трансформатора производится на основе векторных диаграмм, построенных для приведенного трансформатора у которого параметры вторичной обмотки приведены к напряжению U1 и числу
витков w1 первичной обмотки. Соответственно, приведенный трансформатор
имеет коэффициент трансформации k =1.
При замене реального трансформатора приведенным активные, реактивные, полные мощности и коэффициент мощности вторичной обмотки транс-
53
форматора считаются неизменными. |
|
|
|
|
|
|
|
|||||
Для приведенного трансформатора: |
|
|
|
|
|
|
||||||
E ′ = k E ; |
U ′ = k U |
2 |
; |
I ′ = 1 |
I |
2 |
; R ′ = k2 |
R ; |
||||
2 |
1 |
2 |
|
2 |
k |
|
|
|
2 |
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
x ′ = k2 |
x ; |
z ′ = k2 z |
2 |
; |
z |
′ = k2 |
z |
н |
, |
|
||
2 |
2 |
2 |
|
н |
|
|
|
|
|
|||
k - коэффициент трансформации реального трансформатора.
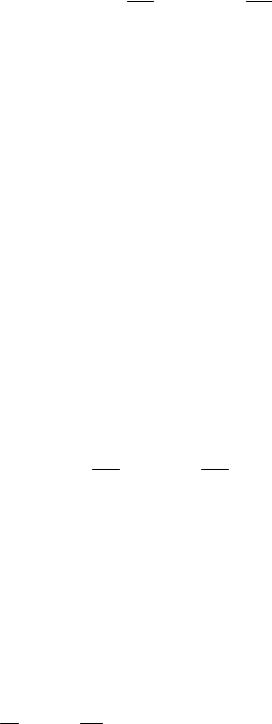
Схема замещения приведенного трансформатора приведена на рис.2.6.а), векторная диаграмма, соответствующая схеме замещения – на рис.2.6,б).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
1 |
|
jX1 |
I1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−R I ′ |
|
|
|
R1 |
I1 |
|
|
|
|
|||||
|
I |
R1 Х1рас |
|
|
|
|
|
I ′ R2′ |
|
′ |
2 |
2 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
X2 рас |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
|
|
|
2 |
|
|
|
|
|
− jX ′ |
I ′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
I0 |
|
|
|
|
2 |
2 |
|
|
U′ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
U |
1 |
|
|
|
|
|
|
|
|
Rп |
|
|
|
|
-Е1=-E′2 |
|
|
2 |
|
I2 |
|
I1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
E1 = E2′ |
|
|
|
|
|
Хμ |
|
U2′ |
|
Zн |
|
|
|
|
|
|
|
|
α |
I0 |
|
Ф |
m |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
б) |
|
|
|
|
||||||||||||
Рис.2.6. Схема замещения и векторная диаграмма приведенного трансформатора.
При опыте холостого хода к первичной обмотке трансформатора подводится номинальное напряжение U1ном , ток в первичной обмотке I0 составляет
4 − 10% от I1ном . Уравнение электрического равновесия в комплексной форме:
E1 = U1 − z1I0 ; E2 = U2 .
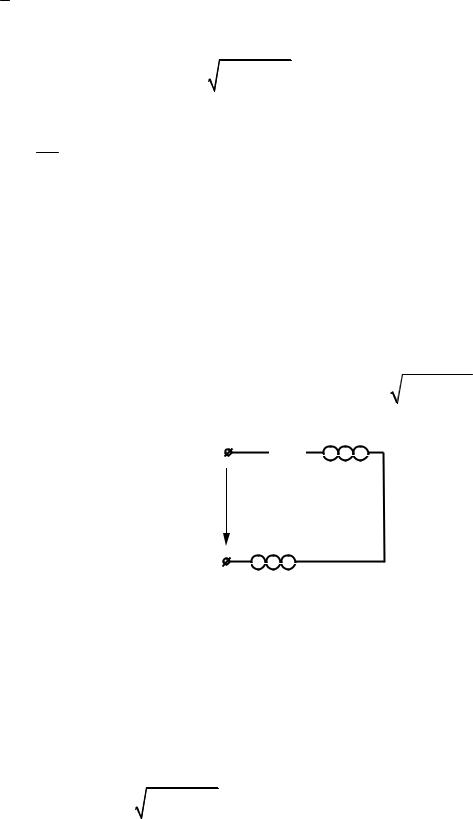
Схема замещения трансформатора при холостом ходе приведена на рис.2.7.
I0 |
R |
1 |
Х1рас |
|
|
||
U1ном |
|
|
Rп |
|
|
Хμ |
|
|
|
|
Рис.2.7.Схема замещения трансформатора при холостом ходе.
Пренебрегая падением напряжения на первичной обмотке трансформато-
54
ра Z1I0 можно считать, что мощность, потребляемая трансформатором в режиме холостого хода, расходуется в основном на потери в стали Pxx = Pст.
Параметры схемы замещения определяются по формулам:
z |
|
= U1н ; R |
= |
Pxx |
; x = z |
2 |
− R 2 . |
|
|
I 20 |
|
||||||
|
μ |
I0 |
п |
|
μ |
μ |
п |
|
Коэффициент трансформации находится как отношение:
k = E1 ≈ U1 . E2 U2
При опыте короткого замыкания к первичной обмотке трансформатора подводится напряжение U1k = 5 − 10% U1ном . При этом напряжении магнитный
поток, определяемый из уравнения U1k ≈ E1k = 4,44 fw1Фm , а, следовательно, и магнитная индукция Bm трансформатора малы. Поэтому потерями в магнито-
проводе можно пренебречь и считать, что вся мощность, потребляемая трансформатором, идет на нагрев его обмоток, т.е. P = Pм .
При опыте короткого замыкания определяют параметры упрощенной схемы замещения (рис.2.8):
|
U |
|
|
P |
|
|
|
|
|
|
|
|
2 |
2 |
|||
z1k = |
1k |
′ |
= |
k |
|
, Xk |
|
|
|
|
′ |
= zk |
− Rk . |
||||
|
|
|
|
|
|
||||||||||||
I1ном |
, Rk = R1 + R2 |
I 2ном |
|
= X1 + X2 |
|||||||||||||
|
|
|
|
|
R1 |
|
|
|
Х1рас |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
U |
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
X ′ |
|
|
|
R′ |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
2 рас |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2.8. Схема замещения трансформатора при К.З.
Таким образом определить параметры Т-образной схемы замещения трансформатора (рис.2.7,а) можно с помощью данных, полученных из опытов х.х. и к.з.
