

Глава 02 Векторная алгебра
.pdfГлава 2. Векторная алгебра |
75 |
Линейная комбинация называется тривиальной, если все без исключения её коэффициенты равны нулю. Любая тривиальная ли-
нейная комбинация векторов суть нулевой вектор и, следовательно,
она равна нулю.
Линейная комбинация называется нетривиальной, если хотя бы один из её коэффициентов отличен от нуля.
Если вектор представлен как линейная комбинация каких-то векторов, то говорят, что он разложен по этим векторам.
В векторной алгебре фундаментальное значение имеют по-
нятия линейно независимых и линейно зависимых векторов.
Линейно независимые и линейно зависимые векторы
Определение 2.7. Векторы a1, a2, , an называются линейно неза-
висимыми, если нулю может равняться только их тривиальная ли-
нейная комбинация.
Определение 2.8. Векторы a1, a2, , an называются линейно за-
висимыми, если существует хотя бы одна нетривиальная линейная комбинация этих векторов, равная нулю.
Теорема 2.2. Векторы a1, a2, , an линейно зависимые, если среди них имеется хотя бы один нулевой вектор.
► Пусть для определенности
1 a1 0 a2 0 a3 0 an 0 .
Выписанная линейная комбинация имеет коэффициенты

76 |
Глава 2. Векторная алгебра |
t1 1, t2 t3 tn 0,
следовательно, она нетривиальная. Равенство нулю нетривиальной линейной комбинации говорит о том, что рассматриваемые векторы линейно зависимы.◄
Теорема 2.3. Если среди векторов a1, a2, , an имеется хотя бы два линейно зависимых вектора, то тогда и все эти векторы будут линейно зависимыми.
► Выделим среди рассматриваемых векторов линейно зависимые векторы и составим из них равную нулю нетривиальную линейную комбинацию. Если к ней присоединить любую тривиальную комби-
нацию оставшихся векторов, то получим равную нулю нетривиаль-
ную линейную комбинацию уже всех векторов. Поэтому они линей-
но зависимы.◄
Теорема 2.4. Векторы a1, a2, , an линейно зависимы тогда и только тогда, когда один из них может быть разложен по остав-
шимся векторам.
► Необходимость. Если векторы линейно зависимы, то существует равная нулю нетривиальная линейная комбинация
t1 a1 t2 a2 tn an 0.
Пусть, ради определенности, не равно нулю число t1 , тогда
a1 s2 a2 sn an ,
где s2 |
|
t2 |
, …, |
sn |
|
tn |
. |
t1 |
|
||||||
|
|
|
|
|
t1 |
||

Глава 2. Векторная алгебра |
77 |
Достаточность. Предположим, что можно разложить вектор a1 :
a1 s2 a2 sn an . Записывая последнее равенство в виде
1 a1 s2 a2 sn an 0, получаем равную нулю нетривиаль-
ную линейную комбинацию, следовательно, векторы линейно зави-
симы. ◄
Линейные комбинации двух векторов
Теорема 2.5. Два вектора a и b линейно зависимы в том и только в том случае, если они коллинеарны.
► Из теоремы 2.1. вытекает, что ненулевые векторы a и b коллине-
арны в том и только в том случае, если 1 a t b 0, следователь-
но, существует равная нулю нетривиальная линейная комбинация.
Теорема справедлива и тогда, когда хотя бы один из этих векторов будет нулевым вектором. В этом случае векторы коллинеарны по определению1, а по теореме 2.2 они линейно зависимы.◄
Следствие. Любые два неколлинеарных вектора линейно независи-
мы.
Линейные комбинации трех векторов
Теорема 2.6. Три вектора a, b и с линейно зависимы в том и только в том случае, если они компланарны.
1 Нулевой вектор по определению коллинеарен любому вектору.
78 |
Глава 2. Векторная алгебра |
► Теорема очевидна, когда коллинеарны хотя бы два вектора из этих трех. Коллинеарные векторы линейно зависимы (теорема 2.5), по-
этому линейно зависимы и все три вектора (теорема 2.3). Они ком-
планарные, так как коллинеарные векторы имеют общую линию действия2, а через две пересекающиеся прямые (одну прямую, если коллинеарны все три вектора) всегда можно провести плоскость.
Остается рассмотреть случай, когда среди трех векторов нет коллинеарных.
Необходимость. Если эти векторы линейно зависимы, то, согласно теореме 2.4, один из них (пусть, для определенности, это будет век-
тор c) разлагается по остальным:
c t a s b,
Следовательно, в силу правила параллелограмма сложения векторов
и определения произведения вектора на число, векторы a, b, с бу-
дут компланарными.
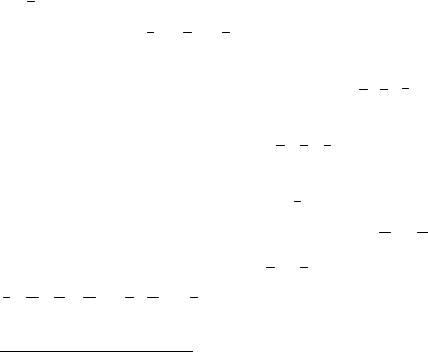
Достаточность. Компланарные векторы a, b, с лежат в одной плоскости и имеют общую точку приложения Поэтому один из них,
пусть ради определенности это будет вектор с, можно представить диагональю параллелограмма, построенного на векторах a1 и b1 ,
коллинеарных соответственно векторам a и b(рис. 2.3). Поэтому
c a1 b1 и a1 t a , b1 s b (теорема 2.1).В результате получим,
2 Векторы (свободные) имеют, вообще говоря, общее начало.

