

16.1. Количество движения и кинетическая энергия точки. Импульс силы.
Количество движения и кинетическая энергия являются основными динамическими характеристиками движения точки.
Количество движения материальной точки
называется векторная величина
![]()
![]() ,
равная произведению массы точки на ее
скорость. Вектор
,
равная произведению массы точки на ее
скорость. Вектор![]() направлен так же, как и скорость точки,
т.е по касательной к ее траектории.
направлен так же, как и скорость точки,
т.е по касательной к ее траектории.
Кинетической энергией материальной
точки называется скалярная величина
![]() ,
равная половине произведения массы
точки на квадрат ее скорости.
,
равная половине произведения массы
точки на квадрат ее скорости.
Элементарным импульсом силы
![]() называется
векторная величина
называется
векторная величина![]() ,
равная произведению силы
,
равная произведению силы![]() на элементарный промежуток времениdt:
на элементарный промежуток времениdt:![]()
Полный импульс силы за некоторый конечный промежуток времени будет
![]()
В проекциях на оси координат:
![]() ,
,![]() ,
,![]()
Если
![]() ,
то
,
то![]() или
или![]()
В проекциях на оси координат:
![]() ,
,![]() ,
,![]()
Если к точке приложено несколько сил
![]() то
их равнодействующая
то
их равнодействующая![]() .
Умножим обе части этого равенства на
.
Умножим обе части этого равенства на![]() и проинтегрируем
и проинтегрируем
![]() ,
откуда
,
откуда![]() ,
т.е импульс равнодействующей равен
геометрической сумме импульсов всех
равнодействующих на точку сил.
,
т.е импульс равнодействующей равен
геометрической сумме импульсов всех
равнодействующих на точку сил.
В проекциях на оси координат:
![]()
![]()
![]()
16.2. Теорема об изменении количества движения точки.
Пусть точка М массы mдвижется под действием сил![]() (рисунок
1). Запишем для данной точки основное
уравнение динамики (1.2)
(рисунок
1). Запишем для данной точки основное
уравнение динамики (1.2)
![]()
Так как
![]() ,
,![]() то
основное уравнение динамики запишется
в виде:
то
основное уравнение динамики запишется
в виде:
|
|
(3.1) |
Равенство (3.1) выражает теорему об изменении количества движения точки в дифференциальной форме: производная по времени от количества движения точки равна геометрической сумме всех действующих на точку сил.
Пусть в момент времени t=0
скорость точки![]() ,
а в момент времениtскорость точки
,
а в момент времениtскорость точки![]() .
Разделяя переменные в равенстве и
интегрируя, получим:
.
Разделяя переменные в равенстве и
интегрируя, получим:
![]()
Так как
![]() ,
геометрической сумме импульсов сил
,
геометрической сумме импульсов сил![]() ,
то
,
то
|
|
(3.2) |
Равенство (3.2) выражает теорему об изменении количества движения точки в конечном виде: изменение количества движения точки за некоторый конечный промежуток времени равно геометрической сумме импульсов всех действующих на точку за тот же промежуток времени в проекциях на оси координат:
![]() ;
;
![]() ;
;
![]() .
.
Теорема об изменении количества движения точки в основном применяется на тех участках траектории движения точки, на которых задано время движения точки или это время нужно определить.
16.3. Момент количества движения точки относительно центра и оси. Теорема об изменении момента количества движения точки (теорема моментов)
В некоторых задачах в качестве динамической
характеристики движения точки вместо
самого вектора количества движения
![]() рассматривают его момент относительно
некоторого центра или оси.
рассматривают его момент относительно
некоторого центра или оси.