Сопротивление намагничивающей цепи:
zμ = U1xx . I1xx
Активное и индуктивное сопротивления намагничивающей цепи:
R = |
P1xx |
, x = z |
2 |
− R 2 . |
|
I 2 |
μ |
||||
п |
μ |
п |
|||
|
1 xx |
|
|
|
Полное сопротивление короткого замыкания:
zк = U1кз . I1кз
Активное и индуктивное сопротивление короткого замыкания:
55
R |
= |
P1кз |
|
|
, х = z |
2 − R 2 . |
|
|
|||||||
|
|
|
|
|
|||||||||||
кз |
|
I |
2 |
|
|
|
кз |
|
|
к |
к |
|
|
||
|
|
1 кз |
|
|
|
|
|
|
|
|
|
||||
Сопротивления первичной обмотки трансформатора: |
|||||||||||||||
|
|
′ |
|
|
Rкз |
|
|
|
|
|
′ |
|
xкз |
|
|
R1 = R2 |
= |
|
|
|
|
|
|
|
|
рас = |
|
|
|||
|
|
|
, |
|
|
|
, |
||||||||
2 |
x1рас = x2 |
2 |
|||||||||||||
|
′ |
|
|
|
|
|
|
|
|
|
|||||
где |
и |
|
|
′ |
|
|
- приведенные сопротивления вторичной обмотки. |
||||||||
R2 |
x2 рас |
||||||||||||||
Сопротивления вторичной обмотки трансформатора |
|||||||||||||||
|
|
′ |
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
||
R |
= R2 , |
x |
|
|
= |
2 рас |
, |
|
|
|
|||||
|
|
|
|
|
|
||||||||||
2 |
k2 |
|
|
2 рас |
|
k2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
где k = U1хх - коэффициент трансформации.
U2xx
Нагрузочные характеристики трансформатора
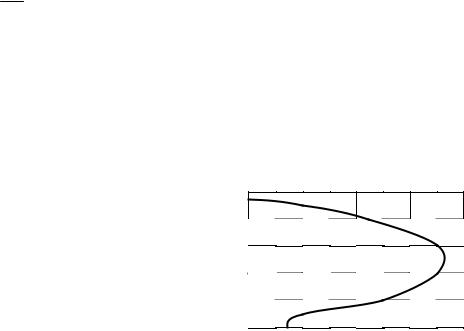
Нагрузочные характеристики трансформатора – это зависимости вторичного напряжения U2 , коэффициента мощности cosϕ1 и коэффициента полезно-
го действия η от тока нагрузки I2 при cosϕ2 = const .
Зависимость U2 (I2 ) называется внешней характеристикой трансформато-
ра.
На основании второго закона Кирхгофа для вторичной цепи уравнение
внешней характеристики записывается в виде: |
|
||||||
U |
2 = E2 − (R2 + jX2 ) |
I2 . |
|
||||
|
|
|
|||||
Внешняя характеристика трансформатора при различных характерах на- |
|||||||
грузки представлена на рис.2.9. |
|
||||||
|
|
|
U2 |
|
|||
|
|
|
cos φ2 при φ2 <0 |
|
|||
|
|
|
|
cosϕ2 = 1 |
|||
|
|
|
cos φ2 при φ2 > 0 |
|
|||
|
|
|
|
|
|
I2 |
|
|
|
Рис.2.9. Внешние характеристики трансформатора. |
|||||
Коэффициент полезного действия η = |
P2 |
|
зависит от режима работы |
||||
P |
|||||||
|
|
|
|
|
|||
1 |
|
|
|||||
трансформатора и может определяться методом косвенного измерения, основанного на прямом измерении потерь в трансформаторе:
η = |
|
|
|
Kз P2 |
|
, |
|
K |
з |
P |
+ P |
+ K |
2 P |
||
|
|
2 |
0xx |
з |
кз |
||
56
где Кз = |
|
I2 |
= |
I1 |
- коэффициент загрузки. |
|
I |
2ном |
I |
||||
|
|
|
||||
|
|
|
1ном |
|
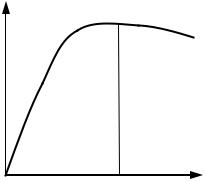
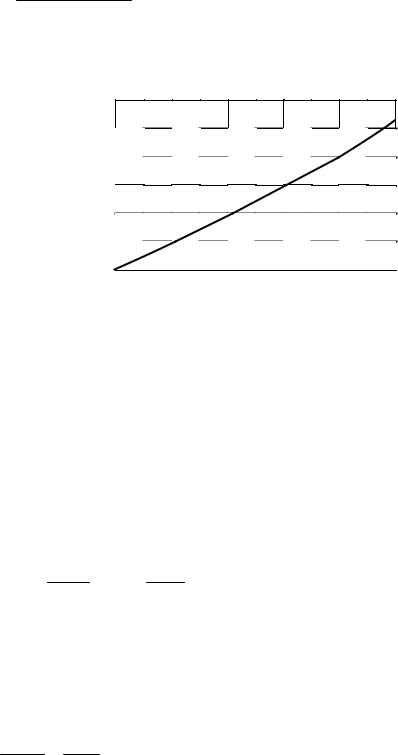
Вид характеристики η (I2 ) представлен на рис.2.10.
η
I2
I2ном
Рис.2.10. КПД трансформатора при различной величине нагрузки.
В режиме холостого хода η = 0 . При малых значениях нагрузки, когда потери в обмотках не велики, а потери в магнитопроводе соизмеримы с полезной мощностью P2 , значение КПД не большое. С увеличением тока нагрузки
КПД трансформатора растет и достигает наибольшего значения при равенстве потерь в обмотках и потерь в магнитопроводе ( Pкз = P0xx ). При увеличении на-
грузки сверх I2ном потери в обмотках много больше потерь в магнитопроводе и КПД незначительно снижается.
Пример. В однофазном трансформаторе используется магнитопровод с активным сечением 20 см2, работающий в номинальном режиме с магнитной индукцией B = 1,2 Тл. Число витков первичной и вторичной обмоток w1 = 400 и
w2 = 50 , частота переменного напряжения сети 50 Гц. Определить ЭДС одного витка трансформатора, ЭДС первичной и вторичной обмоток, а также коэффи-
циент трансформации. |
|
|
|
||
Решение. |
Максимальный магнитный поток одинаково для обеих обмо- |
||||
ток и равно E |
= 4,44 f Ф = 4,44 50 2,4 10−3 = 0,53 В. ЭДС обмоток про- |
||||
0 |
m |
|
|
|
|
порциональны числу их витков, т.е. E1 = w1E0 = 212 В и E2 = w2E0 = 26,5 В. |
|||||
Коэффициент трансформации равен n = |
w1 |
= |
E1 |
= 8 . |
|
w |
|
||||
|
|
|
E |
||
|
2 |
2 |
|
||
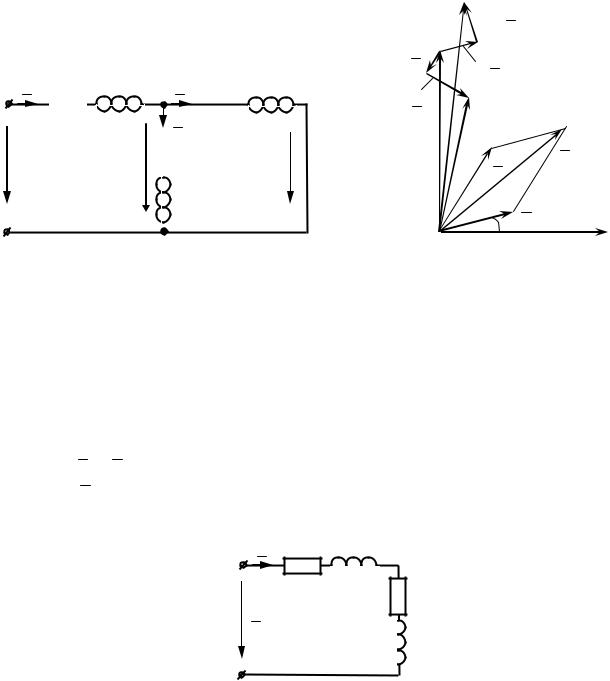
Пример. Показания амперметра и вольтметра при опыте короткого замыкания составляют U1 =190 В, I1 = 5 А, мощность потерь в меди равна 400 Вт.