|
|
|
|
|
|
|
|
|
|
|
|
|
Глава 2. Векторная алгебра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
79 |
||||||||||||||
что |
|
t |
|
|
s |
|
. Три вектора |
|
|
, |
|
и |
|
линейно зависимы по тео- |
|||||||||||||||||||||||||||||
с |
a |
b |
a |
b |
с |
||||||||||||||||||||||||||||||||||||||
реме 2.4, так как один из них разлагается по другим двум. ◄ |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 |
|
|
О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
А |
|||||||||||||||||||
|
|
|
Рис.2.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.4 |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Следствие. Любые три некомпланарных вектора линейно независи-
мы.
Попутно доказано следующее условие компланарности:
Теорема 2.7. Три вектора a, b и с компланарны в том и только
в том случае, если существуют числа t |
и s такие, что |
||||||
|
|
t |
|
s |
|
|
(2.2) |
|
с |
a |
b |
||||
то есть один из них разложен по двум оставшимся.
Линейная зависимость четырех векторов
Теорема 2.8. Любые четыре вектора3 a, b, с и d линейно зави-
симы.
► Теорема очевидна, когда среди этих векторов какие-
нибудь три вектора компланарны (теоремы 2.5 и 2.3).
3 Напомним, что в этой главе рассматриваются только геометрические векторы.
80 Глава 2. Векторная алгебра
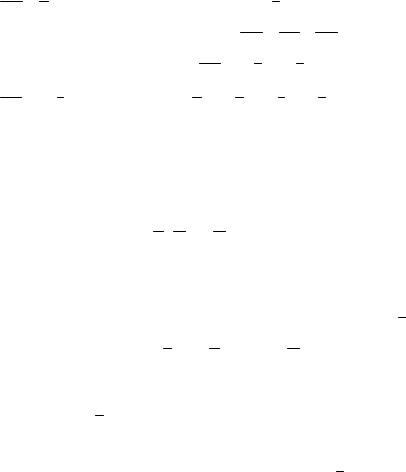
Обратимся теперь к случаю, когда среди рассматриваемых векторов нет трех компланарных и пусть точка O – общая точка приложения всех векторов. Проведем через точку D (конец вектора
OD d ) прямую, параллельную вектору с (рис. 2.4). Она пересе-
чет плоскость OAB в точке P. Тогда OD OP PD (правило тре-
угольника). Учитывая, что OP t1 a t2 b (теорема 2.6) и
PD t3 c , получим в итоге: d t1 a t2 b t3 c, то есть по тео-
реме 2.4 эти четыре вектора линейно зависимы. ◄
Понятие базиса. Координаты вектора
Определение 2.9. Базисом линейного пространства называют любой упорядоченный набор e1, e2, ,en векторов этого пространства,
если
-векторы, входящие в базис, линейно независимые;
-по этим векторам можно разложить каждый вектор a
пространства: a a1 e1 an en .
При этом числа a1, ,an называют координатами (или компонен-
тами) вектора a в данном базисе.
Координаты вектора записывают в круглых скобках после буквенного обозначения вектора. Например, запись a (1, 2,0) оз-

|
|
|
|
|
|
Глава 2. Векторная алгебра |
81 |
||||||||
начает, |
что координаты вектора |
|
|
в некотором выбранном базисе |
|||||||||||
a |
|||||||||||||||
|
|
, |
|
, |
|
равны 1, 2, 0 и |
|
|
|
2 |
|
. |
|
||
|
e1 |
e2 |
e3 |
a |
e1 |
e2 |
|
||||||||
Теорема 2.9. Разложение вектора по базису единственно. |
|
||||||||||||||
► Предположим, что это не так и возможны два разных разложения вектора a по базису e1, e2, ,en . Пусть a a1 e1 an en и
a b1 e1 bn en , где, например, a1 b1. Так как
a a (a1 b1) e1 (an bn) en 0,
то существует равная нулю линейная комбинация векторов базиса.
Векторы базиса по определению линейно независимы, поэтому ну-
лю может равняться только их тривиальная линейная комбинация, а
это возможно лишь в том случае, когда a1 b1 . Значит неверно предположение о том, что разложение вектора по базису не единст-
венно.◄
Определение 2.10. Три вектора принято называть упорядоченной тройкой векторов (или коротко тройкой), если указано, какой из них является первым, какой – вторым и какой – третьим. Два векто-
ра называют упорядоченной двойкой или парой, если указано, какой из них является первым, а какой − вторым.
Таким образом, в математике три вектора и тройка векторов,
два вектора и пара векторов представляют собой совершенно разные понятия. В случае двух или трех векторов не имеет значения, в ка-
ком порядке записаны эти векторы, а во втором случае, когда речь идет о паре или тройке векторов, заданный порядок записи обязате-

