

22.4 Уравнения Лагранжа второго рода
Уравнения Лагранжа второго рода предназначены для составления дифференциальных уравнений движения голономных систем довольно общего вида. Если кинетическая и потенциальная энергии системы определены и выражены через обобщенные координаты, то последующие выкладки в уравнениях Лагранжа доведены до автоматизма. Важное достоинство получаемых таким образом уравнений – они не содержат реакций связей (к тому же неизвестных). Но если возникает необходимость определения таких реакций, то метод Лагранжа (путем введения так называемых избыточных координат) позволяет решать и эту задачу.
Будем исходить из общего уравнения динамики:
|
|
(9.21) |
Возьмем систему с идеальными стационарными
связями (уравнения Лагранжа не меняют
своей формы и при нестационарных связях),
и пусть
![]() - обобщенные координаты системы. Тогда
радиус – вектор каждой точки может быть
выражен через обобщенные координаты:
- обобщенные координаты системы. Тогда
радиус – вектор каждой точки может быть
выражен через обобщенные координаты:
|
|
(9.22) |
Отсюда находим формулы для вычисления скорости:
|
|
(9.23) |
и возможного перемещения:
|
|
(9.24) |
Нетрудно убедиться в таких тождествах:
|
|
(9.25) |
Подставляя (9.24) в (9.21), получим:
|
|
(9.26) |
Здесь
![]() - обобщенная сила (как уже известно, из
аналитической статики), соответствующая
обобщенной координате
- обобщенная сила (как уже известно, из
аналитической статики), соответствующая
обобщенной координате![]() .
.
С помощью (9.25) доказывается, что:
![]() ,
,
где Т – кинетическая энергия системы.
В результате уравнение (9.21) принимает вид:
|
|
(9.27) |
Это уравнение называют общим уравнением динамики в обобщенных координатах. Все вариации в данном уравнении независимы, их можно сообщать поочередно, а потому, как нетрудно видеть, выражения в скобках будут нулями.
Мы приходим, таким образом, к уравнениям Лагранжа второго рода:
|
|
(9.28) |
При движении системы в потенциальном силовом поле обобщенные силы выражаются через потенциальную энергию, и уравнения (9.28) принимают вид:
|
|
(9.29) |
В этом случае их можно представить также в такой компактной форме:
|
|
(9.30) |
где L=T-M– функция Лагранжа (кинетический потенциал).
Замечание. Обобщенную координату называют циклической, если она не входит явно в функцию LЛагранжа. Нециклические координаты называют позиционными.
Пусть
![]() – циклическая координата. Для циклических
координат уравнения (9.30) принимают вид:
– циклическая координата. Для циклических
координат уравнения (9.30) принимают вид:
|
|
(9.31) |
Отсюда следует:
|
|
(9.32) |
Данные интегралы называют циклическими. Они представляют собой обобщение законов сохранения количества движения и кинетического момента системы.
Примеры.
1. Механическая система состоит из малой
и большой призм с массами mиM. Малая скользит по
боковой грани большой призмы, которая,
в свою очередь, движется по гладкой
горизонтальной плоскости под действием
заданной силы![]() .
Составить дифференциальные уравнения
движения системы. Угол α наклона грани
задан.
.
Составить дифференциальные уравнения
движения системы. Угол α наклона грани
задан.
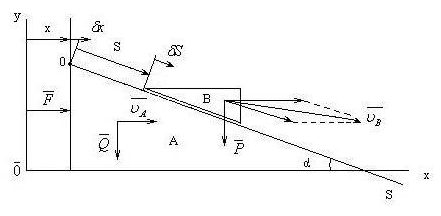
рис. 43.
Применим уравнения Лагранжа в форме (9.28). Рассматриваемая система имеет две степени свободы. За обобщенные координаты примем: х – абсолютное перемещение призмы А; S– относительное перемещение призмы В. Следует раскрыть уравнения:
|
|
(1) |
Замечая, что кинетическая энергия не зависит от координат, а, следовательно,
![]() ,
,
находим левые части уравнений (1):
|
|
(2) |
Обобщенные силы найдем из выражения
элементарной работы, сообщая поочередно
элементарные перемещения
![]() и
и![]() .