Определить параметры схемы замещения трансформатора (см. рис.2.11), если n = 4, а активное и реактивное сопротивления первичной обмотки R1 = 2 Ом и
X1 =15,7 Ом. Найти коэффициент мощности трансформатора.

57
R1 X1
|
|
|
|
|
|
|
|
I1н |
|
|
|
|
|
|
|
|
|
Uk R n2 |
|
|
|
|
||||
X |
2 |
n2 |
|
|||||
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2.11 Схема замещения трансформатора.
Решение. Активное сопротивление короткого замыкания
Pк = Pкз = 400 = 16 (Ом),
I1ном 52
полное сопротивление z = U1ном = 190 = 38 (Ом).
I1ном 5
Следовательно, реактивное сопротивление короткого замыкания
Xк = zк2 − Rк2 = 34,5 (Ом).
Приведенные к первичной обмотке активное и индуктивное сопротивления вторичной обмотки
R2′ = Rк − R1 = 16 − 2 = 14 (Ом)
и
X2′ = Xк − X1 = 34,5 − 15,7 = 18,8 (Ом).
Активное и индуктивное сопротивления вторичной обмотки
R2 = Rn22′ = 1442 = 0,875 (Ом)
и
X2 = X2′ = 18,8 = 1,18 (Ом).
n2 42
Коэффициент мощности трансформатора в режиме короткого замыкания cosϕ = 0,423 .
2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Электрические машины представляют собой электромеханические устройства, в которых происходят преобразования энергии. В генераторах механическая энергия преобразуется в электрическую, в двигателях – электрическая энергия в механическую. Каждая электрическая машина обладает свойством обратимости, т.е. может работать в качестве двигателя и генератора. По роду тока электрические машины подразделяются на машины переменного тока и машины постоянного тока.
58
Электрические машины постоянного тока
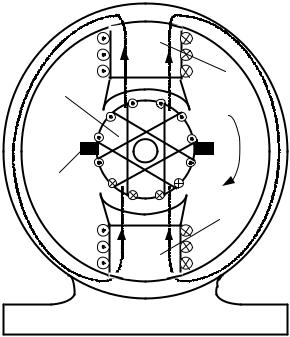
Электрическая машина постоянного тока (рис.2.12) состоит из неподвижной части – статора (1), подвижной части – якоря (2) и щеточно-коллекторного узла (3). В соответствии с законом электромагнитной индукции, при вращении якоря в магнитном поле полюсов в обмотке якоря наводятся переменные ЭДС, т.е. ЭДС индукции наводится в витках, движущихся в неподвижном магнитном поле.
Статор является механическим остовом машины. Станина изготавливается из литой стали. На станине укрепляются основные магнитные полюса, которые служат для создания магнитного потока, и вспомогательные - для улучшения коммутации в машине.
Главный полюс состоит из сердечника, укрепленного на станине болтами, и обмотки возбуждения, т. е. представляет собой электромагнит. Сердечник полюса изготавливается из листовой стали и на свободном конце снабжается полюсным наконечником, для создания требуемого распределения магнитного поля в воздушном зазоре машины.
Электромагниты (полюсы) создают в машине постоянное по величине и неподвижное в пространстве магнитное поле.
Путь магнитных линий в генераторе постоянного тока показан на рис.2.12. Верхний полюс является южным, нижний - северным. Показанная магнитная система имеет одну пару полюсов.
|
Существуют и более сложные |
||
|
магнитные системы, |
содержащие |
|
S |
два северных и два южных полюса. |
||
В этом случае направление токов в |
|||
1 |
обмотках возбуждения выбирается с |
||
2 |
таким расчетом, чтобы соседние по- |
||
|
люсы были разноименными, т.е. |
||
n |
чтобы рядом с северным находился |
||
южный полюс и т.д. |
Такая магнит- |
||
|
|||
3 |
ная система имеет две пары полю- |
||
1 |
сов. Существуют машины и с боль- |
||
шим числом полюсов, но их число |
|||
N |
будет непременно четным. |
||
В современных электрических |
|||
|
|||
|
машинах малой мощности возбуж- |
||
|
дение осуществляется постоянными |
||
|
магнитами. При этом габариты ма- |
||
Рис. 2.12. Машина постоянного тока |
шины уменьшаются, |
исключаются |
|
|
потери на нагрев обмотки возбуж- |
||
дения и возрастает КПД. Электрические машины с постоянными магнитами более технологичны, их производство легко автоматизировать.
59
Якорь машины постоянного тока представляет собой стальной зубчатый сердечник, в пазах которого расположены витки обмотки. Эти витки соединены между собой последовательно и образуют замкнутую цепь.
При вращении якоря магнитный потокосцепление будет меняться. В результате в каждом из витков будет возникать переменная ЭДС. Во всех витках, расположенных по одну сторону нейтральной линии, ЭДС будут иметь один и тот же знак. Нулевое значение напряжения будет наступать в одном и том же месте, а именно, на нейтральной линии, расположенной симметрично относительно северного и южного полюсов.
Обмотка якоря является замкнутым контуром, но тока в нем не возникает, т. к. сумма мгновенных значений ЭДС всех последовательно соединенных витков обмотки равна нулю (машина симметрична). Если на геометрическую нейтраль установить неподвижные щетки и создать скользящий контакт между щетками и обмоткой, то обмотка будет представлять собой две параллельные ветви, в каждой из которой будут проводники с одинаково направленными ЭДС. Иначе говоря, получаем два параллельных источника ЭДС, состоящих из группы проводников, в каждый момент времени оказывающихся под южным и северным полюсом соответственно. При этом в каждой из обмоток индуктируется переменная ЭДС, а напряжение на зажимах машины постоянно. Если обмотку якоря через щетки замкнуть на сопротивление нагрузки, то в цепи возникнет ток, складывающийся из токов ветвей.
Осуществление скользящего контакта между щетками и обмоткой якоря возможно при удалении изоляции на узкой полосе наружной поверхности обмотки, когда щетки касаются оголенных проводов. В действительности же (в современных конструкциях) щетки касаются медных клинообразных пластин, собранных в цилиндр – коллектор, установленный на валу машины. Пластины коллектора изолированы друг от друга и от вала и соединяются с обмоткой якоря проводниками. Отвод тока от коллектора осуществляется гибким кабелем через щетки, установленные в щеткодержателях.
Электрическая машина постоянного тока, как и другие машины, представляют собой два электромагнитно связанных контура, причем намагничивающая сила (НС) одного из этих контуров поддерживает основное магнитное поле. Этим контуром в машине постоянного тока является обмотка возбуждения машины, а вторичным контуром - обмотка якоря. Пока во вторичном контуре нет тока, этот контур не оказывает влияния на магнитное поле, создаваемое первичным контуром. Но как только в якоре появляется ток, то в магнитной цепи машины возникает дополнительная НС, искажающая и магнитный поток машины. Это явление получило название реакции якоря. Из-за реакции якоря происходит снижение ЭДС машины, некоторое снижение главного магнитного потока, а также ухудшаются условия коммутации машины. Для компенсации реакции якоря между основными полюсами устанавливают дополнительные полюсы, токи обмоток которых создают магнитный поток, противоположный магнитному потоку якоря. Обмотки дополнительных полюсов последовательно соединяют с обмоткой якоря, с тем, чтобы с увеличением тока якоря увеличивалось их компенсирующее действие.

