

21. Приложение теорем динамики системы к динамике твердого тела
Дифференциальные уравнения поступательного движения твердого тела. Дифференциальное уравнение вращения твердого тела вокруг неподвижной оси.
Определение динамических реакций подшипников при вращении твердого тела вокруг неподвижной оси.
Дифференциальные уравнения плоскопараллельного (плоского) движения твердого тела.
Элементарная теория гироскопа.
Дифференциальные уравнения движения твердого тела вокруг неподвижной точки (сферического движения). Дифференциальные уравнения движения свободного твердого тела.
21.1. Дифференциальные уравнения поступательного движения твердого тела
При поступательном движении твердого тела все его точки движутся так же, как и центр масс, поэтому дифференциальные уравнения движения центра масс тела являются дифференциальными уравнениями поступательного движения твердого тела:
![]()
Здесь
![]() - масса тела;
- масса тела;
![]() - координаты центра масс тела;
- координаты центра масс тела;
![]() - проекции внешних сил
- проекции внешних сил
![]() на оси координат.
на оси координат.
По дифференциальным уравнениям поступательного движения можно решать два основных типа задач на поступательное движение твердого тела.
по заданному движению твердого тела определять главный вектор приложенных к нему внешних сил и
по заданным внешним силам, действующим на тело и начальным условиям движения находить кинематические уравнения движения тела.
