

22.3 Принцип Даламбера. Общее уравнение динамики
Пусть задана несвободная система материальных точек с идеальными, голономными, удерживающими связями. Освободим систему от связей и запишем основной закон динамики для каждой точки:
|
|
(9.15) |
где
![]() - масса и ускорение точки (в инерциальной
системе отсчета),
- масса и ускорение точки (в инерциальной
системе отсчета),![]() - равнодействующая внешних сил,
- равнодействующая внешних сил,![]() - равнодействующая внутренних сил.
Представим (9.15) так, как мы это делали в
геометрической статике, т.е. в виде
условий равновесия:
- равнодействующая внутренних сил.
Представим (9.15) так, как мы это делали в
геометрической статике, т.е. в виде
условий равновесия:
|
|
(9.16) |
Слагаемое
![]() (произведение массы на ускорение, взятое
со знаком минус) называют силой инерции
точки. Знак минус свидетельствует о
том, что силы инерции направлены против
ускорений. Названий сил инерции столько,
сколько ускорений – касательная сила
инерции, нормальная сила инерции и т.д.
(произведение массы на ускорение, взятое
со знаком минус) называют силой инерции
точки. Знак минус свидетельствует о
том, что силы инерции направлены против
ускорений. Названий сил инерции столько,
сколько ускорений – касательная сила
инерции, нормальная сила инерции и т.д.
Система Nравенств (9.16) выражает собой принцип Даламбера: в любое мгновение совокупность сил внешних, внутренних и сил инерции представляют собой уравновешенную систему сил. Если сами силы, входящие в (9.16) и их векторные моменты относительно некоторого центра О просуммировать по всем точкам системы, то получим:
|
|
(9.17) |
где
![]() - главный вектор и главный момент сил
инерции,
- главный вектор и главный момент сил
инерции,![]() - кинетический момент. Условия (9.17)
прочитываются так: в каждое мгновение
главный вектор и главный момент внешних
сил уравновешиваются соответственно
главным вектором и главным моментом
сил инерции.
- кинетический момент. Условия (9.17)
прочитываются так: в каждое мгновение
главный вектор и главный момент внешних
сил уравновешиваются соответственно
главным вектором и главным моментом
сил инерции.
Теперь мы разделим все силы, приложенные к материальным точкам системы, по другому признаку: на активные и реакции идеальных связей, иначе говоря, на те, возможная работа которых не равна нулю, и на те, для которых та же работа равна нулю.
Вместо (9.16) будем иметь:
|
|
(9.18) |
где
![]() - равнодействующая активных сил,
- равнодействующая активных сил,![]() - равнодействующая реакций идеальных
связей. Принцип Даламбера в виде системы
(7.18) трактуется так: в каждое мгновение
совокупность сил активных, реакций
идеальных связей и сил инерции представляет
собой уравновешенную систему сил.
- равнодействующая реакций идеальных
связей. Принцип Даламбера в виде системы
(7.18) трактуется так: в каждое мгновение
совокупность сил активных, реакций
идеальных связей и сил инерции представляет
собой уравновешенную систему сил.
Вычислим сумму элементарных работ всех сил, входящих в (7.18). Приняв во внимание идеальность связей, придем к такому уравнению:
|
|
(9.19) |
Его называют общим уравнением динамики. Общее уравнение динамики объединяет собой принцип Даламбера и принцип возможных перемещений. Оно утверждает: всякая система материальных точек с идеальными и удерживающими связями движется с таким образом, что возможная работа сил активных и сил инерции на любом возможном перемещении системы равна нулю.
В скалярной форме общее уравнение динамики имеет вид:
|
|
(9.20) |
Примеры.
1. Два груза, один из которых опускается, а другой скользит без трения по крышке стола, связаны гибкой нерастяжимой нитью, перекинутой через блок. Стол установлен на шероховатом полу. Определить давление системы на пол.
Дано: m1,m2,m3– массы грузов и стола. Массой блока и нити пренебречь.
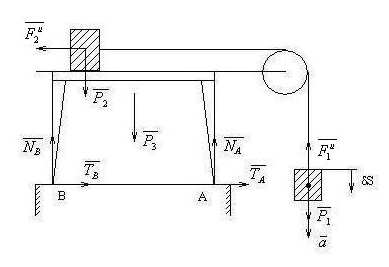
Найдем предварительное ускорение
![]() грузов. Следуя принципу Даламбера,
приведем грузы в состояние покоя,
приложив к ним силы инерции
грузов. Следуя принципу Даламбера,
приведем грузы в состояние покоя,
приложив к ним силы инерции![]() ;
сила инерции
;
сила инерции![]() ,
так как стол неподвижен. Затем сообщим
системе грузов элементарное перемещение
,
так как стол неподвижен. Затем сообщим
системе грузов элементарное перемещение![]() и запишем общее уравнение динамики:
и запишем общее уравнение динамики:
![]()
![]()
Отсюда находим ускорение:
|
|
(1) |
Для определения реакции пола воспользуемся
принципом освобождаемости. Освободив
систему от связей (отбросив пол) и введя
реакции, сообщим системе возможные
перемещения
![]() и
и![]() и запишем общее уравнение динамики:
и запишем общее уравнение динамики:
|
|
(2) |
где
![]() .
Из (2), поскольку
.
Из (2), поскольку![]() и
и![]() независимы, получим:
независимы, получим:
![]()
Отсюда, с учетом (1), найдем реакции:
![]()
Реакции приложены к ножкам стола, давления – к полу. Очевидно, когда грузы находятся в движении, ножки стола меньше давят на пол. Тяжесть опускающегося груза частично теряется.
2. Чтобы переместить рельс на другое
место, его положили на две трубы и
подействовали силой
![]() .
При заданной силе, массахMиm(рельса и трубы)
определить ускорение рельса.
Проскальзыванием между рельсом и
трубами, между трубами и опорной
плоскостью пренебречь.
.
При заданной силе, массахMиm(рельса и трубы)
определить ускорение рельса.
Проскальзыванием между рельсом и
трубами, между трубами и опорной
плоскостью пренебречь.
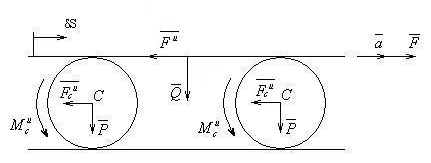
Рис. 42
Для решения задачи воспользуемся общим
уравнением динамики. Пусть
![]() - искомое ускорение. Ускорение
- искомое ускорение. Ускорение![]() центра трубы и её угловое ускорение
центра трубы и её угловое ускорение![]() равны:
равны:
![]()
где R– радиус трубы.
Рельс движется поступательно, прямолинейно,
а потому его силы инерции приводятся к
равнодействующей
![]() ,
приложенной в центре масс. Труба находится
в плоском движении. Её силы инерции,
будучи приведенными к центру масс, дадут
главный вектор и главный момент:
,
приложенной в центре масс. Труба находится
в плоском движении. Её силы инерции,
будучи приведенными к центру масс, дадут
главный вектор и главный момент:
![]()
Уравновесив систему задаваемых сил
силами инерции, сообщим рельсу элементарное
перемещение
![]() .
Для трубы
.
Для трубы![]() .
Остается записать общее уравнение
динамики:
.
Остается записать общее уравнение
динамики:
![]()
Отсюда, с учетом сказанного выше, найдем:
![]() .
.