60
Потери мощности в электрических машинах невелики и составляет 5 - 15% преобразуемой мощности. В целях увеличения магнитного потока и уменьшения потерь на перемагничивание, при изготовлении машин используют специальные сорта стали. Машины постоянного тока изготавливаются на мощности от долей ватт до 12 МВт. Номинальное напряжение их не превышает 1500 В. Частота вращения машин колеблется в широких пределах - от нескольких оборотов до нескольких тысяч оборотов в минуту.
Все электрические машины постоянного тока обратимы: могут работать в режимах генератора и электродвигателя. Цепь возбуждения и цепь якоря в машинах постоянного тока по отношению к сети могут быть включены различными способами.
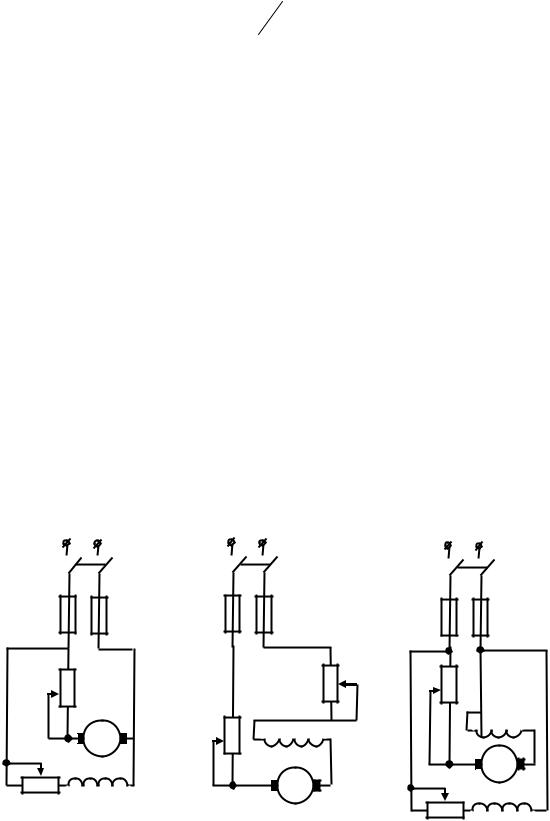
По способу возбуждения генераторы постоянного тока подразделяют на генераторы с независимым возбуждением и на генераторы с самовозбуждением. У генераторов с независимым возбуждением, например, рис.2.13,а) цепь возбуждения питается от независимого постороннего источника, которым может служить другая машина постоянного тока или аккумулятор. У генераторов с самовозбуждением цепь возбуждения питается непосредственно от самого генератора. Генераторы постоянного тока с самовозбуждением делятся в свою очередь на генераторы с параллельным возбуждением, генераторы с последовательным возбуждением и генераторы со смешанным возбуждением. Для регулирования ЭДС машины достаточно менять ток в цепи возбуждения с помощью регулировочного реостата, который включается последовательно с обмоткой возбуждения.
У генераторов с параллельным возбуждением рис.2.13,б) цепь возбуж-
дения подключается к щеткам якоря генератора параллельно внешней цепи:
Iя = Iн + Iв
где : Iя - ток якоря,
Iн - ток нагрузки,
Iв - ток возбуждения.
Угенераторов с последовательным возбуждением обмотка возбужде-
ния соединяется последовательно с цепью якоря и с цепью внешней нагрузки.
Угенераторов со смешанным возбуждением рис.2.13 в) имеются две обмотки возбуждения: одна включается параллельно, а другая последовательно
свнешней цепью.
ЭДС якоря машины постоянного тока пропорциональна скорости вращения якоря и магнитному потоку полюса машины:
E = CenΦ = 60pNa n Ф
где: Се - постоянная, зависящая от конструктивных данных машины,
n- частота вращения якоря,
Ф- результирующий магнитный поток,
р- число пар полюсов статора,
61
N - число активных проводников обмотки якоря, 2а - число пар параллельных ветвей обмотки.
Из этого выражения видно, от чего зависит в машине постоянного тока величина ЭДС и каким путем можно ее регулировать. В машине, работающей в режиме генератора, скорость вращения остается при работе постоянной, поэтому регулирование ЭДС генераторов осуществляется изменением магнитного потока путем изменения тока возбуждения. При работе машины в режиме двигателя скорость вращения изменяется при изменениях механической нагрузки. Кроме того, регулирование скорости вращения двигателей постоянного тока производится путем изменения тока возбуждения.
Rн |
Rн |
Rн |
ОВпосл
Я |
Я |
Я |
Rр ОВ |
ОВ |
ОВпар |
|
Rр |
Rр |
+-
а) |
б) |
в) |
Рис.2.13. Генераторы постоянного тока а – с независимым, б – с параллельным, в - со смешанным возбуждением.
В генераторах постоянного тока происходит преобразование механической мощности вращения ротора:
Р1 = 260π Мn = Mn 9,55
где:
М – вращающий момент на валу ротора с якорной обмоткой,
n- частота вращения ротора.
Вэлектрическую мощность:
Рэ = ЕI я

62
где:
Е - ЭДС якорной обмотки, Iя - ток в якорной обмотке.
В нагрузке, подключаемой к якорной обмотке через коллектор, выделяется мощность Р2 = UI
КПД генератора находится как:
η = |
Р2 |
100% |
= |
Р2 |
100% |
Р1 |
Р2 + ∑Р |
Где ∑ Р - суммарная мощность потерь. Напряжение на выводах генератора:
U = E − IяRя
где:
Rя - сопротивление цепи якоря, приведенное к рабочей температуре обмоток Т=+750С.
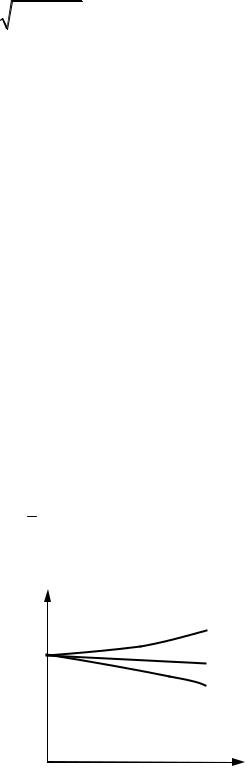
К основным характеристикам генераторов постоянного тока относятся: - характеристика холостого хода Е = f (Iв) - зависимость ЭДС генера-
тора от тока возбуждения при разомкнутой внешней цепи, т.е. при I=0, и при постоянстве скорости вращения машины n=соnst. Характеристика холостого хода дает представление о степени насыщения стали машины и имеет петлевой характер.
- внешняя характеристика U = f (I я) отражает изменение напряжения
на зажимах машины при изменении тока в цепи якоря (нагрузки) при n=соnst и Iв= соnst (для независимого возбуждения) или Rв = соnst (при самовозбужде-
нии). Для генераторов постоянного тока эту зависимость можно выразить как U = E − IяRя , где Rя сопротивление цепи якоря.