Изучение поступательного движения твердого тела, таким образом, сводится к изучению движения отдельной материальной точки, имеющей массу этого тела.
Дифференциальное уравнение вращения твердого тела вокруг неподвижной оси.
Рассмотрим твердое тело, вращающееся
вокруг неподвижной оси
![]() с
угловой скоростью
с
угловой скоростью![]() (рис.32)
(рис.32)
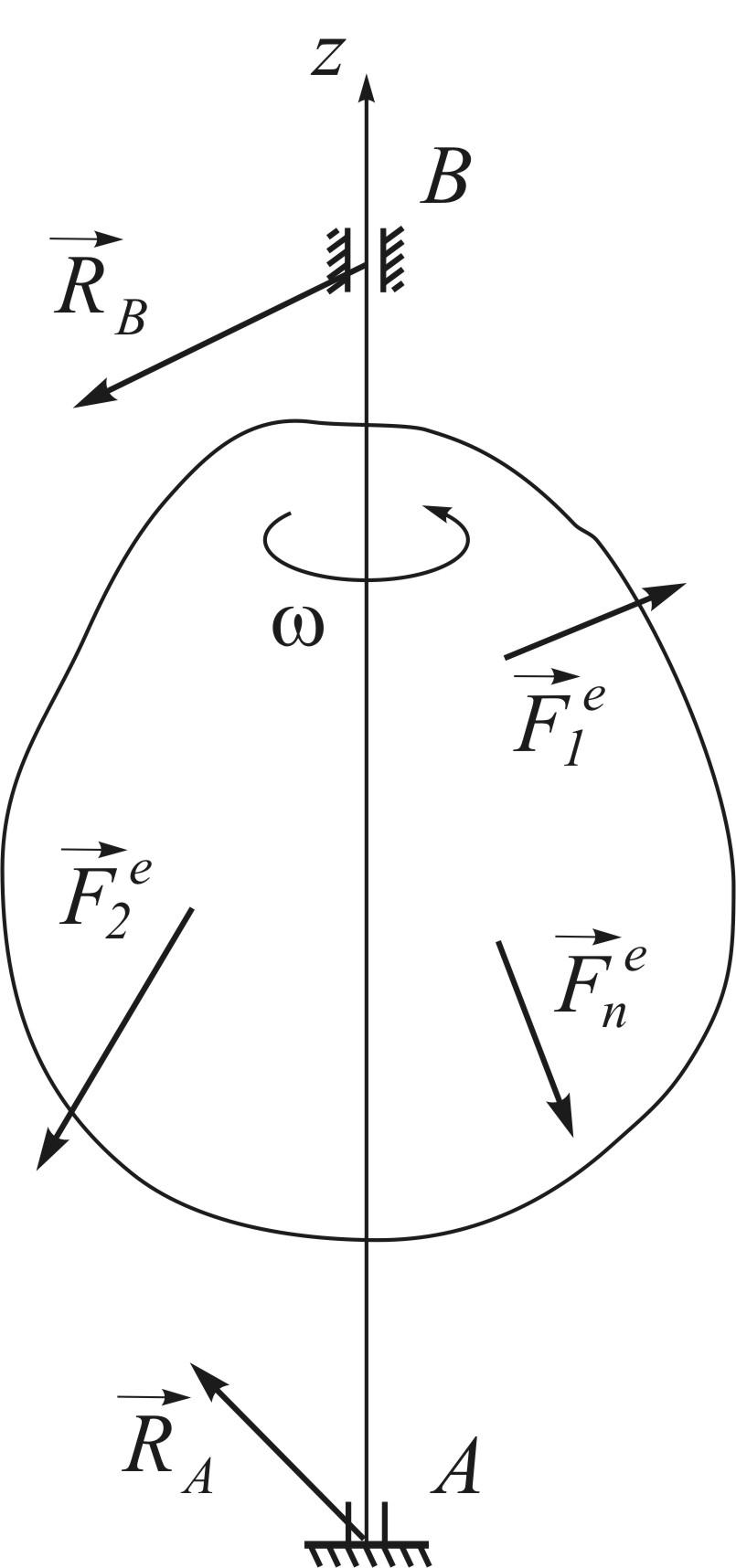
Рис. 32
Кинетический момент данного тела
относительно оси
![]() будет
будет
|
|
Реакции
![]() и
и![]() подпятника
подпятника![]() и подшипникаBявляются
внешними силами, но их моменты относительно
оси
и подшипникаBявляются
внешними силами, но их моменты относительно
оси![]() равны нулю. Тогда по теореме об изменении
кинетического момента системы
равны нулю. Тогда по теореме об изменении
кинетического момента системы![]() ,
получим
,
получим![]() ,
,![]() или
или![]()
Таким образом,
|
|
(8.1) |
Уравнение (8.1) представляет собой дифференциальное уравнение вращательного движения твердого тела: произведение момента инерции тела относительно оси вращения на угловое ускорение равно алгебраической сумме моментов внешних сил относительно оси.
21.2. Определение динамических реакций подшипников при вращении твердого тела вокруг неподвижной оси
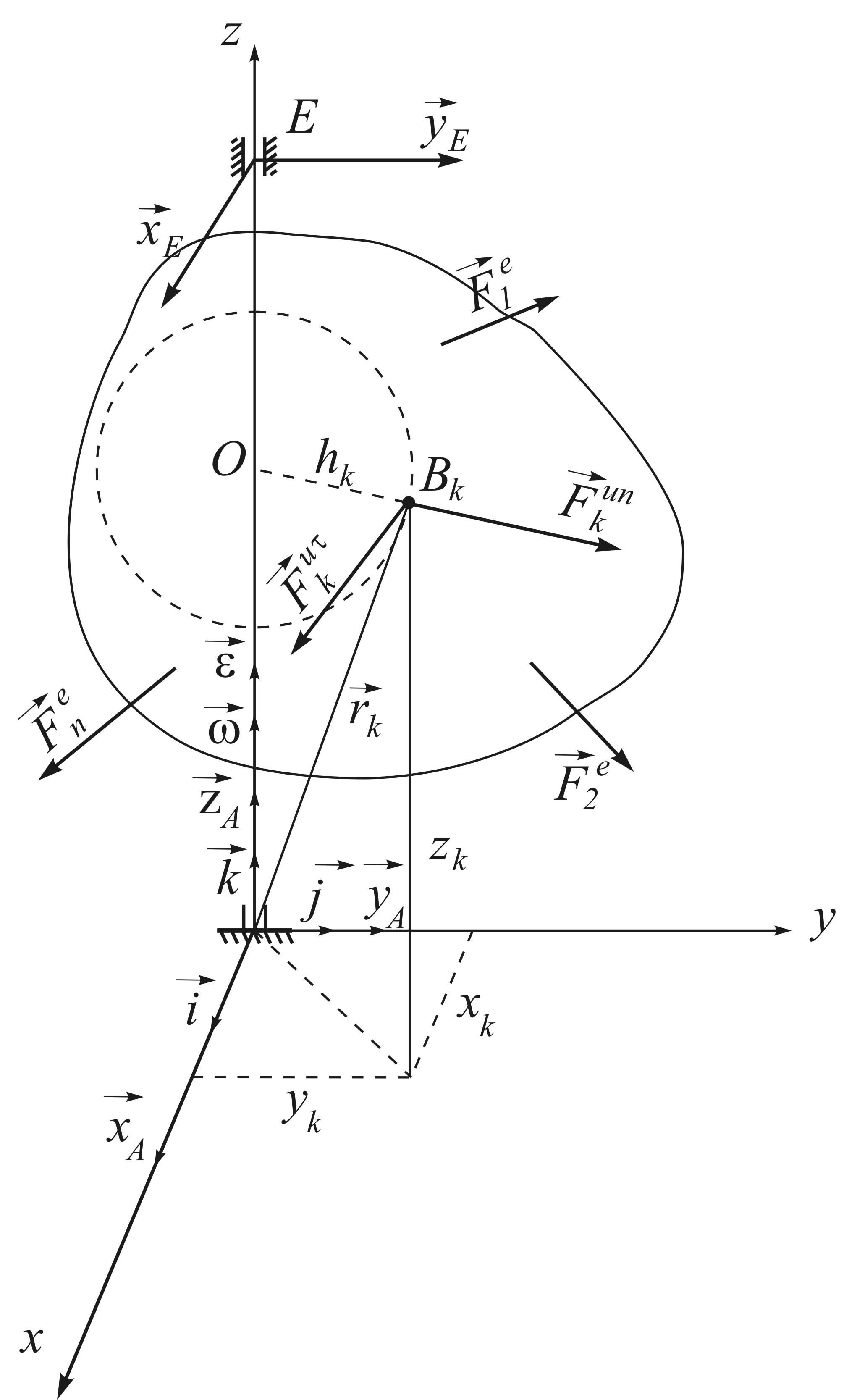
Рис. 33
Рассмотрим твердое тело, вращающееся
вокруг неподвижной оси
![]() под
действием приложенных к нему внешних
