

16.6. Теорема об изменении кинетической энергии точки
Пусть точка массы mдвижется
под действием сил![]() .
Запишем для данной точки основное
уравнение динамики (2) (1.2)
.
Запишем для данной точки основное
уравнение динамики (2) (1.2)
Проецируя его на касательную
![]() ,
получим
,
получим![]() .
.
Касательное ускорение представим в
виде
 ,
тогда
,
тогда![]()
Умножим обе части этого равенства на
![]() и внесем
и внесем![]() под знак дифференциала. Тогда замечая,
что
под знак дифференциала. Тогда замечая,
что![]() ,
где
,
где![]() –
элементарная работа силы
–
элементарная работа силы![]() ,
получим
,
получим
|
|
(3.11) |
Равенство (3.11) выражает теорему об
изменении кинетической энергии точки
в дифференциальной форме. Если в начальном
положении скорость точки равна
![]() ,
а в конечном -
,
а в конечном -![]() ,
то интегрируя равенство (3.11), получим:
,
то интегрируя равенство (3.11), получим:
|
|
(3.12) |
Равенство (3.12) выражает теорему об изменении кинетической энергии точки в конечной форме: изменение кинетической энергии точки на некотором ее конечном перемещении равно алгебраической сумме работ всех действующих на точку сил на том же перемещении.
Теорема об изменении кинетической энергии точки применяется, в основном, на тех же участках траектории движения точки, где задан путь пройденной точкой или этот путь надо определить.
17. Свободные прямолинейные колебания материальной точки
17.1 Свободные горизонтальные колебания точки.
17.2 Свободные вертикальные колебания груза.
17.1. Свободные горизонтальные колебания точки
Рассмотрим прямолинейное горизонтальное
движение точки М массы mпо неподвижной гладкой плоскости под
действием упругой силы (рис. 12)![]() пружины.
пружины.
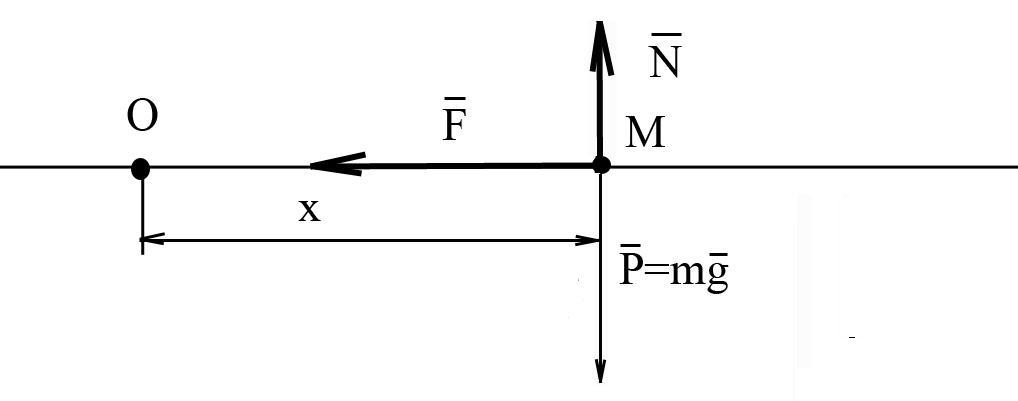
Рис. 12
Начало координат О выберем в положении
равновесия точки и направим ось
![]() вправо по оси пружины. Пусть М – одно
из положений точки в ее движении,
возникшем в результате нарушения
состояния равновесия. На точку М действуют
три силы: сила тяжести
вправо по оси пружины. Пусть М – одно
из положений точки в ее движении,
возникшем в результате нарушения
состояния равновесия. На точку М действуют
три силы: сила тяжести![]() ,
сила реакции
,
сила реакции![]() гладкой плоскости и упругая сила пружины
гладкой плоскости и упругая сила пружины![]() .
Пусть упругая сила подчиняется закону
Гука, т.е ее алгебраическое значение
.
Пусть упругая сила подчиняется закону
Гука, т.е ее алгебраическое значение![]() пропорционально величине деформации
(растяжения или сжатия) пружины
пропорционально величине деформации
(растяжения или сжатия) пружины
|
|
(4.1) |
Знак минус означает, что при растяжении
пружины (x> 0) имеем![]() <
0, т.е упругая сила направлена в
отрицательную сторону оси
<
0, т.е упругая сила направлена в
отрицательную сторону оси![]() ;
при сжатии - наоборот. Коэффициент
пропорциональности
;
при сжатии - наоборот. Коэффициент
пропорциональности![]() ,
размерность которого н/м, называется
жесткостью (упругостью) пружины. Из
формулы (4.1) имеем:
,
размерность которого н/м, называется
жесткостью (упругостью) пружины. Из
формулы (4.1) имеем:
|
|
(4.2) |
Составим дифференциальное уравнение
движения точки М в проекции на ось
![]() :
:![]() или
или![]() .