- регулировочная характеристика Iв = f (I я) , при U= соnst, n = соnst.
Она показывает, как надо изменять ток возбуждения, чтобы при изменении нагрузки напряжение на генераторе оставалось неизменным.
Все двигатели постоянного тока могут быть отнесены к группе машин постоянного тока с независимым возбуждением. Различают двигатели с параллельным параллельном и смешанным возбуждением. Пуск в ход двигателей при питании от источника постоянного напряжения осуществляется с помощью реостатаRn , включаемого в цепь якоря, при этом происходит ограничение пус-
кового тока до предельно допустимого.
В двигателях постоянного тока происходит преобразование электрической мощности в электромагнитнуюРэм = ЕIя, а затем в механическую мощ-
ность вращения якоря Р2 = Мn 9,55
63
Вращающий (электромагнитный) момент двигателя и частота вращения определяются выражениями:
М = |
рN |
I Ф = С I Ф |
n = Е |
СЕФ |
||
2π a |
||||||
|
я |
м я |
|
|||
где: См = 9,55СЕ
Независимо от способа возбуждения уравнение электрического состояния цепи якоря имеет следующий вид:
U = E + IяRя
Учитывая, что |
E = C nΦ = |
pN |
получим уравнение частотной характе- |
||||
|
|||||||
|
|
|
e |
60a |
|
|
|
ристики двигателя. |
|
|
|
|
|
||
|
|
|
|
|
|
||
I я= |
U − E |
= |
U − cnФ |
|
n = |
U − IяRя |
|
Rя |
Rя |
|
СЕФ |
||||
|
|
|
|
||||
К основным характеристикам двигателей относятся: рабочие М=f(Р2),
n=f(Р2), I=f(Р2), Р1=f(Р2) или Р1=f(Iя ) и механическая n=f(М) при U= соnst и
Iв= соnst.
Наиболее важные режимы работы двигателей: пуск в ход, регулирование частоты вращения, торможение и реверсирование.
Пуск в ход двигателей при питании от источника постоянного напряжения осуществляется с помощью реостата Rn, включаемого в цепь якоря (рис.2.14.). При этом происходит ограничение пускового тока до предельно допустимого значения.
+ |
- |
+ |
- |
+ |
- |
Rр |
Rп |
|
Rр |
Я |
Rп |
ОВ |
|
||
ОВ |
|
Я |
|
|
Rп |
|
|
ОВпосл |
|
Я |
Rр |
ОВпар |
а) |
б) |
в) |
Рис.2.14. Двигатели постоянного тока а – с параллельным, б – с последовательным, в – со смешанным возбуждением.
64
Частота вращения регулируется тремя способами: изменением напряжения цепи якоря, изменением тока возбуждения, т.е. Ф=f(Iв), введением добавочного сопротивления в цепь якоря.
Существует три способа торможения двигателей постоянного тока: рекуперативное (с возвратом энергии в сеть), динамическое, противовключение.
Пример. Для двигателя постоянного тока независимого возбуждения заданы следующие номинальные параметры: Рном = 130 кВт; Uном = 220 В;
т= 600 об/мин; η = 92%; Rя = 0,01 Ом; Cμ = 65 . Определить номинальный ток
якоря, ЭДС и вращающий момент двигателя, магнитный поток одного полюса и электромагнитную мощность.
Решение. Так как в паспорте на двигателе указывается номинальная ме-
ханическая мощностьP , то потребляемаяP |
= |
P2 |
= 141 кВт. Ток якоря находим |
|||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
η |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1н |
|
|
|
|
|
||||
(при параллельном возбуждении) из соотношенийIн |
= |
|
= 645 А. |
|||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||
ЭДС определяем по формуле |
|
|
|
|
|
Uн |
|
|
|
|
||||||||||||||||||||||||
U = E + Iя (Rя + Rp ); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
E = 220 − 645 0,01 = 213,5 В. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Электромагнитная мощность: Pэм = E Iя = 137 кВт. |
|
|
|
|
||||||||||||||||||||||||||||||
Вращающий |
|
момент |
|
|
|
двигателяM = CмIяФ, |
|
|
|
а |
|
магнитный по- |
||||||||||||||||||||||
токФ = |
E |
|
= 9,55 |
|
E |
. ОкончательноФ = 0,052 Вб иM = 2,2 кН м. |
||||||||||||||||||||||||||||
n CE |
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
nCм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Пример. Для двигателя параллельного возбуждения заданы следующие |
||||||||||||||||||||||||||||||||||
номинальные |
параметры:Uном = 110 В, Rяном = 0,012 Ом, nном = 600 об/мин, |
|||||||||||||||||||||||||||||||||
Iяном = 500 А. |
Определить вращающий момент двигателя при токеIя = 300 А и |
|||||||||||||||||||||||||||||||||
постоянном |
|
|
|
напряженииU = 100 В. |
Построить |
рабочую |
|
характеристику |
||||||||||||||||||||||||||
M = f (I ) |
в пределах от 0 до 1,5Iном . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Решение. Рабочую характеристику M = f (I ) |
можно рассчитать, по фор- |
|||||||||||||||||||||||||||||||||
мулеM |
= Cм |
Iя E |
|
= 9,55 |
Iя E |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
CE |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Частота вращения также зависит от тока якоря |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
n = n |
|
|
|
U − IяRя |
|
|
|
|
|
= n |
U − IяRя |
. |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
ном Uном − Iяном Rя |
|
|
|
ном |
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Окончательно получаем: |
9,55 (Uном − Iяном Rя )2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
9,55 E2 |
|
Iя |
|
|
|
|
|
|
|
|
|
Iя |
|
|
|
|||||||||||||||||
M = |
|
n |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||
|
|
E − I |
я |
R |
я |
|
|
|
n |
|
|
|
|
|
|
U − I |
я |
R |
|
|||||||||||||||
|
|
|
|
|
ном |
|
|
|
|
|
|
|
|
|
|
ном |
|
|
|
|
|
|
|
я |
||||||||||
Подставляем исходные данные, находим расчетное уравнение
|
|
|
|
|
|
|
|
|
|
|
|
|
|
65 |
|
|
|
|
|
Iя |
|
|
|
|
|
|
|
|
|
m = 168 100 − Iя 0,012 . |
|
|
|
|
|
|
|
|||||||
График зависимости M = f (Iя ) |
в диапазоне изменения тока от 0 до Iяном |
|||||||||||||
приведен на рисунке 2.15. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
M , Н м |
|
|
|
|
|
|
|
|||
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
60 |
|
120 |
180 |
240 Iя, А |
||
|
|
|
|
|
Рис.2.15. График зависимости M = f (Iя ). |
|||||||||
При заданном в условии токеIя = 300 А момент равен526 H м. |
||||||||||||||
Пример. Определить номинальный момент на валу Mном , номинальные |
||||||||||||||
суммарные потери мощности ∑Pном |
и номинальный КПД ηном электродвига- |
|||||||||||||
теля постоянного тока типа П62 с параллельным возбуждением при номиналь- |
||||||||||||||
ном режиме работы, если номинальные данные, указанные на его щитке: по- |
||||||||||||||
лезная мощность на валу Р2ном = 8 кВт, напряжение Uном = 220 В, частота вра- |
||||||||||||||
щения nном = 1000 об/мин, ток, потребляемый из сети, Iном = 43 А. |
||||||||||||||
Решение. Номинальный момент на валу электродвигателя: |
||||||||||||||
Мном = 9550 |