задаваемых сил
под
действием приложенных к нему внешних
задаваемых сил![]() .
Пусть тело, в рассматриваемый момент
имеет угловую скорость
.
Пусть тело, в рассматриваемый момент
имеет угловую скорость![]() и угловое ускорение
и угловое ускорение![]() .
Так как
.
Так как![]() ,
то
,
то![]() (рис. 33).
(рис. 33).
Составим вначале суммы проекций на
координатные оси сил инерции. Проведем
для точки
![]() радиус – вектор
радиус – вектор![]() .
.
Рассмотрим произвольную точку
![]() тела. Для нее сила инерции
тела. Для нее сила инерции![]() ,
где
,
где![]() - касательная сила инерции;
- касательная сила инерции;
![]() - нормальная сила инерции.
- нормальная сила инерции.
|
|
Так как
![]() ,
то
,
то
|
|
В проекциях на оси координат:
|
|
(а) |
![]() .
Так как
.
Так как
|
|
![]() .
.
В проекциях на оси координат:
|
|
(б) |
Суммируя равенства (а) и (б), получим:
|
|
По определению координат центра масс
![]() ,
,![]() ,
где
,
где
![]() - масса тела.
- масса тела.
Тогда
|
|
(в) |
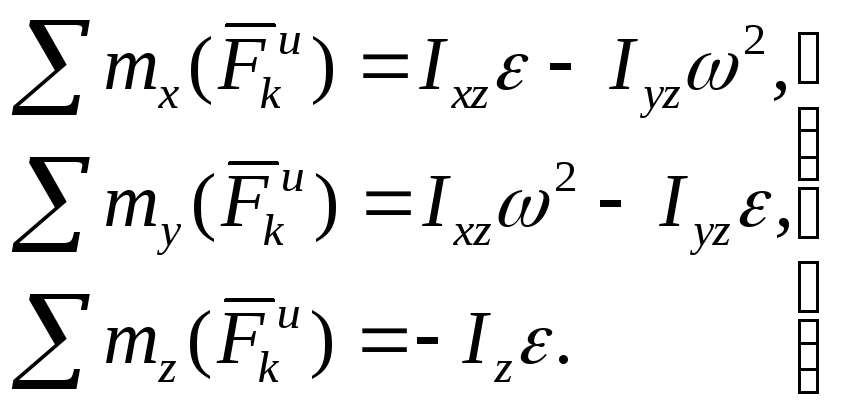
Найдем сумму моментов сил инерции относительно координатных осей.
|
|
 .
.
|
|
Тогда
|
|
Так как
![]() ,
,![]() - центробежные моменты инерции, а
- центробежные моменты инерции, а
![]() - момент инерции тела относительно оси
- момент инерции тела относительно оси![]() ,
то
,
то
|
|
(г) |
Расстояние
![]() между
подпятником
между
подпятником![]() и подшипником
и подшипником![]() обозначим
обозначим![]() .
.
