

21.5 Дифференциальные уравнения движения твердого тела вокруг неподвижной точки (сферического движения)
Пусть на твердое тело, имеющее неподвижную
точку
![]() ,
действуют заданные внешние силы
,
действуют заданные внешние силы![]() и реакция
и реакция![]() связи (рис. 37).
связи (рис. 37).
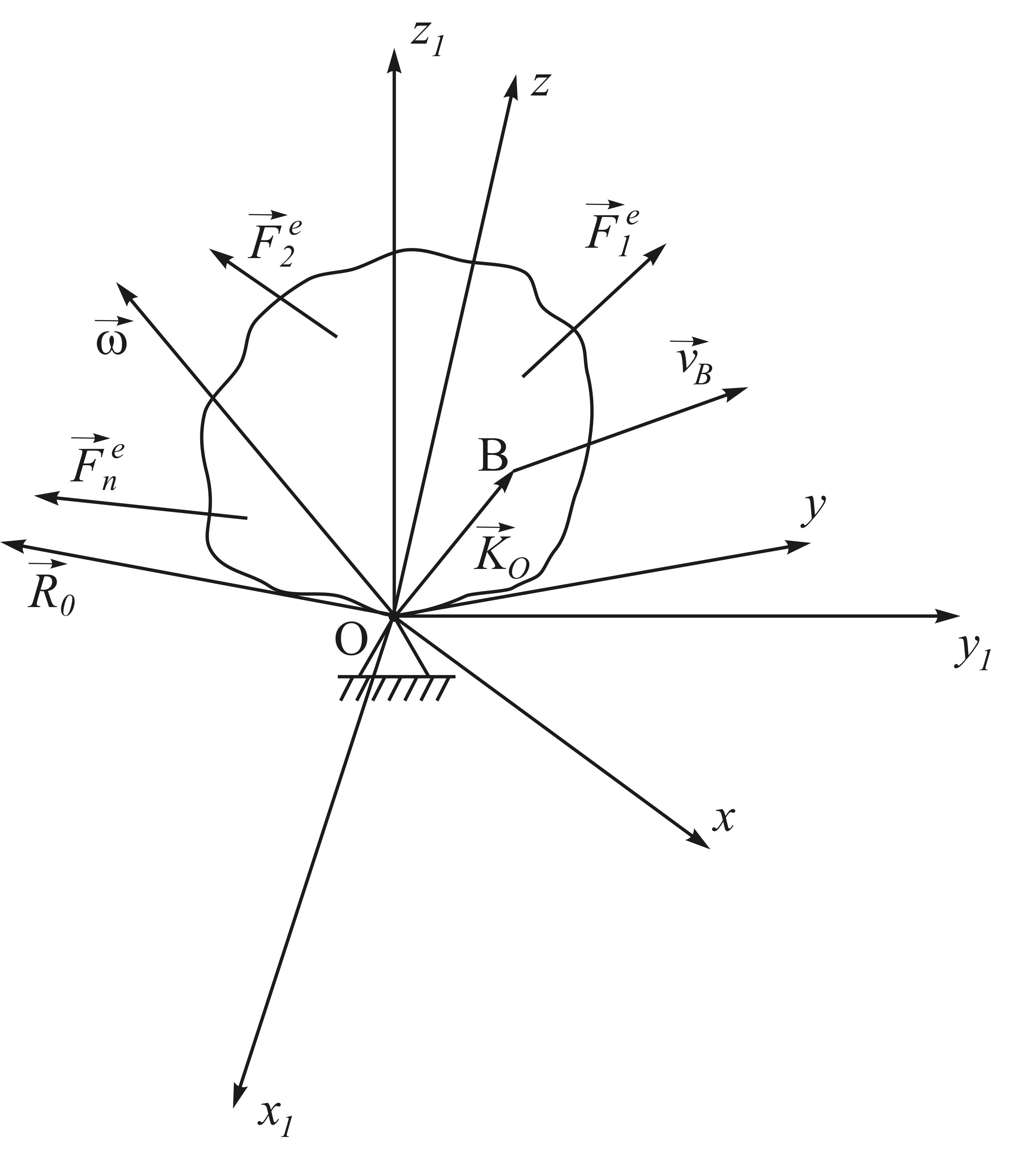
Рис. 37
Чтобы исключить из уравнений движения
неизвестную реакцию
![]() ,
воспользуемся теоремой об изменении
кинетического момента относительно
центра
,
воспользуемся теоремой об изменении
кинетического момента относительно
центра![]() ,
представив ее в виде (8.4), т.е. в виде
теоремы Резаля. Тогда, поскольку
,
представив ее в виде (8.4), т.е. в виде
теоремы Резаля. Тогда, поскольку![]() ,
уравнение (8.4) даст
,
уравнение (8.4) даст
|
|
(8.5) |
где
![]() ,
а
,
а![]() - скорость по отношению к инерциальной
системе отсчета
- скорость по отношению к инерциальной
системе отсчета![]() точки
точки![]() ,
совпадающей с концом вектора
,
совпадающей с концом вектора![]() .