Р1ном = |
9550 |
|
8 |
= 76,5 Н м. |
|
||||||||
|
|
|
|
nном |
|
|
1000 |
|
|
|
|
|
||
Номинальная мощность, подведенная к электродвигателю из сети: |
||||||||||||||
Р1ном = Uном Iном = 220 43 = 9460 Вт. |
|
|
||||||||||||
Номинальные суммарные потери мощности в электродвигателе: |
||||||||||||||
∑Рном = Р1ном − Р2ном = 9,46 − 8 = 1,46 кВт. |
|
|||||||||||||
Номинальный КПД электродвигателя: |
|
|
||||||||||||
η |
ном |
= |
Р2ном |
= |
8 |
= 0,85 |
или η |
ном |
% = 85% . |
|
||||
|
|
Р |
|
9,46 |
|
|
|
|
|
|
|
|
||
|
|
|
1ном |
|
|
|
|
|
|
|
|
|
|
|
Пример. Генератор параллельного возбуждения имеет следующие дан- |
||||||||||||||
ные: Uном = 230 В, |
Iяном = 780 А, |
Iвном = 4,5 А и |
Rя = 0,018 Ом. Построить |
|||||||||||
внешнюю характеристику генератора в режимах холостого хода и короткого |
||||||||||||||
замыкания. |
|
|
|
|
|
|
|
|
|
|
|
|
||
66
Решение. На основании выражения E = 4,44 f w1 kw1 Ф, |
f = |
Pn1 |
|
60 |
|||
|
|
можно найти исходную расчетную зависимость, учитывая, что ЭДС является функцией тока возбуждения Eв = f (Iв ) , а ток возбуждения зависит от напря-
жения генератора Iв = |
U |
. Таким образом, ток нагрузки в данном случае опре- |
||||
R |
||||||
|
в |
|
E − IвRв |
|
E − U . |
|
деляется из соотношения Iя = |
или Iя = |
|||||
Rя |
||||||
|
|
|
|
Rя |
||
Для того чтобы воспользоваться универсальной магнитной характеристикой, необходимо знать, что ее аргумент и функция находятся по соотношениям:
x |
= |
|
Iв |
= |
|
U |
, |
y |
= |
Ф |
= |
E |
. |
|
I |
|
U |
|
Ф |
|
|||||||||
ф |
|
ном |
|
ном |
|
ф |
|
|
E |
|||||
|
|
|
|
|
|
|
|
|
ном |
|
ном |
|||
С их помощью расчет сводится к линейным преобразованиям
x = |
U |
, |
I |
я |
= |
Еном уф − Uном хф |
, |
|
|
|
|
|
|
||||||
ф |
Uном |
|
|
Rя |
|
||||
где номинальное значение ЭДС Eном = Uном + IяR = 244 В |
|||||||||
|
|
|
|
|
1 |
|
Ом. |
||
и проводимость якорной цепи |
|
||||||||
Rя = 55,5 |
|||||||||
В соответствии с полученными выражениями ток якоря равен нулю при
yф = Uном = 0,943. По универсальной магнитной характеристике это соответст-
xф Eном
вует значению аргумента xф = 1,04 или напряжению U = 240 В.
|
При коротком замыкании, т.е. при напряжении, равном нулю, ток |
||
Iя = |
Eном yф (0) |
= 677 А. |
|
Rя |
|||
|
|
||
График внешней характеристики генератора приведен на рисунке.
U, В |
|
|
|
|
200 |
|
|
|
|
150 |
|
|
|
|
100 |
|
|
|
|
50 |
|
|
|
|
0 |
1000 |
2000 |
3000 |
Iя, А |
Рис.2.16. График внешней характеристики генератора.
67
Электрические машины переменного тока
Машины переменного тока подразделяются на синхронные и асинхронные. Асинхронные машины используются в основном, как двигатели. В режиме торможения они работают как генераторы. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели преимущественно применяются в качестве привода мощных производственных машин.
Асинхронная машина - такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотой f1, поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростью n2 отличающейся от скорости вращения магнитного поля n1, называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как
врежиме двигателя, так и режиме генератора скорость вращения ротора асинхронной машины зависит от нагрузки.
Неподвижная часть машины - статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 1200 одна относительно другой. Обмотки подключены к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены обмотки трех катушек. Если катушки статора соединить между собой
взвезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле.
Ротор, представляет собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. При
вращении магнитного поля токов статора со скоростью n1, в проводниках ротора наводится ЭДС. Под действием ЭДС в короткозамкнутых витках ротора протекает ток, взаимодействующий с вращающимся магнитным полем. Это взаимодействие проявляется в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозной момент на его валу, то он получает ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратится, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью, отличной от скорости вращения поля.

68
Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора.
Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение:
|
|
s% = |
n1 − n2 |
100% |
|
|
|
||
где: |
|
|
n1 |
|
|
|
|
|
|
n2 - частота вращения ротора; |
||||
n = 60 f |
p |
- частота вращения магнитного поля; |
||
1 |
|
|
|
|
р - число пар полюсов двигателя. |
||||
Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2-6%.
При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются.
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора - как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот.
Величины этих ЭДС определяются по формулам:
Е1 = 4,44ω1 f1Kоб1Фм Е2 = 4,44ω2 f2Kоб2Фм
где:
Е1 - ЭДС обмотки статора, Е2 - ЭДС обмотки неподвижного ротора,
Kоб1и Kоб2 |
- соответственно обмоточные коэффициенты обмоток стато- |
ра и ротора, |
|
ω1 и ω2 |
- число обмоток статора и ротора, |
Фм - основной магнитный поток, f1 - частота тока цепи,
f2 = sf1 - частота ЭДС ротора. Из этого соотношения следует, что частота
ЭДС ротора пропорциональна скольжению.
При неподвижном роторе f2 = f1, т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная

69
диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора.
ЭДС во вращающемся роторе Е2s = sЕ2
Индуктивное сопротивление вращающегося ротора:
X2s = 2π f2L2 = 2π sf1L2 = sX2
Активное сопротивление ротора R2 не зависит от частоты. По закону Ома ток в роторе равен:
I2s = |
|
E2s |
|
= |
|
sE2 |
|
= |
|
|
E2 |
|
|
R2 |
2 + X2s |
2 |
R2 |
2 + s2 X22 |
R |
2 |
2 |
|
|||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
+ X2 |
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
Электрическая |
|
мощность, |
подведенная |
к двигателю из се- |
|||||||||
тиР1 = 3U1фI1фсоsϕ1 , преобразуется |
в |
нем |
в |
механическую. Преобразование |
|||||||||
энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины - Рст и на нагрев обмотки статораРм.ст. Остальная
мощность электромагнитным путем передается на ротор и называется электромагнитной мощностьюРэм. Часть мощности, переданной на ротор, тратится на
нагрев меди обмоток ротора Рм. рот и зависит от скольженияРм. рот = sРэм . Остальная часть мощности называется полной механической мощностьюРмех. Если из полной механической мощности вычесть механические потери Рмехи добавочные потери Рдоб то получится полезная мощность на валу двигателяР2 .