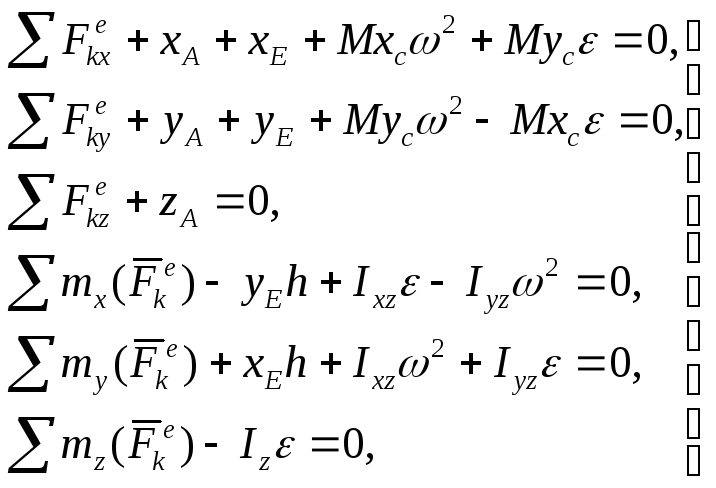
Согласно принципа Даламбера заданные силы, силы реакций и силы инерции находятся в равновесии в любой момент времени. Составим для этой системы сил шесть уравнений равновесия с учетом равенств (в) и (г):
|
|
(8.2) |
Установим условия, при которых динамические составляющие реакций подшипников равны нулю. Чтобы получить эти условия, приравняем нулю сумму членов, зависящих от сил инерции в каждом из уравнений
|
|
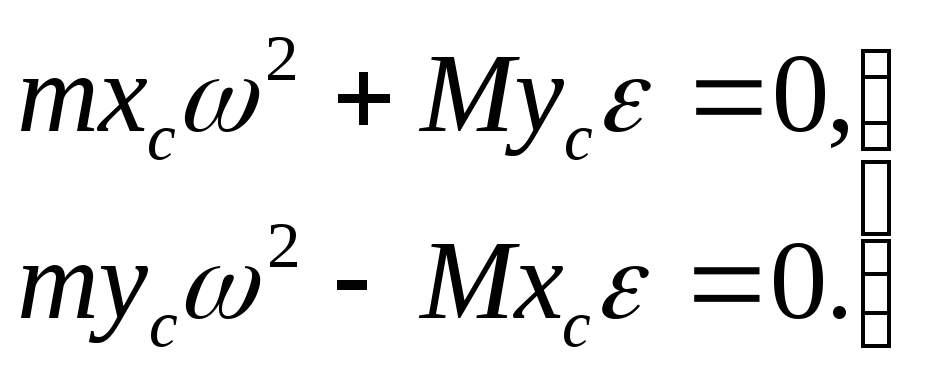
Решая эту систему относительно
![]() и
и![]() ,
получим
,
получим![]() ,
,![]() ,
,
т.е. устанавливаем, что центр тяжести тела должен находиться на оси его вращения.
|
|
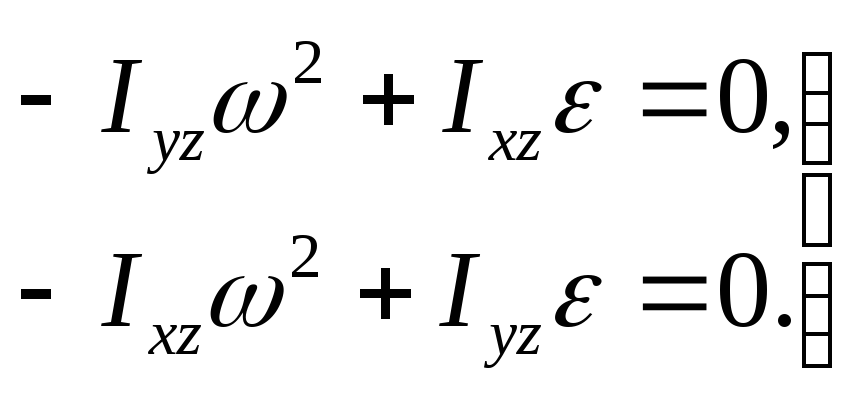
Решая эту систему относительно
![]() и
и![]() ,
получим
,
получим![]() ,
,![]() это означает, что ось вращения
это означает, что ось вращения![]() тела
должна быть главной осью инерции тела
для начала координат.
тела
должна быть главной осью инерции тела
для начала координат.
Таким образом установлено, что динамические составляющие реакций подпятника и подшипника равны нулю в том случае, если ось вращения тела является главной центральной осью инерции тела.