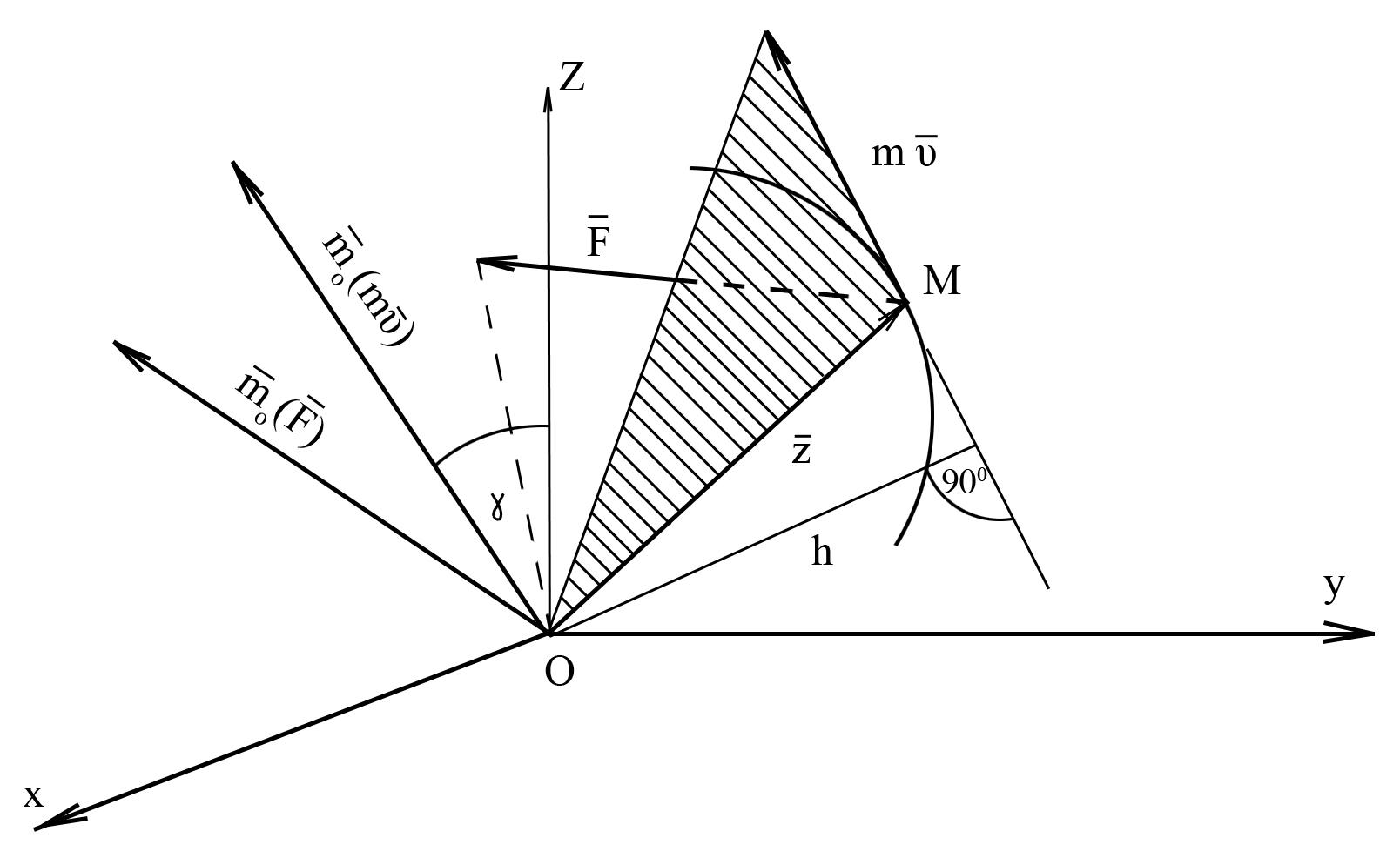
Рис. 5
Эти моменты определяются так же, как и моменты силы в статике.
Таким образом, моментом количества
движения точки относительно некоторого
центра О называется векторная величина
![]() ,
определяемая равенством:
,
определяемая равенством:
|
|
(3.3) |
где r– радиус – вектор
движущейся точки М, проведенный из
центра О. Вектор![]() направлен перпендикулярно плоскости,
проходящей через вектор
направлен перпендикулярно плоскости,
проходящей через вектор![]() и
центр О, а
и
центр О, а![]() (рис. 5: для сравнения на нем показан и
вектор
(рис. 5: для сравнения на нем показан и
вектор![]() ,
который перпендикулярен плоскости,
проходящей через
,
который перпендикулярен плоскости,
проходящей через![]() и
центр О)
и
центр О)
Момент количества движения точки
относительно какой-нибудь оси
![]() ,
проходящей через центр О, будет равен
проекции вектора
,
проходящей через центр О, будет равен
проекции вектора на
эту ось:
на
эту ось:
![]() ,
,
где
![]() – угол между вектором
– угол между вектором![]() и осью
и осью![]() .
.
Теорема моментов устанавливает, как
изменится со временем вектор
![]() .
Для доказательства продифференцируем
по времени равенство (3.3) . Получим:
.
Для доказательства продифференцируем
по времени равенство (3.3) . Получим:![]()
Но
![]() как векторное произведение двух
параллельных векторов, а
как векторное произведение двух
параллельных векторов, а![]()
Следовательно,
![]() или
или
|
|
(3.4) |
Равенство (3.4) выражает теорему моментов относительно центра: производная по времени от момента количества движения точки, взятого относительно какого-нибудь неподвижного центра равна моменту действующей на точку силы относительно того же центра.
Проецируя равенство (3.4) на какую-нибудь
ось
![]() ,
проходящую через центр О, получим:
,
проходящую через центр О, получим:![]() .
.
Равенство (3.5) выражает теорему моментов относительно оси
Из равенства (3.4) следует,
что если ![]() ,
то
,
то![]()