К.п.д асинхронного двигателя:
η = |
Р1 − ∑Р |
, где ∑Р = Рст + Рм.ст + Рм. рот + Рмех + Рдоб |
|
||
|
Р1 |
|
Величина к.п.д. асинхронных двигателей составляет от 0,7 до 0,9 и выше. Механическая мощность ротора:
Рмех = Мω2 = М 2π60n2
где : М - вращающий момент двигателя.
Электромагнитная мощность вращающегося магнитного поля:
Рэм = Мω1 = М 2π60n1
Основные режимы работы асинхронного двигателя: пуск двигателя в ход, холостой ход двигателя, рабочий режим двигателя.
Рабочий режим двигателя при номинальной нагрузке характеризуется номинальными параметрами различными для каждого асинхронного двигателя. Основным номинальным параметром асинхронного двигателя является его номинальная мощностьРном . Это мощность выражается в киловаттах и соответст-
вует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Ра-

70
бота двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима.
Вторым параметром двигателя является его номинальная скорость вращенияnном .
Важным электрическим параметром является напряжение, для которого предназначен двигательUном. Номинальный ток двигателя устанавливается, ис-
ходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя.
Номинальный момент Мном часто вычисляют по упрощенной формуле, учитывая номинальные значения величин:
М = 975 |
Р2 |
(кГм.) |
или |
М = 9550 |
Р2 |
(Нм.) |
|
n |
n |
||||||
|
|
|
|
|
|||
|
2 |
|
|
|
2 |
|
Для расчета зависимости вращающего момента асинхронного двигателя от скольжения с достаточной точностью применяется упрощенная формула:
М = |
2Мmax |
|
s sкр + sкр s |
где:
Мmax - максимальный вращающий момент,
sкр- критическое скольжение, при котором вращающий момент достигает
своего максимального значения, его величина зависит от активного сопротивления цепи ротора. При известном номинальном скольжении критическое определяется по формуле:
|
|
Мmax |
|
|
Мmax |
|
2 |
|
|
sкр = sном |
|
+ |
|
− 1 |
|
||||
|
|
|
|
|
|
|
|||
|
|
|
|||||||
|
Мном |
|
Мном |
|
|
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Зависимость вращающего момента от его скольжения или, от скорости вращения ротора называют механической характеристикой двигате-
ля. М = f (n2 ), приU = const , f1 = const .
Для оценки рабочих свойств двигателя пользуются его рабочими характеристиками. Рабочими характеристиками асинхронного двигателя называют кривые, характеризующие зависимость электромагнитного моментаМ , тока статораI1 , к.п.д.η , и коэффициента мощности на валу сosϕ от полезной мощ-
ности Р2 на валу при неизменном напряжении и частоте питающего напряже-
нияU = const , f1 = const .
В зависимости от конструктивного выполнения роторной обмотки трехфазные асинхронные двигатели разделяются на два типа: двигатели с короткозамкнутым ротором и двигатели с фазным.
71
При пуске двигателя с короткозамкнутым ротором скорость вращения ротора в первый момент n2 =0, чему соответствует максимальное скольжение
s =1, двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4-10 раз больше номинального. Пусковой момент составляет 0,9 - 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому используется прямой пуск - включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового
тока в цепи произойдет в k2 раз, где k - коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети: М U 2 .
Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора.
Пусковые качества двигателей характеризуются коэффициентами кратности пускового тока Iпуск Iном и пускового моментаМпуск Мном .
Частота вращения двигателя регулируется изменением частоты вращения магнитного поля (частоты питающего напряжения), переключением пар полюсов, изменением активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой.
В синхронном двигателе частота вращения двигателя равна частоте вращения магнитного поля: n2 = n1 = 60 f1 р .
Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением:
М = 3Е0I cosϕ 9,55 n2 = 3Е0U sinθ 9,55 n2 X1
где:
θ - угол между векторами ЭДС и напряжения, т.е. cosθ = ЕU , X1 - полное индуктивное сопротивление двигателя.
На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума

72
нагрузки и двигателем - в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми.
Синхронная машина состоит из двух частей: неподвижной части - статора и вращающейся части - ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения - на роторе.
Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения машины к сети переменного тока. При этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать.
Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается.
Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине.
Пример. Определить мощность, подводимую к трехфазному асинхронному двигателю с фазным ротором, а также ток в обмотках статора при их соединении звездой и треугольником. Номинальные параметры двигателя: полез-
ная мощность |
на |
валу |
P = 30 кВт, |
напряжение на |
статореU = 380 В, |
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
220 |
η = 88% ,cosϕ = 0,85. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
|
Решение. |
Активная |
мощность, |
|
потребляемая |
двигателем, равна |
||||||||
P = |
P2 |
= 34,1 кВт, полная мощностьS = |
|
P1 |
|
= 40,1 кВ А. |
|
|
||||||
|
|
|
|
|
|
|||||||||
1 |
η |
|
|
|
|
cosϕ |
|
|
|
|
||||
|
|
|
|
|
S |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
При соединении обмоток звездойI = |
|
|
= 61 А, при соединении тре- |
||||||||||
|
|
3 Uλ |
||||||||||||
угольникомI = |
|
S |
= 61 А. |
|
|
|
|
|
|
|
||||
3 U |
|
|
|
|
|
|
|
|
||||||
73
Пример. Определить мощность, подводимую к трехфазному асинхронному двигателю с фазным ротором, а также ток в обмотках статора при их соединении звездой и треугольником. Номинальные параметры двигателя: полез-
ная мощность |
на |
валу |
P = 30 кВт, |
напряжение на |
статореU = 380 В, |
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
220 |
η = 88% ,cosϕ = 0,85. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
|
Решение. |
Активная |
мощность, |
|
потребляемая |
двигателем, равна |
||||||||
P = |
P2 |
= 34,1 кВт, полная мощностьS = |
|
P1 |
|
= 40,1 кВ А. |
|
|
||||||
|
|
|
|
|
|
|||||||||
1 |
η |
|
|
|
|
cosϕ |
|
|
|
|
||||
|
|
|
|
|
S |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
При соединении обмоток звездойI = |
|
|
= 61 А, при соединении тре- |
||||||||||
|
|
3 Uλ |
||||||||||||
угольникомI = |
|
S |
= 61 А. |
|
|
|
|
|
|
|
||||
3 U |
|
|
|
|
|
|
|
|
||||||
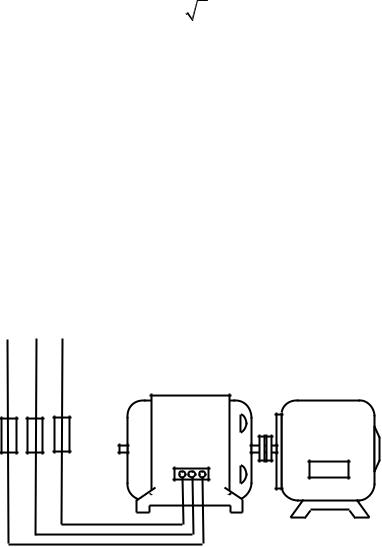
Пример. Для привода лифта использован трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети с частотой напряжения f1 = 50 Гц (рис.2.17), с числом пар полюсов p и частотой
вращения ротораn2 . Определить частоту вращения n1 и Ω1 вращающегося
магнитного поля, скольжение s ротора, частоту |
f2пуск тока в роторе при пуске |
||||
′ |
|
′ |
, частоту тока |
′ |
в |
и в рабочем режиме f2 |
, а также частоту вращения ротораn2 |
f2 |
|||
роторе при возрастании нагрузки на валу двигателя, с учетом того, что частота
′ |
при этом уменьшилась на 5% и составляет0,95n2 . |
вращения ротора n2 |
3x380 B
B 


||||||||||||||||| |
П |
||||||||||||||||| |
Рис.2.17. Трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети.