Остановим мысленно призмуBна грани призмыAи сообщим
всей системе (как твердому телу)
перемещение
.
Остановим мысленно призмуBна грани призмыAи сообщим
всей системе (как твердому телу)
перемещение![]() .
Получим выражение для элементарной
работы
.
Получим выражение для элементарной
работы![]() .
Отсюда следует
.
Отсюда следует![]() .
Далее, при остановленной призме А сообщим
перемещение
.
Далее, при остановленной призме А сообщим
перемещение![]() малой призме. Получим
малой призме. Получим![]() .
Отсюда следует
.
Отсюда следует![]() .
.
Подставляя (2) и выражения для обобщенных сил в (1), получим дифференциальные уравнения движения системы:
![]()
2. Составить дифференциальные уравнения
колебаний двойного математического
маятника. Маятник состоит из двух
материальных точек M1иM2веса![]() и
и![]() ,
прикрепленных к концам двух невесомых
стержней. Первый стержень может вращаться
вокруг неподвижной горизонтальной осиO, а второй – вокруг оси,
связанной с точкойM1.
,
прикрепленных к концам двух невесомых
стержней. Первый стержень может вращаться
вокруг неподвижной горизонтальной осиO, а второй – вокруг оси,
связанной с точкойM1.
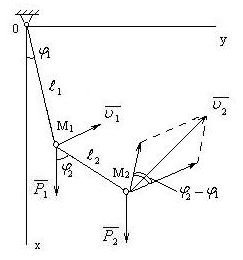
рис. 44.
Система имеет две степени свободы. За
обобщенные координаты примем углы
![]() и
и![]() отклонения стержней от вертикали. Для
решения задачи воспользуемся уравнениями
Лагранжа в форме (9.29). В нашем случае они
запишутся так:
отклонения стержней от вертикали. Для
решения задачи воспользуемся уравнениями
Лагранжа в форме (9.29). В нашем случае они
запишутся так:
|
|
(1) |
Кинетическая энергия системы равна:
|
|
(2) |
При составлении выражения потенциальной
энергии сил тяжести иногда возникает
вопрос о том, в какой точке, на каком
уровне принять нулевое значение П. От
этого зависит внешняя форма выражения.
Но здесь играет роль не П, а
![]() .
Производная же во всех случаях будет
одной и той же.
.
Производная же во всех случаях будет
одной и той же.
В рассматриваемой задаче представляется естественным принять П=0 для каждой точки, когда они находятся на оси Ох ( в положении равновесия). Если из отклоненного положения возвращать систему на ось Ох, работа сил тяжести будет величиной положительной. А потому:
|
|
(3) |
Далее вопрос сводится к вычислению
производных. Остановимся на координате
![]() .
Имеем:
.
Имеем:
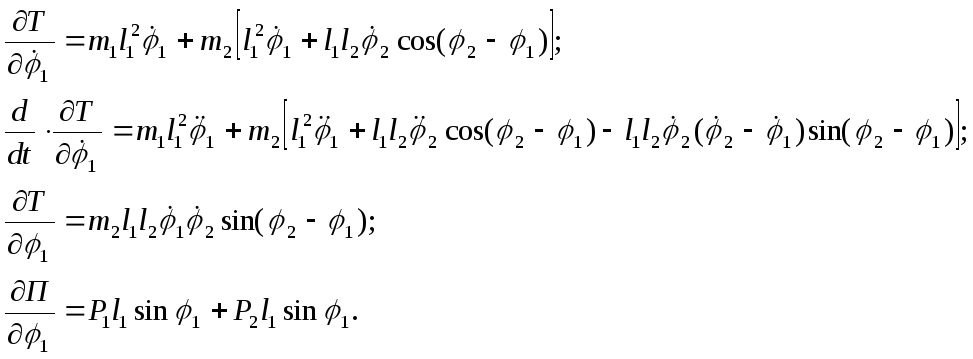
Совершенно аналогично – для координаты
![]() .
.
Окончательную систему запишем в виде:
![]()