82 Глава 2. Векторная алгебра
лен − при изменении порядка записи векторов появится уже совсем другая пара или тройка векторов.
Из следствий к теоремам 2.5, 2.6 и из теорем 2.7, 2.8 вытека-
ет, что в пространстве B3 (пространстве всех геометрических векторов) в качестве базиса можно взять любую тройку некомпла-
нарных векторов, а в пространстве B2 (пространстве всех векто-
ров на плоскости) в качестве базиса можно использовать любую пару неколлинеарных векторов этой плоскости.
В приложениях наиболее популярны и чаще всего исполь-
зуются так называемые ортонормированные базисы – это базисы,
все векторы которых взаимно (попарно) ортогональны и имеют дли-
ну равную единице. Векторы ортонормированного базиса принято обозначать символами i, j, k . Координаты вектора в ортонормиро-
ванном базисе i, j, k будем называть декартовыми координатами этого вектора.
Очень важно то, что базис позволяет однозначно сопоста-
вить каждому вектору пару или тройку чисел – координаты вектора в данном базисе. Кроме того, при помощи базиса каждой паре или тройке чисел однозначно ставится в соответствие вектор, являю-
щийся линейной комбинацией векторов базиса, коэффициентами которой будут эти числа. Существенно и то, что при задании базиса линейные операции над векторами сводятся к линейным операциям с числами – координатами этих векторов.
|
|
|
|
|
Глава 2. Векторная алгебра |
83 |
|||||||||||
Пусть |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
a1 |
|
1 a2 |
|
a3 |
|
и |
|
b1 |
|
1 b2 |
|
b3 |
|
. |
|
|
a |
e |
e2 |
e3 |
b |
e |
e2 |
e3 |
|
||||||||
Так как векторы полностью определяются своими координатами, то
одно векторное равенство вида a b равносильно трем скалярным равенствам a1 b1, a2 b2, a3 b3.
Теорема 2.10. При умножении вектора на число все его координа-
ты умножаются на это число.
►Из свойств 1-8 следует, что если a a1 e1 a2 e2 a3 e3 , то
t a t(a1 e1 a2 e2 a3 e3) (ta1) e1 (ta2) e2 (ta3) e3 .◄
Теорема 2.11. При сложении векторов суммируются их соответ-
ствующие координаты.
► Из свойств 1-8 следует, что если
a a1 e1 a2 e2 a3 e3 |
и b b1 e1 b2 e2 b3 e3 , то |
a b (a1e1 a2e2 a3e3 )+(b1 e1 b2 e2 b3 e3 )=(a1 b1) e1
+(a2 b2) e2 (a3 b3) e3 .◄
Из теорем 2.1 и 2.10 вытекает ещё одно условие коллинеар-
ности двух векторов:

84 Глава 2. Векторная алгебра
Теорема 2.12. Ненулевые векторы a =(a1, a2, a3) и b =(b1, b2, b3)
коллинеарны в том и только в том случае, если их координаты про-
порциональны4:
a1 |
|
a2 |
|
a3 |
(2.3) |
|
|
b3 |
|||
b1 b2 |
|
|
|||
2.2.Скалярное произведение векторов
Угол между векторами. Проекция вектора на ось
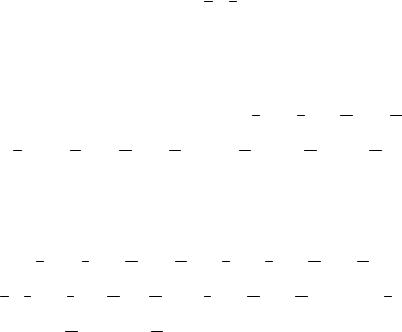
Любые два ненулевых вектора, имеющие общую точку приложения,
определяют на плоскости два угла, сумма которых равна 2 радиан
(рис. 2.5).
Определение 2.11. Углом между двумя ненулевыми векторами бу-
дем называть тот угол между ними, который не превосходит .
b
|
|
|
|
В |
|
|
a |
A |
|
|
|
|
|
|
B |
|
|
|
|
b |
|||
Рис.2.5 |
|
А |
|
||
|
|
Рис.2.6 |
|
|
4 Отметим, что условие пропорциональности (2.3) допускает равенства нулю отдельных координат векторов. В этом случае равенство нулю какойлибо координаты одного вектора влечет равенство нулю соответствующей
координаты другого вектора. Если, например, b1 0, то и a1 0.