.
Обозначая
![]() ,
получим:
,
получим:
|
|
(4.3) |
Уравнение (4.3) представляет собой дифференциальное уравнение свободных колебаний материальной точки по гладкой горизонтальной плоскости.
Уравнение (4.3) является линейным однородным
дифференциальным уравнением второго
порядка с постоянными коэффициентами.
Полагая в уравнении
![]() ,
получим для определенияnхарактеристическое уравнение
,
получим для определенияnхарактеристическое уравнение![]() .
Поскольку корни этого уравнения являются
чисто мнимыми
.
Поскольку корни этого уравнения являются
чисто мнимыми![]() ,
то как известно из теории дифференциальных
уравнений, общее решение уравнения
(4.3) имеет вид
,
то как известно из теории дифференциальных
уравнений, общее решение уравнения
(4.3) имеет вид
|
|
(4.4) |
где
![]() и
и![]() - постоянные интегрирования. Если вместо
постоянных
- постоянные интегрирования. Если вместо
постоянных![]() и
и![]() ввести постоянные
ввести постоянные![]() и
и![]() такие, что
такие, что![]() ,
,![]() ,
то получим
,
то получим![]() или
или![]() .
.
Это другой вид решения уравнения (4.3),
в котором постоянными интегрирования
являются
![]() и
и![]() .
.
Колебания, совершаемые точкой по закону (4.5), называются гармоническими колебаниями. Скорость точки
|
|
(4.6) |
Величина
![]() ,
равная небольшому отклонению точки М
от точки О, называется амплитудой
колебаний. Величина
,
равная небольшому отклонению точки М
от точки О, называется амплитудой
колебаний. Величина![]() называется фазой колебаний. Фаза
называется фазой колебаний. Фаза![]() ,
в отличие от координаты
,
в отличие от координаты![]() определяет не только положение точки
в данный момент времени, но и направление
ее последующего движения, например из
положения М при фазе равной
определяет не только положение точки
в данный момент времени, но и направление
ее последующего движения, например из
положения М при фазе равной![]() ,
точка движения вправо, а при фазе, равной
,
точка движения вправо, а при фазе, равной![]() ,
влево. Фазы, отличающиеся на
,
влево. Фазы, отличающиеся на![]() ,
считаются одинаковыми. Величина
,
считаются одинаковыми. Величина![]() определяет
фазу начала колебаний (начальная фаза).
Например при
определяет
фазу начала колебаний (начальная фаза).
Например при![]() колебания происходят по закону синуса
(начинаются от центра О со скоростью,
направленной вправо), при
колебания происходят по закону синуса
(начинаются от центра О со скоростью,
направленной вправо), при![]() - по закону косинуса (начинаются из
положения
- по закону косинуса (начинаются из
положения![]() со
скоростью
со
скоростью![]() ).
Величина
).
Величина![]() называется круговой частотой колебаний
называется круговой частотой колебаний![]() .
.
Промежуток времени
![]() ( или
( или![]() ),
в течении которого точка совершает одно
полное колебание, называется периодом
колебаний. По истечению периода фаза
изменяется на
),
в течении которого точка совершает одно
полное колебание, называется периодом
колебаний. По истечению периода фаза
изменяется на![]() ,
откуда период
,
откуда период![]() .
.
Найдем значения
![]() и
и![]() .
.
Пусть в момент времени
![]() точка М находится в положении
точка М находится в положении![]() и имеет скорость
и имеет скорость![]() .
Подставляя эти значения в (4.5) и (4.6),
получим
.
Подставляя эти значения в (4.5) и (4.6),
получим![]() ,
,![]() .
Отсюда складывая вначале почленно
квадраты этих равенств, а затем деля их
почленно одно на другое, найдем
.
Отсюда складывая вначале почленно
квадраты этих равенств, а затем деля их
почленно одно на другое, найдем ,
,![]() .
.
Отметим важные свойства свободных колебаний:
амплитуда и начальная фаза колебаний зависят от начальных условий;
частота
 ,
а следовательно и период
,
а следовательно и период колебаний
от начальных условий не зависят.
колебаний
от начальных условий не зависят.