

23. Малые колебания консервативной системы около положения равновесия
23.1 Кинетическая и потенциальная энергия малых колебаний
Вернемся к уравнениям Лагранжа в форме:
![]()
При стационарных связях кинетическая и потенциальная энергия:
![]()
В положении равновесия
![]() ,
,![]() ,
,![]() .
В отклоненном положении координаты
.
В отклоненном положении координаты![]() и их скорости
и их скорости![]() являются малыми величинами. Функции Т
и П можно разложить по степеням малых
величин. Как доказывается / /, при малых
колебаниях кинетическая и потенциальная
энергия выражаются квадратичными
формами с постоянными коэффициентами:
являются малыми величинами. Функции Т
и П можно разложить по степеням малых
величин. Как доказывается / /, при малых
колебаниях кинетическая и потенциальная
энергия выражаются квадратичными
формами с постоянными коэффициентами:

где
![]() - коэффициенты инерции (постоянные),
- коэффициенты инерции (постоянные),
![]() - коэффициенты обобщенной жесткости
(квазиупругие коэффициенты), также
постоянные.
- коэффициенты обобщенной жесткости
(квазиупругие коэффициенты), также
постоянные.
Для системы с одной степенью свободы:
|
|
(10.1) |
Для системы с двумя степенями свободы:
|
|
(10.2) |

Уравнения Лагранжа при малых колебаниях, поскольку кинетическая энергия не зависит от обобщенных координат, можно записывать в форме:
![]() .
.
23.2 Понятие об устойчивости равновесия
Колебания системы будут оставаться малыми, если они совершаются в окрестности её устойчивого положения равновесия. Устойчивость есть либо стремление системы вернуться в исходное положение, после того как она из него была выведена, либо как способность пребывать вблизи этого исходного положения. В первом случае устойчивость называют асимптотической, во втором – обыкновенной. Если же система, после того как её точкам сообщили малые смещения и скорости, еще далее начинает уходить от положения равновесия, то её положение равновесия будет называться неустойчивым. Строгое понятие устойчивости и неустойчивости дано А. М. Ляпуновым - / /.
На рис. показан пример – шарик на гладкой поверхности.

Рис. 46
Нетрудно оценить его состояние равновесия в отношении устойчивости. В случае а) равновесие устойчиво, в случае б) – неустойчиво. Случай в) является особенным. Здесь шарик безразличен к смещениям, но неустойчив относительно скоростей. Подобные системы изучаются в теории устойчивости движения.
Достаточный признак устойчивости равновесия консервативной системы сформулирован в теореме Лагранжа-Дирихле: если в положении равновесия потенциальная энергия системы имеет минимум, то равновесие устойчиво.
Отсюда следует, что вопрос об устойчивости сводится к изучению структуры выражения потенциальной энергии.
|
|
10.3 |
В положении равновесия П = 0. Чтобы нулевое значение было минимумом, функция П в окрестности этой точки должна быть определенно положительной квадратичной формой. Оценочным критерием определенной положительности квадратичной формы являются неравенства Сильвестра.
|
|
10.4 |
 .
.Данные неравенства можно трактовать как условия устойчивости положения равновесия консервативной системы.
Примеры.
1. Однородный брусок заданных размеров и веса положен на цилиндр заданного радиуса. Относительное перемещение бруска и цилиндра происходит при чистом качении. Выяснить, при каком условии равновесие бруска на цилиндре будет устойчивым?
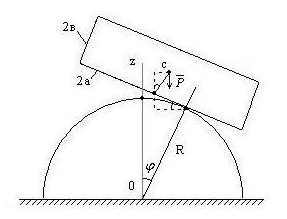
Рис. 47
Сообщим системе перемещение и составим выражение потенциальной энергии силы тяжести:
|
|
(1) |
Равновесие устойчиво, если:
|
|
(2) |
Из (1) находим производные:

Отсюда при
![]() получаем условие устойчивости:
получаем условие устойчивости:
|
|
(3) |
На рис. показаны возможные случаи устойчивости и неустойчивости.

Рис. 48