Решение. Частота вращения магнитного поля (синхронная частота вра-
щения) при числе пар полюсов p = 1 : n1 = 60 f1 = 60 50 = 3000 об/мин. p 1

74
ля:
ля:
Ω1
n2
Угловая |
частота |
вращения |
магнитного |
по- |
=π n1 = 3,14 3000 = 314 рад/с. 30 30
Скольжение ротора двигателя: |
|
|
|
|
||||
s = |
n1 − n2 |
= 3000 − 2880 = |
120 |
|
= 0,04 . |
|
|
|
n |
3000 |
|
|
|
|
|||
|
3000 |
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
Частота |
вращения |
|
|
ротора |
двигате- |
|||
= 0,96n = 0,96 3000 = 2880 об/мин, n |
= n (1− s) . |
|
||||||
1 |
|
|
|
2 |
1 |
|
|
|
|
|
|
Частота |
тока |
в |
роторе |
двигателя |
при |
пуске |
|
( n2пуск = 0, sпуск = 1): f2пуск = f1s = 50 1 = 50 Гц. |
|
|
|
|
||||||
|
n2 |
|
Частота |
тока |
ротора |
при |
частоте |
вращения |
двигате- |
|
ля |
|
= f s = 50 0,04 = 2 Гц. |
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
|
′ |
1 |
|
|
|
|
|
|
|
|
|
f2 |
Частота |
вращения |
ротора |
при возросшей нагрузке |
на валу |
двигате- |
|||
|
′ |
= 0,95n2 |
= 0,95 2880 = 2736 об/мин. |
|
|
|
|
|||
ля: n2 |
|
|
|
|
||||||
|
|
|
Скольжение |
ротора |
при |
возросшей |
нагруз- |
|||
|
|
|
′ |
= 3000 − 2736 = 0,088. |
|
|
|
|
||
ке: s′ = n1 − n2 |
|
|
|
|
||||||
|
|
|
n1 |
3000 |
|
|
′′ |
′ |
|
= 4,4 Гц. |
|
|
|
|
|
|
|
|
|||
|
|
|
Частота тока ротора при возросшей нагрузке: f2 |
= f1s = 50 0,088 |
||||||
|
|
|
Пример. Для пуска восьмиполюсного асинхронного двигателя с фазным |
|||||||
ротором и номинальными параметрами: nном = 720 об/мин; |
Mкр = 1,8 Mном и |
|||||||||
Rя = 0,2 Ом используется пусковой реостат. Определить сопротивление Rп фа-
зы пускового реостата, чтобы при пуске двигатель развивал максимальный момент, если частота напряжения сети f1 = 50 Гц.
Решение. Номинальное скольжение определяется по формулам
|
|
|
|
n = n |
(1− s), |
n = |
60 f1 |
, |
||||
|
|
|
|
|
||||||||
|
|
|
|
2 |
|
1 |
|
1 |
p |
|
||
согласно которым n = 60 50 = 750 Об/мин |
|
|||||||||||
|
|
|||||||||||
|
|
|
1 |
|
|
8 |
|
|
|
|
||
и Sном = 750 − 720 = |
|
|
|
|
|
|
|
|||||
4% . |
|
|
|
|
|
|
||||||
|
750 |
|
|
|
|
|
|
|
|
|
|
|
Критическое скольжение равно |
|
|
|
|||||||||
|
M |
кр |
|
|
M |
кр |
|
− 1 = 4 (1,8 + |
0,8 ) = 10,8% . |
|||
sкр = sном |
|
+ |
|
|
||||||||
|
|
|
Mном |
|||||||||
|
Mном |
|
|
|
|
|
||||||
Пусковое сопротивление определяется из соотношения
sном |
= |
|
|
Rя |
, |
s |
|
R |
я |
+ R |
|
кр |
|
п |
|
||
|
|
|
|
|
|
|
|
|
|
|
75 |
отсюда R |
= R |
я |
|
sкр |
|
− 1 |
= 0,2 |
10,8 |
− 1 = 0,34 Ом. |
|
|
|
|
|
|||||||||
|
п |
|
|
|
|
4 |
|
|
|||
|
|
|
|
sп |
|
|
|
|
|||
Пример. Асинхронный двигатель с короткозамкнутым ротором имеет |
|||||||||||
следующие |
паспортные |
|
данные: |
Uном = 220/ 380 В, |
P2ном = 40 кВт, |
||||||
n2 = 980 об/мин, η = 91,5 %, cosϕ = 0,91. Кратность пускового тока k1 = 5, частота напряжения питания f1 = 50 Гц. Определить число пар полюсов, номи-
нальный и пусковой токи двигателя при соединении обмоток статора в треугольник и звезду.
Решение. Ближайшая стандартная синхронная частота n1 = 1000 об/мин,
следовательно, число пар полюсов p = 60 f = 3, т.е. машина шестиполюсная. |
|||||||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
n1 − n2 |
|
1 |
|
|
|
|
Скольжение равно |
s = |
100% = 2% , мощность, потребления двига- |
|||||||||||
|
|||||||||||||
|
|
|
|
|
|
|
n1 |
|
|
|
|
||
теля P = |
P2 |
|
= 43,7 кВт, номинальный момент = 9,55 P2 = 389,8 Нм. |
||||||||||
|
|||||||||||||
1 |
η |
|
|
|
|
|
|
|
n2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
При соединении обмоток треугольником номинальный ток |
|||||||||||||
Iфyjv = |
|
P1 |
|
= 126,3 А, |
|
|
|
|
|||||
|
3Uф cosϕ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
пусковой ток Iп = 5 Iфном = 629,5 А. |
|
|
|
||||||||||
При соединении обмоток звездой |
Iф = |
P1 |
|
= 73 А, пусковой ток |
|||||||||
3Uном cosϕ |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Iп = k1 Iф = 365 А, т.е. пусковой ток в этом случае в |
3 раз меньше. |
||||||||||||
Пример. Синхронный шестиполюсный двигатель имеет следующие но- |
|||||||||||||
минальные |
|
данные: |
Pном = 73 кВт, |
nном = 1000 об/мин, Uном = 660 В, |
|||||||||
Iном =125 А, X = 1 Ом. Определить номинальный и максимальный моменты
двигателя, если ЭДС двигателя равна 670 В. Построить угловую характеристику двигателя.
Решение. Номинальный момент определяется по формуле
Mном = Pном 9,55 = 6,97 кН м.
nном
Максимальный момент при sin Θ = 1 равен:
Mmax = 3 E0U 9,55 . n2 X
Подставляя исходные данные, |
получаем |
||
Mmax = |
3 670 660 9,55 |
= 12,7 |
кН м. |
|
1000 1 |
|
|