.
Движение тела изучается тоже по отношению
к инерциальной системе отсчета
![]() .
Но чтобы получить уравнения этого
движения в наиболее простой форме
проецируем обе части предыдущего
равенства на жестко связанные с телом
и движущиеся вместе с ним оси
.
Но чтобы получить уравнения этого
движения в наиболее простой форме
проецируем обе части предыдущего
равенства на жестко связанные с телом
и движущиеся вместе с ним оси![]() ,
являющиеся главными осями инерции тела
для точки
,
являющиеся главными осями инерции тела
для точки![]() .
.
Тогда выражения проекций вектора
![]() будут иметь простой вид
будут иметь простой вид![]() , а входящие в них моменты инерции
, а входящие в них моменты инерции![]()
![]()
![]() ,
будут величинами постоянными.
,
будут величинами постоянными.
Для вычисления абсолютной скорости
![]() на подвижные оси представим
на подвижные оси представим![]() как сумму относительной (по отношению
к осям
как сумму относительной (по отношению
к осям![]() )
скорости
)
скорости![]() и переносной скорости
и переносной скорости![]() .
Тогда из уравнения (8.5)
.
Тогда из уравнения (8.5)
|
|
(8.6) |
Обозначим координаты точки
![]() через
через![]() .
При этом, так как радиусом – вектором
точки
.
При этом, так как радиусом – вектором
точки![]() является вектор
является вектор![]() ,
то
,
то![]() .
.
Как указано в кинематике, при определении
![]() движение осей
движение осей![]() во внимание не принимается, следовательно
во внимание не принимается, следовательно![]() ,
а при определении
,
а при определении![]() точку
точку![]() можно рассматривать как принадлежащую
телу, связанному с осями
можно рассматривать как принадлежащую
телу, связанному с осями![]() .
Но это тело движется вокруг неподвижной
точки
.
Но это тело движется вокруг неподвижной
точки![]() .
.
По аналогии с формулой Эйлера из
кинематики
![]() ,
имеем
,
имеем
![]()
Заменяя в найденных выражениях
![]() и
и![]() величины
величины![]() ,
,![]() ,
,![]() их значениями и подставляя эти значения
их значениями и подставляя эти значения![]() ,
,![]() во второе из равенств (8.6), получим
во второе из равенств (8.6), получим
![]()
Аналогичные выражения получаются для
проекций первого из равенств (8.6) на оси
![]() и
и![]() .
.
Так как для связанных с телом осей
![]() величины
величины![]()
![]()
![]() постоянны, то окончательно найдем
следующие дифференциальные уравнения
движения твердого тела вокруг неподвижной
точки в проекциях на главные оси инерции
тела для этой точки:
постоянны, то окончательно найдем
следующие дифференциальные уравнения
движения твердого тела вокруг неподвижной
точки в проекциях на главные оси инерции
тела для этой точки:
|
|
(8.7) |
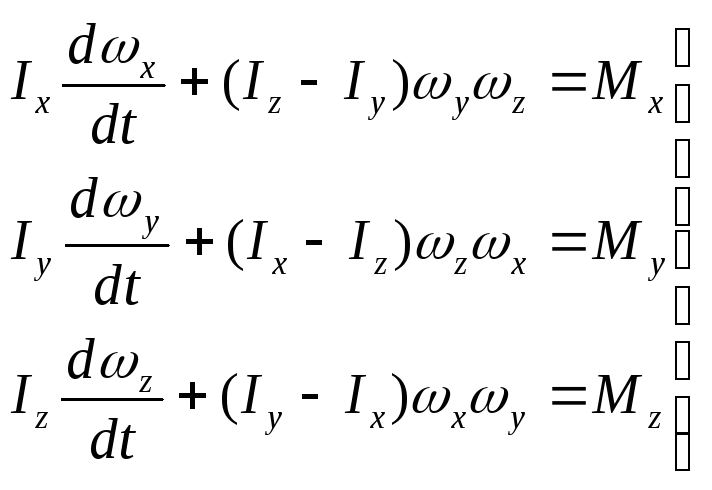
Уравнения (8.7) называются динамическими уравнениями Эйлера.
Дифференциальные уравнения движения свободного твердого тела.
Как известно, движение свободного
твердого тела слагается из поступательного
движения вместе с полюсом, в качестве
которого при решении задач динамики
выбирают обычно центр масс
![]() тела,
и из движения вокруг центра масс, как
вокруг неподвижной точки. Если на тело
действуют внешние силы
тела,
и из движения вокруг центра масс, как
вокруг неподвижной точки. Если на тело
действуют внешние силы![]() ,
то движение полюса
,
то движение полюса![]() описывается теоремой о движении центра
масс
описывается теоремой о движении центра
масс![]() ,
где
,
где![]() - масса тела.
- масса тела.
В проекциях на неподвижные оси
![]() это равенство дает:
это равенство дает:
|
|
(8.8) |
где
![]() - координаты центра масс тела.
- координаты центра масс тела.
Для движения же вокруг центра масс теорема об изменении кинетического момента дает в проекциях на главные центральные оси инерции тела три уравнения, совпадающие по виду с уравнениями (8.7). Таким образом, система дифференциальных уравнений (8.7), (8.8) описывает движение свободного твердого тела.
22. Начала аналитической механики
22.1 Введение
Аналитическую механику отличает общность аналитических методов постановки и решения задач механики. Будь то составление уравнений равновесия или движения механических систем, разыскание возможных положений равновесия или законов движения, исследование устойчивости равновесия или движения и т.д.
Основы аналитической механики были разработаны Ж. Лагранжем. В своем курсе, вышедшем в 1788 году он писал: «В этой работе совершенно отсутствуют какие бы то ни было чертежи. Излагаемые мною методы не требуют ни построений, ни геометрических или механических рассуждений; они требуют только алгебраических операций, подчиненных планомерному и однообразному ходу. Все любящие анализ с удовольствием убедятся в том, что механика становится новой отраслью анализа, и будут мне благодарны за то, что этим путем я расширил область его применения».
В основе аналитической механики лежат понятия связи, возможного перемещения и возможной работы. Определения, важные для последующего изложения, поясним, прибегнув к простому примеру.
Возьмем математический маятник – рис 38.
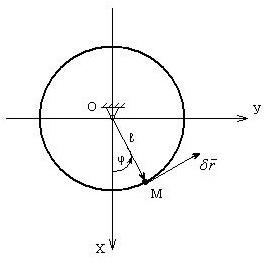
рис.38
Материальная точка с помощью безмассового жесткого стержня подвешена к центру вращения О. Понятно, что точка М несвободна. Её движение подчинено условию:
|
|
(9.1) |
Данное условие является уравнением голономной (ограничения наложены на координаты (х, у) точки и на её положение), удерживающей (точка М не может ни удалиться от центра О, ни приблизиться к нему), стационарной (время tявно не входит в уравнение (9.1)) связи.
Если стержень заменить нитью, получим голономную, стационарную, неудерживающую связь (точка М не может удалиться от центра О, но может приближаться к нему). Неудерживающие связи записываются в виде неравенств. Наконец, если длина нити будет переменной, зависящей от времени l=l(t), связь будет голономной, неудерживающей, нестационарной. Есть вид связей, называемых неголономными, которые накладывают ограничения на скорости точек системы. В нашем курсе системы с такими связями не рассматриваются.
Продифференцируем уравнение (9.1) по времени:
![]() .
.
Отсюда, заменив символ dна δ, получим:
|
|
(9.2) |
Это условие называют варьированным уравнением связи. Оно накладывает ограничение, как на координаты, так и на приращения (вариации) координат.
Условие (9.2) можно представить в форме:
|
|
(9.3) |
где
![]() - возможное (элементарное) перемещение
точки М. Возможным перемещением точки
называют бесконечно малое, воображаемое
перемещение, совместимое со связями.
Из (9.3) видно, что возможное перемещение
точки М направлено по касательной к
траектории.
- возможное (элементарное) перемещение
точки М. Возможным перемещением точки
называют бесконечно малое, воображаемое
перемещение, совместимое со связями.
Из (9.3) видно, что возможное перемещение
точки М направлено по касательной к
траектории.
Мы определили положение точки М с помощью
координат x,yи ввели уравнение связи. Можно поступить
иначе. Учтя связь, сразу определить
положение точки М с помощью координаты
(угла)![]() .
Координаты, при введении которых
непосредственно учитываются связи,
называют обобщенными координатами. В
голономной системе число обобщенных
(независимых) координат равно числу
степеней свободы.
.
Координаты, при введении которых
непосредственно учитываются связи,
называют обобщенными координатами. В
голономной системе число обобщенных
(независимых) координат равно числу
степеней свободы.
Предположим, что на точку М действует
система
![]() ,
,![]() ,
… ,
,
… ,![]() активных сил. Помимо них к точке приложена
реакция
активных сил. Помимо них к точке приложена
реакция![]() связи (стержня). Возможной (элементарной)
работой активных сил называют
алгебраическую величину:
связи (стержня). Возможной (элементарной)
работой активных сил называют
алгебраическую величину:
|
|
(9.4) |
Аналогично – для реакции связи:
![]()
Но поскольку
![]() ,
то
,
то![]() .
Связь в нашем случае является идеальной.
Связи называются идеальными, если
возможная работа их реакции на любом
возможном перемещении системы равна
нулю.
.
Связь в нашем случае является идеальной.
Связи называются идеальными, если
возможная работа их реакции на любом
возможном перемещении системы равна
нулю.